Vous aimerez peut-être aussi
- TD3 Tri de Caisses - Modes de Marche - CorrigéDocument8 pagesTD3 Tri de Caisses - Modes de Marche - CorrigéAsmaa Kouhail100% (3)
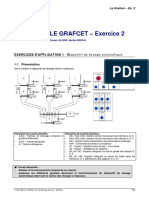
- Grafcet ExerciceDocument2 pagesGrafcet ExerciceKhaled Ouni33% (3)
- Gazette 50 09-2016Document32 pagesGazette 50 09-2016Institut.Albert1Pas encore d'évaluation
- Aii3-Api-Dm-02 2020Document3 pagesAii3-Api-Dm-02 2020Ossama AmmariPas encore d'évaluation
- Gemma 2020Document38 pagesGemma 2020Fifi La MarionnettePas encore d'évaluation
- Fichier 09-09-05!04!32-36 Presentation GemmaDocument34 pagesFichier 09-09-05!04!32-36 Presentation GemmacarolugoPas encore d'évaluation
- GEMMADocument8 pagesGEMMAKOUADIO PATRICEPas encore d'évaluation
- CC - Automatisme Licence IIA-2024Document6 pagesCC - Automatisme Licence IIA-2024Leroy Lionel SonfackPas encore d'évaluation
- 10 MajoriccDocument22 pages10 MajoriccKaziiLaggounPas encore d'évaluation
- Controle Final Automatique Et Info - IndustrielleDocument4 pagesControle Final Automatique Et Info - Industrielleالحمد للهPas encore d'évaluation
- Cours Gemma 21Document95 pagesCours Gemma 21youssef badanePas encore d'évaluation
- 4 GemmaDocument6 pages4 GemmaSerge RINAUDOPas encore d'évaluation
- InfoIndus Ch5 GEMMA 151121Document28 pagesInfoIndus Ch5 GEMMA 151121Šīmő MøhămĕđPas encore d'évaluation
- EXERCICES GRAFCET-Tle F1D - PROFDocument5 pagesEXERCICES GRAFCET-Tle F1D - PROFgildas assoumou allogoPas encore d'évaluation
- Api GemmaDocument6 pagesApi GemmaHanen AbdelmoulaPas encore d'évaluation
- 6 GemmaDocument5 pages6 GemmaSerge RINAUDOPas encore d'évaluation
- Grafcets Ravoux Module 2Document12 pagesGrafcets Ravoux Module 2youri594900% (1)
- GénéralDocument56 pagesGénéralChanol NoupaPas encore d'évaluation
- Note Application 4046Document15 pagesNote Application 4046koozi mozziPas encore d'évaluation
- Le Grafcet Cours 2Document84 pagesLe Grafcet Cours 2naciri66Pas encore d'évaluation
- Chapitre 4Document29 pagesChapitre 4Mouni TadjerPas encore d'évaluation
- 223 Pneumatique Tom1Document16 pages223 Pneumatique Tom1KhawlaManaaPas encore d'évaluation
- Approche Fonctionnelle D Un Automatisme 3-HergliDocument11 pagesApproche Fonctionnelle D Un Automatisme 3-HergliOussamaPas encore d'évaluation
- TP Api1-5 S7-200 Poste DechargementDocument6 pagesTP Api1-5 S7-200 Poste DechargementJawher SalemPas encore d'évaluation
- TP3 Automatismes 22 23 VFDocument4 pagesTP3 Automatismes 22 23 VFMahmoud ChiboubPas encore d'évaluation
- Traitement SurfaceDocument10 pagesTraitement SurfaceKhaled OuniPas encore d'évaluation
- EXERCICES GRAFCET-Tle F1D - PROFDocument5 pagesEXERCICES GRAFCET-Tle F1D - PROFgildas assoumou allogoPas encore d'évaluation
- Manuel Des Plug-In de Commande Des Moteurs Du Robot L6201Document10 pagesManuel Des Plug-In de Commande Des Moteurs Du Robot L6201Sofiane AltairPas encore d'évaluation
- Automatisme GemmaDocument7 pagesAutomatisme GemmaOUSKRIPas encore d'évaluation
- Grafcets Module 1Document14 pagesGrafcets Module 1stef zziPas encore d'évaluation
- 08-09 SI CI11 Synthese Cours GEMMADocument6 pages08-09 SI CI11 Synthese Cours GEMMATaoufiqBaouchPas encore d'évaluation
- Le Gemma V2 20 04 21Document12 pagesLe Gemma V2 20 04 21Phenix PhenixPas encore d'évaluation
- G7 Ex1 Poste DchargDocument2 pagesG7 Ex1 Poste DchargTS AUTOMATISATIONPas encore d'évaluation
- Cours GEMMA 11 12Document12 pagesCours GEMMA 11 12Alƴ ƁƴPas encore d'évaluation
- Grafcets Module 1Document14 pagesGrafcets Module 1youri59490Pas encore d'évaluation
- Chp5 AutomatismeDocument12 pagesChp5 AutomatismeAbdl Karim Ben AchourPas encore d'évaluation
- Devoir Surveillé Autom2 2022Document8 pagesDevoir Surveillé Autom2 2022Aftaab H. RaheemanPas encore d'évaluation
- 18 Le GEMMADocument8 pages18 Le GEMMAOssama DraouiPas encore d'évaluation
- Grafcet E1Document19 pagesGrafcet E1Radouan SahbPas encore d'évaluation
- Approche Externe de L'analyse Fonctionnelle: Etude Des Différents Systèmes de CommandeDocument5 pagesApproche Externe de L'analyse Fonctionnelle: Etude Des Différents Systèmes de CommandeYoussef SadikPas encore d'évaluation
- TD65 03 Commande AscenseurDocument5 pagesTD65 03 Commande AscenseurSafae BhjPas encore d'évaluation
- Chapitre 6Document32 pagesChapitre 6fatima zahra ettalhyPas encore d'évaluation
- Support de Cours - Chap6-GemmaDocument18 pagesSupport de Cours - Chap6-GemmahajarPas encore d'évaluation
- TP Tia PortaleDocument19 pagesTP Tia PortaleMustafa Semmaa80% (5)
- TP - Monte Charges 3 NiveauxDocument4 pagesTP - Monte Charges 3 NiveauxSmail HammichePas encore d'évaluation
- 8 - 1 - PPS - GemmaDocument34 pages8 - 1 - PPS - GemmaBrayane MboumbaPas encore d'évaluation
- Proramation Des ProcessusDocument2 pagesProramation Des ProcessusNidhal CherratPas encore d'évaluation
- Bva HidroconvertiseurDocument15 pagesBva Hidroconvertiseurmihai_1957Pas encore d'évaluation
- 1 Systeme Sequentiels Eleve GrafcetDocument8 pages1 Systeme Sequentiels Eleve GrafcetAhmed BelhadjPas encore d'évaluation
- Cahier Des Charges EtiqueteuseeDocument4 pagesCahier Des Charges EtiqueteuseeGrace DuguinePas encore d'évaluation
- Grafcet 4Document10 pagesGrafcet 4Khaled OuniPas encore d'évaluation
- CH4 Ai 20 21Document4 pagesCH4 Ai 20 21Chams HajjiPas encore d'évaluation
- GemmaDocument8 pagesGemmaTAHA YASSINEPas encore d'évaluation
- 3436A (1) NT Jauge PKDocument1 page3436A (1) NT Jauge PKjpgPas encore d'évaluation
- GemmaDocument8 pagesGemmaCHAKER Mohammed MouncifPas encore d'évaluation
- Examens de Fin de Formation TS ESA 2007 Pratique Tous Les Variantes WWW Cours-Electromecanique ComDocument25 pagesExamens de Fin de Formation TS ESA 2007 Pratique Tous Les Variantes WWW Cours-Electromecanique ComSamir2020100% (1)
- Automatism Eel TDocument30 pagesAutomatism Eel TSam SALIFOUPas encore d'évaluation
- Revue Environnement Pcs-AgDocument10 pagesRevue Environnement Pcs-Agcours d'électricitéPas encore d'évaluation
- 5 BesoinsDocument20 pages5 Besoinscours d'électricitéPas encore d'évaluation
- 4 Capacité ChargeDocument17 pages4 Capacité Chargecours d'électricitéPas encore d'évaluation
- Chapitre 1Document41 pagesChapitre 1cours d'électricitéPas encore d'évaluation
- Chapitre 3 - 1Document62 pagesChapitre 3 - 1cours d'électricitéPas encore d'évaluation
- Chapitre 5Document32 pagesChapitre 5cours d'électricitéPas encore d'évaluation
- Amplificateur D'instrumentationDocument10 pagesAmplificateur D'instrumentationTahar BenaissaPas encore d'évaluation
- Chapitre 3 - 2Document42 pagesChapitre 3 - 2cours d'électricitéPas encore d'évaluation
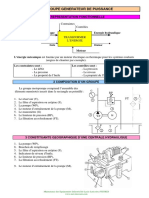
- Centrale HydrauliqueDocument3 pagesCentrale Hydrauliquecours d'électricitéPas encore d'évaluation
- Guide Technique EquitoneDocument76 pagesGuide Technique EquitonesoufianPas encore d'évaluation
- Colon Et Rectum PDFDocument10 pagesColon Et Rectum PDFLAHLOU KHALIDPas encore d'évaluation
- L'impact de La Covid-19 Sur L'économie MarocaineDocument17 pagesL'impact de La Covid-19 Sur L'économie MarocainePaolo VelasquezPas encore d'évaluation
- Cahier Pratique - Rationalisation des qualifications périodiques des autoclaves, des tunnels de dépyrogénation et des laveuses de flacons pour les formes injectables - A3P - Industrie Pharmaceutique & BioteDocument9 pagesCahier Pratique - Rationalisation des qualifications périodiques des autoclaves, des tunnels de dépyrogénation et des laveuses de flacons pour les formes injectables - A3P - Industrie Pharmaceutique & Bioteghofrane ezzinePas encore d'évaluation
- Guide Bonnes Pratiques Restauration MiniereDocument79 pagesGuide Bonnes Pratiques Restauration Minierekhadijasaadlah74Pas encore d'évaluation
- Défauts de Revêtement, Enfoncements, Corrosions, Rayures, Fissures Défauts de ConstructionDocument15 pagesDéfauts de Revêtement, Enfoncements, Corrosions, Rayures, Fissures Défauts de ConstructionGil-Alain EgnakouPas encore d'évaluation
- Echos de La MicronutritionDocument8 pagesEchos de La Micronutritionanis100% (1)
- Stok 1702 U 16-02-17Document28 pagesStok 1702 U 16-02-17Anonymous 033nNeepX1Pas encore d'évaluation
- EN ISO 16276-2 (2007) (E) Codified PDFDocument5 pagesEN ISO 16276-2 (2007) (E) Codified PDFArmando ArredondoPas encore d'évaluation
- Edition PecDocument2 pagesEdition Pecnicolas carittePas encore d'évaluation
- ZinaDocument1 pageZinaSidiki MillimonoPas encore d'évaluation
- FicheTox 4Document11 pagesFicheTox 4Ness KhelalfaPas encore d'évaluation
- Chapitre 4 Les Vegetaux Ont Des Besoins AlimentairesDocument5 pagesChapitre 4 Les Vegetaux Ont Des Besoins AlimentairesBlink123123Pas encore d'évaluation
- VMA FC Et TestsDocument19 pagesVMA FC Et Tests547035 BLANC MESNIL SP.F. BPas encore d'évaluation
- Projet LundiDocument64 pagesProjet LundiD IMPas encore d'évaluation
- Chaudières Et Fours IndustrielsDocument102 pagesChaudières Et Fours Industrielsrymaachouri83% (6)
- La Pauvretã© Dans Le Monde  " Cours  " 5à Me  " Géographie PDFDocument4 pagesLa Pauvretã© Dans Le Monde  " Cours  " 5à Me  " Géographie PDFAnonymous Nt9DS0etIxPas encore d'évaluation
- AUTISME V Interactif 2018Document72 pagesAUTISME V Interactif 2018Mezni100% (1)
- Chapitre 3Document27 pagesChapitre 3hamza zouhairPas encore d'évaluation
- Curriculum Vitae de Ezzeddine M'barekDocument5 pagesCurriculum Vitae de Ezzeddine M'barekezmb3000Pas encore d'évaluation
- Intoxication Par Le ParacetamolDocument7 pagesIntoxication Par Le Paracetamolomar elhamdaouiPas encore d'évaluation
- Vários - Autrepart - #19 - VariationsDocument202 pagesVários - Autrepart - #19 - VariationsDiego MarquesPas encore d'évaluation
- Oeil RougeDocument16 pagesOeil RougeDolande BOUKAPas encore d'évaluation
- Traitement de Glissement Des Routes PfeDocument168 pagesTraitement de Glissement Des Routes PfenadihPas encore d'évaluation
- Chimie KamlaDocument5 pagesChimie KamlaKhawla El HamdaouiPas encore d'évaluation
- Mémoire de Fin D'étudesDocument180 pagesMémoire de Fin D'étudesWiwi Besma100% (2)
- 13-Chemot ADocument2 pages13-Chemot AIsandro Ojeda-GarcíaPas encore d'évaluation
- Les Legumes Exercices Et CorrigeDocument4 pagesLes Legumes Exercices Et CorrigeMarius Iulian100% (1)
- Cours PPT 5 - L'air Qui Nous EntoureDocument9 pagesCours PPT 5 - L'air Qui Nous EntoureŸøüs Sëf100% (1)