Vous aimerez peut-être aussi
- QCM Départ Moteur ÉlèveDocument4 pagesQCM Départ Moteur Élèvebousnina100% (1)
- Chapitre 3 - Equilibrage DynamiqueDocument10 pagesChapitre 3 - Equilibrage DynamiqueSayf Bouyedda100% (1)
- ++TD #4 - Dispersions en UsinageDocument4 pages++TD #4 - Dispersions en UsinageRayen AbPas encore d'évaluation
- Equilibrage Des Machines TournantesDocument8 pagesEquilibrage Des Machines TournantesSam Dallali100% (6)
- QCM - Ued PMP - UsinageDocument23 pagesQCM - Ued PMP - Usinageanthony duboisPas encore d'évaluation
- 08 - TD Lois D'usure + CorrigéDocument4 pages08 - TD Lois D'usure + CorrigéJean-Luc Colussi100% (2)
- 24 - TDs - Analyse Vibratoire PDFDocument10 pages24 - TDs - Analyse Vibratoire PDFDivin MakitaPas encore d'évaluation
- 5emeP1SP0Ch3T5 Station EpurationDocument3 pages5emeP1SP0Ch3T5 Station Epurationbousnina75% (4)
- Protection Cathodique PDFDocument80 pagesProtection Cathodique PDFMohamed Rjeb85% (13)
- La Sécurité Informatique Dans La Petite Entreprise (WWW - Videos-Formation - Org)Document153 pagesLa Sécurité Informatique Dans La Petite Entreprise (WWW - Videos-Formation - Org)Paul Bismuth100% (1)
- Equilibrage Des Machines TournantesDocument8 pagesEquilibrage Des Machines Tournantessoumia kaddourPas encore d'évaluation
- I Vibratoires Des Principaux Defauts PDFDocument10 pagesI Vibratoires Des Principaux Defauts PDFChokri AtefPas encore d'évaluation
- Chapitre 2 - Equilibrage StatiqueDocument10 pagesChapitre 2 - Equilibrage StatiqueSayf Bouyedda100% (1)
- Surveillance VibratoireDocument41 pagesSurveillance VibratoireAnis MraihiPas encore d'évaluation
- Chapitre 2-Analyse VibratoireDocument13 pagesChapitre 2-Analyse Vibratoirebenissaad1959Pas encore d'évaluation
- Introduction La Dynamique Des RotorsDocument12 pagesIntroduction La Dynamique Des RotorsSEIFEDDINE KADRIPas encore d'évaluation
- CHP 3 Analyse Vibratoire 2020Document52 pagesCHP 3 Analyse Vibratoire 2020Maram Sellami100% (1)
- CR TPDocument4 pagesCR TPanass anasPas encore d'évaluation
- Equilibrage Dynamique PDFDocument3 pagesEquilibrage Dynamique PDFMustafa MoussaouiPas encore d'évaluation
- Chapitrei AV1 2018Document51 pagesChapitrei AV1 2018YassineZklPas encore d'évaluation
- Surveillance VibratoireDocument84 pagesSurveillance VibratoireNari MenePas encore d'évaluation
- Examen de Rattrapage Exercice N°1 (6pts)Document1 pageExamen de Rattrapage Exercice N°1 (6pts)Tôha Maïga100% (1)
- Chapitre 4-Dynamique Des Rotors en TorstionDocument16 pagesChapitre 4-Dynamique Des Rotors en TorstionToksik MaddePas encore d'évaluation
- Solution: Examen Final de Dynamique Des Machines TournantesDocument2 pagesSolution: Examen Final de Dynamique Des Machines TournantesAymen Khalfaoui50% (2)
- CHAPITRE 2 Dynamique Des Rotors en FlexionDocument14 pagesCHAPITRE 2 Dynamique Des Rotors en FlexionkokouPas encore d'évaluation
- Dynamique de Machines TournantesDocument67 pagesDynamique de Machines TournantesTôha MaïgaPas encore d'évaluation
- Equilibrage Statique Et Dynamique Des Machines RotativesDocument9 pagesEquilibrage Statique Et Dynamique Des Machines RotativesKader DziriPas encore d'évaluation
- Examen de Rattrapage de Dynamique Des Machines TournantesDocument1 pageExamen de Rattrapage de Dynamique Des Machines TournantesTôha Maïga100% (1)
- TD1 Machines TournantesDocument4 pagesTD1 Machines TournantesMeddour Belkacem67% (6)
- TD Surveillance VibratoireDocument8 pagesTD Surveillance Vibratoirezied ktari100% (6)
- Examen ANALYSE DES HUILESDocument3 pagesExamen ANALYSE DES HUILESleaw81Pas encore d'évaluation
- Méthode D'alignement Des ArbresDocument9 pagesMéthode D'alignement Des ArbresAbdoul Aziz ROAMBAPas encore d'évaluation
- Mesure Vibratoire en Niveau Global PDFDocument7 pagesMesure Vibratoire en Niveau Global PDFPatrick BeniePas encore d'évaluation
- ExamenDocument8 pagesExamenMOUNIR FRIJA100% (1)
- Efforts Sur Les EngrenagesDocument2 pagesEfforts Sur Les EngrenagesMahrez ZaafouriPas encore d'évaluation
- TD Analyse VibratoireDocument1 pageTD Analyse VibratoireSofiane100% (1)
- Bac SSI 2009 Actionneur Commande Vol A380Document34 pagesBac SSI 2009 Actionneur Commande Vol A380kingofdarkness2010Pas encore d'évaluation
- TD N°2 Maintenance - CNDDocument2 pagesTD N°2 Maintenance - CNDHB RIMPas encore d'évaluation
- Projet de Fin D'étude Réducteur de VitesseDocument73 pagesProjet de Fin D'étude Réducteur de VitesseAbdellah MazziPas encore d'évaluation
- Calcul Des Roulements 2Document11 pagesCalcul Des Roulements 2NeoXana01Pas encore d'évaluation
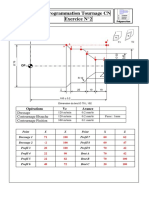
- Exercice N°2 - Programmation Partie Tounage CN - CorrectionDocument2 pagesExercice N°2 - Programmation Partie Tounage CN - CorrectionAymen GmarPas encore d'évaluation
- Analyse Des Contraintes D'anterioritesDocument1 pageAnalyse Des Contraintes D'anterioritesazer kizerPas encore d'évaluation
- TP-Fraisage 13 12 2016Document7 pagesTP-Fraisage 13 12 2016Nadir Hamel100% (2)
- BDE04 Analyse Vibratoire BalourdDocument16 pagesBDE04 Analyse Vibratoire Balourdblues1997100% (2)
- ExamDocument3 pagesExamNaoufel FaresPas encore d'évaluation
- Dimensionnement D'un Arbre en Torsion, Dimensionnement Du Module - 2017 - V2Document5 pagesDimensionnement D'un Arbre en Torsion, Dimensionnement Du Module - 2017 - V2Nabil Ait BrahimPas encore d'évaluation
- Equilibrage Des Machines Tournantes V15Document20 pagesEquilibrage Des Machines Tournantes V15Belalia100% (1)
- Chapitre 2 DYNAMIQUE DES MACHINESDocument41 pagesChapitre 2 DYNAMIQUE DES MACHINESHana Hosni100% (1)
- Compte Rendu:: Influence Des Paramètres de Coupe Sur L'état de SurfaceDocument10 pagesCompte Rendu:: Influence Des Paramètres de Coupe Sur L'état de SurfaceFerchichi HajerPas encore d'évaluation
- TD Vibration en Torsion Des ArbresDocument4 pagesTD Vibration en Torsion Des ArbresAboubacar Sidiki TangaraPas encore d'évaluation
- Dynam Mach Tourn v2 PDFDocument67 pagesDynam Mach Tourn v2 PDFMeddour Belkacem100% (1)
- Rapport Finale PDFDocument100 pagesRapport Finale PDFOussema ElloumiPas encore d'évaluation
- TP TribologieDocument9 pagesTP TribologieRabab RimPas encore d'évaluation
- 06 MECA0444-ArbresIDocument49 pages06 MECA0444-ArbresIElmehdi ElmessaoudiPas encore d'évaluation
- Equilibrage Et Alignement Des MachinesDocument79 pagesEquilibrage Et Alignement Des MachinesWalid BelaaziPas encore d'évaluation
- Efforts Et Puisance de CoupeDocument7 pagesEfforts Et Puisance de CoupeAnouarPas encore d'évaluation
- TD N°16 Train Épicycloïdal CorrectionDocument14 pagesTD N°16 Train Épicycloïdal Correctionybenguenny100% (1)
- CH17 - Pompe Centrifuge ÉquilibrageDocument57 pagesCH17 - Pompe Centrifuge ÉquilibrageSarra BÉCHIRI100% (2)
- 8 - EngrenageyhkDocument62 pages8 - EngrenageyhkFédyHamdiPas encore d'évaluation
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- Fiabilité, maintenance prédictive et vibration des machinesD'EverandFiabilité, maintenance prédictive et vibration des machinesPas encore d'évaluation
- Expose D'analyse Vibrato IreDocument20 pagesExpose D'analyse Vibrato IrePatrice Mczeo100% (3)
- 8 Chapitre III Etude Des Principaux DéfautsDocument21 pages8 Chapitre III Etude Des Principaux DéfautsalexdavidnparkerPas encore d'évaluation
- Etude Des Principaux DéfautsDocument31 pagesEtude Des Principaux DéfautsKo Kito100% (1)
- Loi #94-28 Du 21 Février 1994, Régime ATMPDocument12 pagesLoi #94-28 Du 21 Février 1994, Régime ATMPbousninaPas encore d'évaluation
- Références Réglementaires Tunisiennes, Ex DR Mahjoub, GénéralesDocument7 pagesRéférences Réglementaires Tunisiennes, Ex DR Mahjoub, GénéralesbousninaPas encore d'évaluation
- Coso PDFDocument15 pagesCoso PDFMariamabPas encore d'évaluation
- These - Iso 9001 - v2015 PDFDocument81 pagesThese - Iso 9001 - v2015 PDFbousnina100% (1)
- Décret N° 2006-2687 (Ouverture& Exploitation Entreprise Classé)Document12 pagesDécret N° 2006-2687 (Ouverture& Exploitation Entreprise Classé)bousninaPas encore d'évaluation
- Arrete Du 06 09 2012Document8 pagesArrete Du 06 09 2012bousninaPas encore d'évaluation
- Procedure Expert AuditeurDocument7 pagesProcedure Expert AuditeurbousninaPas encore d'évaluation
- SmedDocument33 pagesSmedKamal MefPas encore d'évaluation
- 01 FR MaintenanceDocument25 pages01 FR MaintenancebousninaPas encore d'évaluation
- Présentation de L'audit Énergétique Par M Néji AMAIMIA, Expert PCAMDocument21 pagesPrésentation de L'audit Énergétique Par M Néji AMAIMIA, Expert PCAMbousninaPas encore d'évaluation
- Gestion de Production22Document10 pagesGestion de Production22bendjillali youcefPas encore d'évaluation
- SKF LubrifiantDocument162 pagesSKF Lubrifiantbousnina100% (1)
- FR - La Maintenance Industrielle en TunisieDocument21 pagesFR - La Maintenance Industrielle en TunisiebousninaPas encore d'évaluation
- 2 - RCPS Etapes 1,2 Et 3Document49 pages2 - RCPS Etapes 1,2 Et 3Amine SebbaniPas encore d'évaluation
- Continental Collection M2 CertificateDocument1 pageContinental Collection M2 CertificateLilian IbimarPas encore d'évaluation
- Study Plan ENSTA Borj Cedria - SICDocument1 pageStudy Plan ENSTA Borj Cedria - SICTunENSTABPas encore d'évaluation
- Pfe ChuDocument136 pagesPfe ChuSoufianeSbihiPas encore d'évaluation
- Staub 5000 6000 6200 6500 7000 PiècesDocument53 pagesStaub 5000 6000 6200 6500 7000 PiècesNicolas NicolasPas encore d'évaluation
- Adresses SociétésDocument19 pagesAdresses SociétésAssiaAsrPas encore d'évaluation
- Plan Etudes Genie Mécanique PDFDocument16 pagesPlan Etudes Genie Mécanique PDFBaklouti WaelPas encore d'évaluation
- Conditions Generales Auto Direct AssuranceDocument35 pagesConditions Generales Auto Direct AssuranceMa GaPas encore d'évaluation
- Fiche Technique Des Clous X ENP Fiche Technique ASSET DOC LOC 2036466Document4 pagesFiche Technique Des Clous X ENP Fiche Technique ASSET DOC LOC 2036466FardiniPas encore d'évaluation
- Bac Pro Logistique 2016 Sujet Metropole LDCDocument20 pagesBac Pro Logistique 2016 Sujet Metropole LDCVortexPas encore d'évaluation
- Valve TroubleshootingDocument10 pagesValve Troubleshootingvista10Pas encore d'évaluation
- UML Cas D'utilisationDocument2 pagesUML Cas D'utilisationHildweigPas encore d'évaluation
- M22462 Formation Administrer Une Base de Donnees Microsoft SQL Server 2012 PDFDocument2 pagesM22462 Formation Administrer Une Base de Donnees Microsoft SQL Server 2012 PDFCertyouFormationPas encore d'évaluation
- MANUEL - 14xTPF - 25.07.2012Document106 pagesMANUEL - 14xTPF - 25.07.2012Анатолий РябухаPas encore d'évaluation
- TE 05 Les Outile D'electDocument126 pagesTE 05 Les Outile D'electapi-3798235Pas encore d'évaluation
- Construire Un GazaileDocument26 pagesConstruire Un GazaileDocBeesPas encore d'évaluation
- Mini Projet TCEDocument9 pagesMini Projet TCEwassila boulichePas encore d'évaluation
- Rossi Motoreducteurs Planetaires EP10 SP F PDFDocument188 pagesRossi Motoreducteurs Planetaires EP10 SP F PDFosman choque rojasPas encore d'évaluation
- Etude Du Cas de Zara-1Document40 pagesEtude Du Cas de Zara-1Anthony Oulé100% (2)
- La Méthode MERISE:Les Formes Normales: Hassan OUAHIDocument14 pagesLa Méthode MERISE:Les Formes Normales: Hassan OUAHIAyoub BenkhadajPas encore d'évaluation
- Cahiers Des ChargesDocument72 pagesCahiers Des ChargesAli BoubeniaPas encore d'évaluation
- Filière D'excellence IC BTP-FSSM 2023Document1 pageFilière D'excellence IC BTP-FSSM 2023saidPas encore d'évaluation
- Workspace Nafa TestDocument1 pageWorkspace Nafa Testggm2lokoPas encore d'évaluation
- Bombe A Mano FrancesiDocument2 pagesBombe A Mano Francesiroberto portoPas encore d'évaluation
- Gestion Des Flux - Activité D'auto-ÉvaluationDocument3 pagesGestion Des Flux - Activité D'auto-ÉvaluationNajahi YoussefPas encore d'évaluation
- 54 A 81 Ec 73 Deb 6Document35 pages54 A 81 Ec 73 Deb 6Nada Ben El HoussainPas encore d'évaluation
- MethodeD'Essai LCPC ME40 (1994)Document15 pagesMethodeD'Essai LCPC ME40 (1994)Geotech NicalPas encore d'évaluation