Vous aimerez peut-être aussi
- BetonnageDocument10 pagesBetonnageDaoud Elkoursi100% (2)
- Dessin D'ensembleDocument9 pagesDessin D'ensembleBouabdellaoui saif ennasr100% (1)
- RAPPORT ETUDE D'UN BATIMENT R+1 PROJET 2ie PROMOTION 2013 LICENCE 3Document28 pagesRAPPORT ETUDE D'UN BATIMENT R+1 PROJET 2ie PROMOTION 2013 LICENCE 3Michée KouakouPas encore d'évaluation
- Arase Etanche Dtu 20.1Document2 pagesArase Etanche Dtu 20.1mehdiben86100% (2)
- 551-2 S - ET Auxiliaire Pelles Serie CDocument69 pages551-2 S - ET Auxiliaire Pelles Serie CChakroune100% (1)
- SérieTambour Motoréducteur CorrectionDocument6 pagesSérieTambour Motoréducteur CorrectionHamami Aymen100% (4)
- Série PILEDocument6 pagesSérie PILEHamami AymenPas encore d'évaluation
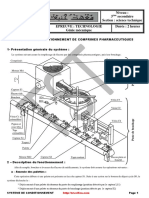
- Systeme de Conditionnement de Comprimes PharmaceutiquesDocument7 pagesSysteme de Conditionnement de Comprimes Pharmaceutiquessaber mecheri100% (3)
- TD6-1 CotationDocument3 pagesTD6-1 CotationKouki NizarPas encore d'évaluation
- Tp4 Demarrage Directe Deux Sens Rotation Avec Butee Fin de CourseDocument5 pagesTp4 Demarrage Directe Deux Sens Rotation Avec Butee Fin de CourseHAHAPas encore d'évaluation
- TP Four Électrique C4 DR 2019Document6 pagesTP Four Électrique C4 DR 2019CAlou PsoPas encore d'évaluation
- TP 1 Séléctivité AmpérométriqueDocument10 pagesTP 1 Séléctivité AmpérométriqueAMAL ER RAJIPas encore d'évaluation
- Devoir de Contrôle N°1 - Génie Électrique Fraiseuse Automatique - 3ème Technique (2011-2012) MR ImedachDocument6 pagesDevoir de Contrôle N°1 - Génie Électrique Fraiseuse Automatique - 3ème Technique (2011-2012) MR ImedachGTO FFPas encore d'évaluation
- TD 20 3 Grafcets Hiérarchisés Programme M340Document4 pagesTD 20 3 Grafcets Hiérarchisés Programme M340Alain DUPONCHELPas encore d'évaluation
- Grafcet TDDocument11 pagesGrafcet TDKhaled OuniPas encore d'évaluation
- 08-09 SI CI11 Synthese Cours GEMMADocument6 pages08-09 SI CI11 Synthese Cours GEMMATaoufiqBaouchPas encore d'évaluation
- Rappel PneumatiqueDocument6 pagesRappel PneumatiquePatb MaraasunPas encore d'évaluation
- Chargeur de Smartphone - Fiche Élèves Vierge - CopieDocument7 pagesChargeur de Smartphone - Fiche Élèves Vierge - CopieqzddqzdPas encore d'évaluation
- TP4-2 GM WinchDocument5 pagesTP4-2 GM WinchDABAKH LDEEBOYPas encore d'évaluation
- Expression Du Besoin D'un Guidage: Schémas D'une Liaison PivotDocument9 pagesExpression Du Besoin D'un Guidage: Schémas D'une Liaison PivotntayoubPas encore d'évaluation
- Page13 17Document7 pagesPage13 17Besbes ZiedPas encore d'évaluation
- Unité de Remplissage Des Bouteilles en Huile D'olive: Drep XXDocument20 pagesUnité de Remplissage Des Bouteilles en Huile D'olive: Drep XXAhmed ChebchoubPas encore d'évaluation
- 8 TP AOp PWM Ismin 1ADocument7 pages8 TP AOp PWM Ismin 1AFarid BakaPas encore d'évaluation
- CDE Info Procesus 1Document3 pagesCDE Info Procesus 1ChristianPas encore d'évaluation
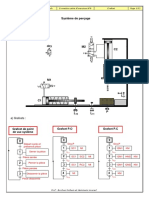
- TD Percage de PieceDocument3 pagesTD Percage de PieceIlyes BeyPas encore d'évaluation
- Partie Genie Electrique: Nom: ... Prénom: . . N°: . . 4STDocument4 pagesPartie Genie Electrique: Nom: ... Prénom: . . N°: . . 4STHakim SaidiPas encore d'évaluation
- 1830 Kazfets c1 tp12 Travail DemandeDocument4 pages1830 Kazfets c1 tp12 Travail DemandegirardPas encore d'évaluation
- TD Percage de PieceDocument3 pagesTD Percage de Pieceoussama100% (1)
- Manuel Des Plug-In de Commande Des Moteurs Du Robot L6201Document10 pagesManuel Des Plug-In de Commande Des Moteurs Du Robot L6201Sofiane AltairPas encore d'évaluation
- Logique CombinatoireDocument9 pagesLogique CombinatoireRouaissi Ridha100% (1)
- Cours Lycée Pilote - Technologie Fonctions Électroniques - 1ère As (2014-2015) MR Rafik Ben AmorDocument6 pagesCours Lycée Pilote - Technologie Fonctions Électroniques - 1ère As (2014-2015) MR Rafik Ben AmorFaïssolath AchirouPas encore d'évaluation
- Analyse FoncyionnelleDocument9 pagesAnalyse FoncyionnelleBen ameur AzizPas encore d'évaluation
- Ex Afsm Mi2021 CorrDocument9 pagesEx Afsm Mi2021 CorrIbrahim Êl BæzPas encore d'évaluation
- Manuel Du CoursDocument122 pagesManuel Du CoursResultats RecherchePas encore d'évaluation
- Upload - Série D'exercices N°8-3tech-Grafcet1 - 2013-2014 CorrectionDocument12 pagesUpload - Série D'exercices N°8-3tech-Grafcet1 - 2013-2014 CorrectionaymenmoatazPas encore d'évaluation
- Sistemas NeumáticosDocument78 pagesSistemas NeumáticosBárcena Nieto EduardoPas encore d'évaluation
- Axe Contrats de PhaseDocument3 pagesAxe Contrats de PhaseYoussef NajihPas encore d'évaluation
- TD Percage de PieceDocument5 pagesTD Percage de Piecevalou cnPas encore d'évaluation
- DS1 - DT - Cellule Flexible D'usinageDocument4 pagesDS1 - DT - Cellule Flexible D'usinageElafif Hamdi0% (1)
- TP3-1 GM RI40 ProfDocument5 pagesTP3-1 GM RI40 ProfRaphael OuwenPas encore d'évaluation
- Chapitre A1 24 UALDocument4 pagesChapitre A1 24 UALAngus MakPas encore d'évaluation
- Exam 2010 Elts de Reponse PDFDocument4 pagesExam 2010 Elts de Reponse PDFCharaf LeoPas encore d'évaluation
- L3 ELM TP AutomatismeDocument9 pagesL3 ELM TP AutomatismegadegbekoueliPas encore d'évaluation
- DevoirDocument2 pagesDevoirsoufiane8fkaPas encore d'évaluation
- Projet - CM - Palées de StabilitéDocument7 pagesProjet - CM - Palées de Stabilitélaura maidenPas encore d'évaluation
- Correction Devoir+de+Controle+N2 2AS+ Perceuse+Rotative 2021Document5 pagesCorrection Devoir+de+Controle+N2 2AS+ Perceuse+Rotative 2021aliPas encore d'évaluation
- Diagrama Sectron HGRS 2 PDFDocument9 pagesDiagrama Sectron HGRS 2 PDFElenilzaSantosPas encore d'évaluation
- Black Hole MK-II - Doc de MontageDocument8 pagesBlack Hole MK-II - Doc de Montagedreadlock holidayPas encore d'évaluation
- Diagramas para PDC de ProteusDocument5 pagesDiagramas para PDC de ProteustenoriojantonioPas encore d'évaluation
- Devoir+synt 3SCTech 2010Document8 pagesDevoir+synt 3SCTech 2010Bouabdellaoui saif ennasr100% (1)
- Photo - Schema Grip Canon Compatibles PDFDocument16 pagesPhoto - Schema Grip Canon Compatibles PDFjp79dsfrPas encore d'évaluation
- TP1 OscillateursDocument12 pagesTP1 OscillateursRaghadPas encore d'évaluation
- DS11 2017 - 2018Document8 pagesDS11 2017 - 2018Ridha Manaa100% (1)
- Copie de DC1 - 3st - DT - 2014Document4 pagesCopie de DC1 - 3st - DT - 2014Nejib JallouliPas encore d'évaluation
- CHP3Document8 pagesCHP3Wassim AlouiPas encore d'évaluation
- Metre Mechouar EssaidDocument12 pagesMetre Mechouar EssaidHamza HimriPas encore d'évaluation
- DT DC3 FinaleDocument6 pagesDT DC3 FinaleChaabane BOUALIPas encore d'évaluation
- 2012 Power Wheel (Sujet B) - CorrigeDocument6 pages2012 Power Wheel (Sujet B) - CorrigeFelix BonnetPas encore d'évaluation
- MembraneDocument14 pagesMembraneImene HarbaouiPas encore d'évaluation
- Exercices Logique Combinatoire Du Bac Technique en TunisieDocument9 pagesExercices Logique Combinatoire Du Bac Technique en TunisieOussama MezriguiPas encore d'évaluation
- Le syndrome périodique associé à la cryopyrine (CAPS)D'EverandLe syndrome périodique associé à la cryopyrine (CAPS)Pas encore d'évaluation
- Aide XRelais 09 - XRelais Et Les Schémas ArchitecturauxDocument7 pagesAide XRelais 09 - XRelais Et Les Schémas Architecturauxhaythem jameiPas encore d'évaluation
- Modifications Sous Windows VistaDocument4 pagesModifications Sous Windows Vistahaythem jameiPas encore d'évaluation
- Installation D'une Nouvelle LibrairieDocument5 pagesInstallation D'une Nouvelle Librairiehaythem jameiPas encore d'évaluation
- Aide XRelais 06 - XSymbole FacileDocument10 pagesAide XRelais 06 - XSymbole Facilehaythem jameiPas encore d'évaluation
- Aide XRelais 04 - Les Références CroiséesDocument10 pagesAide XRelais 04 - Les Références Croiséeshaythem jameiPas encore d'évaluation
- Xrelais FacileDocument31 pagesXrelais FacileMakrani BrahimPas encore d'évaluation
- AnalyseDocument4 pagesAnalysehaythem jameiPas encore d'évaluation
- Étude de ChoixDocument14 pagesÉtude de Choixhaythem jameiPas encore d'évaluation
- Aide XRelais 03 - Modifier Un NuméroDocument2 pagesAide XRelais 03 - Modifier Un Numérohaythem jameiPas encore d'évaluation
- TD1 - Transformée de LaplaceDocument2 pagesTD1 - Transformée de Laplacehaythem jameiPas encore d'évaluation
- Correction TD1 - Exercice 2Document1 pageCorrection TD1 - Exercice 2haythem jameiPas encore d'évaluation
- Analyse FonctionneleDocument9 pagesAnalyse Fonctionnelehaythem jameiPas encore d'évaluation
- Lettre de MotivationDocument1 pageLettre de Motivationhaythem jameiPas encore d'évaluation
- Correction TD1 - Exercice4Document5 pagesCorrection TD1 - Exercice4haythem jameiPas encore d'évaluation
- Correction TD1 - Exercice3Document2 pagesCorrection TD1 - Exercice3haythem jameiPas encore d'évaluation
- Diagramme RetourDocument5 pagesDiagramme Retourhaythem jameiPas encore d'évaluation
- Colonnes SechesDocument2 pagesColonnes SechesHdia FayçalPas encore d'évaluation
- TP 1 Organisation Du TravailDocument3 pagesTP 1 Organisation Du TravailZouhair BahajPas encore d'évaluation
- Catalogue Sem SoudageDocument20 pagesCatalogue Sem SoudagechelarucosminPas encore d'évaluation
- Série 1Document5 pagesSérie 1Ţhę JåşPas encore d'évaluation
- Rapport Technique - Fiche de Renseignements Du Constructeur Sandweiler, Le 01 Décembre 2015Document41 pagesRapport Technique - Fiche de Renseignements Du Constructeur Sandweiler, Le 01 Décembre 2015Владислав ДубинаPas encore d'évaluation
- F110a 0Document16 pagesF110a 0Professional TrustPas encore d'évaluation
- Instructions Tipi en FrancaisDocument3 pagesInstructions Tipi en FrancaisJacques FelisatPas encore d'évaluation
- Catalogue Tecno Plastic GF 2022Document61 pagesCatalogue Tecno Plastic GF 2022anx0Pas encore d'évaluation
- 1TXH000592C0301 - Catalogue - GSB - 2019 - CopieDocument64 pages1TXH000592C0301 - Catalogue - GSB - 2019 - CopieChrist Rodney MAKANAPas encore d'évaluation
- 11 ETA F06.111: Information Habillage Fabrikanten Information Manufacturing InformationDocument12 pages11 ETA F06.111: Information Habillage Fabrikanten Information Manufacturing InformationleonardseniorPas encore d'évaluation
- 1 Installations Electriques-1Document20 pages1 Installations Electriques-1AkiraPas encore d'évaluation
- Férraillage Réseau Longrines PDFDocument36 pagesFérraillage Réseau Longrines PDFcheikh seyePas encore d'évaluation
- TD ElectroDocument6 pagesTD ElectroHouda BourimechPas encore d'évaluation
- Adjoint Technique de ChantiersDocument2 pagesAdjoint Technique de ChantiersSanogo HamedPas encore d'évaluation
- 1.1 Ue Fgi Mas 528Document28 pages1.1 Ue Fgi Mas 528watsopPas encore d'évaluation
- Tableau de Bord Gestion de Projet 5 CadransDocument17 pagesTableau de Bord Gestion de Projet 5 CadransSAINT YVES SECOND100% (1)
- In5208 00 - FR FRDocument3 pagesIn5208 00 - FR FRSaid FadilPas encore d'évaluation
- Pont Dalle en Béton Armé. Dalle en Béton Armé LES PONTS. Illustration Des Défauts 1Document33 pagesPont Dalle en Béton Armé. Dalle en Béton Armé LES PONTS. Illustration Des Défauts 1basssemPas encore d'évaluation
- Dimensionnement TransformateurDocument1 pageDimensionnement TransformateurWalid YahiaouiPas encore d'évaluation
- 10.1.903-1friabilité Du SableDocument9 pages10.1.903-1friabilité Du SableRabie SouidiPas encore d'évaluation
- Const-Mixte Organigramme Flex LongDocument40 pagesConst-Mixte Organigramme Flex LongxangPas encore d'évaluation
- Projet 3Document14 pagesProjet 3BELSPas encore d'évaluation
- Stage OuvrierDocument23 pagesStage OuvrierMhadheb Med AminePas encore d'évaluation
- TD 2 Cde Syst ElecDocument15 pagesTD 2 Cde Syst ElecIslam SadadouPas encore d'évaluation
- Reseau TriphaseDocument7 pagesReseau Triphasecours importantPas encore d'évaluation
- Service Manual FRDocument52 pagesService Manual FRNiels De CosterPas encore d'évaluation
- Mesurer-Une-Porte 1Document9 pagesMesurer-Une-Porte 1thierry vivaldaPas encore d'évaluation