Vous aimerez peut-être aussi
- Correction TD MecaniqueDocument4 pagesCorrection TD MecaniquezakariaelhjamPas encore d'évaluation
- DM - Magnetisme AtomiqueDocument71 pagesDM - Magnetisme AtomiqueNawres AbbessiPas encore d'évaluation
- CNC 2008 MP Physique 2 CorrigeDocument17 pagesCNC 2008 MP Physique 2 CorrigeSara SerboutPas encore d'évaluation
- Phys Fiches PDFDocument23 pagesPhys Fiches PDFazzamPas encore d'évaluation
- CNC Tsi Physique2 2016cDocument6 pagesCNC Tsi Physique2 2016cOussama ChoukerPas encore d'évaluation
- corrTD13 2017Document4 pagescorrTD13 2017BOURAS Ihabe - بوراس إيهابPas encore d'évaluation
- Examens Corr MecDocument7 pagesExamens Corr MecKhalid ZegPas encore d'évaluation
- Cours Meca 2021Document8 pagesCours Meca 2021WilliamPas encore d'évaluation
- Corrige 2Document6 pagesCorrige 2Amin TaamouchPas encore d'évaluation
- Exercice 6 - TD 6 V3Document2 pagesExercice 6 - TD 6 V3Adoum Mahamat AbbasPas encore d'évaluation
- CH 6 Ref Non GalileenDocument3 pagesCH 6 Ref Non GalileenMonkey D luffyPas encore d'évaluation
- Sol 1Document12 pagesSol 1SafaePas encore d'évaluation
- 7résumé 1 Du Mécanique Du SolideDocument8 pages7résumé 1 Du Mécanique Du SolidehajarPas encore d'évaluation
- CNC 2017 Physique 1 Corrigé 2Document13 pagesCNC 2017 Physique 1 Corrigé 2Mourad LkPas encore d'évaluation
- CCP 2014 CorrectionDocument8 pagesCCP 2014 CorrectionNasr eddine GuellafPas encore d'évaluation
- 3 Polycop Cours Analyse VectorielleDocument2 pages3 Polycop Cours Analyse Vectoriellenassimsb27Pas encore d'évaluation
- OMP2022 ET SujetbDocument2 pagesOMP2022 ET SujetbJeremDxPas encore d'évaluation
- Rec 3 - Mécanique Du SolideDocument4 pagesRec 3 - Mécanique Du Solideh gPas encore d'évaluation
- TD4Document5 pagesTD4juniorPas encore d'évaluation
- Mouvement D'une Masse Glissant Sur Un Cylindre: Si Et Seulement Si ADocument1 pageMouvement D'une Masse Glissant Sur Un Cylindre: Si Et Seulement Si AFaical BharPas encore d'évaluation
- Chapitre 3 La Solution Générale Des Équations de Maxwell: Les Potentiels RetardésDocument10 pagesChapitre 3 La Solution Générale Des Équations de Maxwell: Les Potentiels RetardésMatchnov Taa Kanga AssouaPas encore d'évaluation
- Exotype 49Document5 pagesExotype 49micipsa AhwaouiPas encore d'évaluation
- New PolaireDocument4 pagesNew PolaireAGUERJA DOUHAPas encore d'évaluation
- Ravaux Irigés De: Exercice 1Document10 pagesRavaux Irigés De: Exercice 1Ahmed El Emir Akkah Akkah100% (1)
- Ravaux Irigés De: Exercice 1Document9 pagesRavaux Irigés De: Exercice 1sage blanqui nzaou100% (1)
- Chap1 1 Electrostatique TD CorrectionDocument2 pagesChap1 1 Electrostatique TD Correctioncours importantPas encore d'évaluation
- CF 14-15 MaDocument2 pagesCF 14-15 MaadilbourejylahPas encore d'évaluation
- CH 5 Forces CentralesDocument6 pagesCH 5 Forces CentralesMonkey D luffyPas encore d'évaluation
- TD Corrigé Magnétostatique 34 1Document1 pageTD Corrigé Magnétostatique 34 1nathanPas encore d'évaluation
- Universite Pierre Et Marie CurieDocument3 pagesUniversite Pierre Et Marie Curiebelhagemohamad61Pas encore d'évaluation
- td5 Potentiel DensitéDocument4 pagestd5 Potentiel DensitéToche Tala Martial FranckPas encore d'évaluation
- CC2 Mastermecaflu 1819 CorrigéDocument8 pagesCC2 Mastermecaflu 1819 CorrigéFatima Ezzahrae BOUITAPas encore d'évaluation
- Rattrapage Avec Solution - Electronique Fondamentale 2-2015Document3 pagesRattrapage Avec Solution - Electronique Fondamentale 2-2015dhaouadi guizaPas encore d'évaluation
- CC2 Mastermecaflu 1718Document3 pagesCC2 Mastermecaflu 1718Fatima Ezzahrae BOUITAPas encore d'évaluation
- Première Interrogation Écrite: Atm 33, 0 (H) PDocument3 pagesPremière Interrogation Écrite: Atm 33, 0 (H) PAmada TarekPas encore d'évaluation
- Dipole ElectroDocument15 pagesDipole ElectroMohammed EssabbarPas encore d'évaluation
- Laplace Thomas LachanceDocument25 pagesLaplace Thomas LachanceM'pounguiPas encore d'évaluation
- Formulaire Bac1-2020Document1 pageFormulaire Bac1-2020Guillaume RolinPas encore d'évaluation
- ctr1 Sol 22 23Document5 pagesctr1 Sol 22 23pallap palPas encore d'évaluation
- ELECTROSTATIQUEDocument20 pagesELECTROSTATIQUEismailmoudziri7Pas encore d'évaluation
- Cours Analyse VectDocument7 pagesCours Analyse VectGodwinPas encore d'évaluation
- Sol td3Document6 pagesSol td3azzamPas encore d'évaluation
- Corr EX2 TD3 PDocument2 pagesCorr EX2 TD3 PBamishola Aristide LOKEPas encore d'évaluation
- Physique 1 CNC MP 2011 Corrigé 3Document8 pagesPhysique 1 CNC MP 2011 Corrigé 3elhaffarisoumia123Pas encore d'évaluation
- M05 Mouvements Dans Un Champ de Force Centrale ConservatifDocument19 pagesM05 Mouvements Dans Un Champ de Force Centrale ConservatifSohaib LaminePas encore d'évaluation
- Cours Ondes Electromagnetiques Dans Les MilieuxDocument38 pagesCours Ondes Electromagnetiques Dans Les Milieuxlilia Bennaceur FarahPas encore d'évaluation
- Corr - DM Nc2b01 de Mecc81canique de SolideDocument2 pagesCorr - DM Nc2b01 de Mecc81canique de SolideecomechPas encore d'évaluation
- Electrostatique Chap IIIDocument7 pagesElectrostatique Chap IIIKhadim thiamPas encore d'évaluation
- CC Mat 141Document4 pagesCC Mat 141Galand NoahPas encore d'évaluation
- PC 2Document2 pagesPC 2amine dalaaPas encore d'évaluation
- Sol1 17 18Document3 pagesSol1 17 18azzamPas encore d'évaluation
- CorrigeDocument1 pageCorrigeNa JouaPas encore d'évaluation
- A Propos de La Sonde Rosetta. Corrigé de L'épreuveDocument5 pagesA Propos de La Sonde Rosetta. Corrigé de L'épreuveSALAH EDDINE ABBASSIPas encore d'évaluation
- Corrige Physique PC 2022Document4 pagesCorrige Physique PC 2022Lionel MonteiroPas encore d'évaluation
- td1 2016Document2 pagestd1 2016azzamPas encore d'évaluation
- FormulaireDocument3 pagesFormulaireCəvahir AğazadəPas encore d'évaluation
- Corrige DM5 PDFDocument15 pagesCorrige DM5 PDFBrandy OdonnellPas encore d'évaluation
- 2.3 Robot SoudageDocument2 pages2.3 Robot Soudageabdessamad1boussairiPas encore d'évaluation
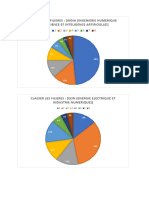
- Classer Les Filieres: (India (Ingenierie Numerique Data Science Et Inteligence Artificielle) )Document5 pagesClasser Les Filieres: (India (Ingenierie Numerique Data Science Et Inteligence Artificielle) )Je IsmailPas encore d'évaluation
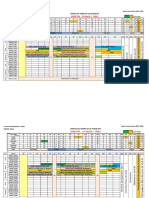
- GI Principale 09-10-2023Document5 pagesGI Principale 09-10-2023Je IsmailPas encore d'évaluation
- Api S3Document6 pagesApi S3Je IsmailPas encore d'évaluation
- Pcsi SiiDocument9 pagesPcsi SiiJe IsmailPas encore d'évaluation
- TD Electrocinetique FDocument2 pagesTD Electrocinetique FJe IsmailPas encore d'évaluation
- Genie BiomedicalDocument4 pagesGenie BiomedicalJe IsmailPas encore d'évaluation
- Demande Consultation de Copie Du CF (1) - 2Document1 pageDemande Consultation de Copie Du CF (1) - 2Je IsmailPas encore d'évaluation
- ds2 2010 11Document1 pageds2 2010 11Je IsmailPas encore d'évaluation
- Dev3 Continuite TviDocument1 pageDev3 Continuite TviJe IsmailPas encore d'évaluation
- CorrectionDocument2 pagesCorrectionJe IsmailPas encore d'évaluation
- ACTIVITE Fonction D Usage-3Document2 pagesACTIVITE Fonction D Usage-3Je IsmailPas encore d'évaluation
- Capteur EX Avec CorigerDocument65 pagesCapteur EX Avec Corigermohamed rissaniPas encore d'évaluation
- 616840357Document12 pages616840357othman0% (1)
- AMDEC Pompe Centrifuge.Document112 pagesAMDEC Pompe Centrifuge.Lionel Trésor MATCHINDJI100% (1)
- I-But de La ManipulationDocument8 pagesI-But de La ManipulationKOUASSIPas encore d'évaluation
- Optique Des Lasers - Et Faisceaux GaussiensDocument48 pagesOptique Des Lasers - Et Faisceaux Gaussienserdoux0% (1)
- Chapitre 2 - Effort TranchantDocument6 pagesChapitre 2 - Effort Tranchantpaogino00Pas encore d'évaluation
- Recueil Exam Meca Flu PDFDocument26 pagesRecueil Exam Meca Flu PDFĶhadija KhadijaPas encore d'évaluation
- Chapitre IIDocument29 pagesChapitre IIfatma.mabroukiPas encore d'évaluation
- Td17 Forces CentralesDocument2 pagesTd17 Forces CentralesAdri Leb100% (1)
- BAII EC2 Chap8 Flexion Composée 2021Document28 pagesBAII EC2 Chap8 Flexion Composée 2021MEHDI KHLIFAPas encore d'évaluation
- Transmission - MVT - Lego BtsDocument3 pagesTransmission - MVT - Lego BtsOmar Rajad100% (1)
- TP Echangeur REKEB NoredineDocument30 pagesTP Echangeur REKEB NoredineOmar AssouPas encore d'évaluation
- Cours MQ SMPCS4 Seance 04 04 2020Document10 pagesCours MQ SMPCS4 Seance 04 04 2020Tahirou FanePas encore d'évaluation
- Les Grandeurs Physiques Liees A La Quantite de Matiere Cours 1Document6 pagesLes Grandeurs Physiques Liees A La Quantite de Matiere Cours 1Mahfoud Natsu67% (3)
- EchographieDocument2 pagesEchographiehf67fxymvnPas encore d'évaluation
- Rapport Meca Flu Jet D EauDocument19 pagesRapport Meca Flu Jet D Eau58305Pas encore d'évaluation
- Manuelle de Cours Sciences de Lingénieur Transmettre Avec Modification Du Couple Et de La VitesseDocument80 pagesManuelle de Cours Sciences de Lingénieur Transmettre Avec Modification Du Couple Et de La VitesseMajda El-aouni100% (4)
- BAEL91 CDocument2 pagesBAEL91 CMehdi KoutaibaPas encore d'évaluation
- Lsa TimetableDocument84 pagesLsa TimetableAkansha AwasthiPas encore d'évaluation
- TD N°02-Vm-20-21Document8 pagesTD N°02-Vm-20-21mahdiPas encore d'évaluation
- Etude Et Calcul D'un BâtimentDocument99 pagesEtude Et Calcul D'un BâtimentBoukhari Hamza83% (23)
- E Chtsi2019Document4 pagesE Chtsi2019hassouiooPas encore d'évaluation
- Chap2. Déplacements Des Poutres FléchiesDocument19 pagesChap2. Déplacements Des Poutres FléchiesBelheziel AekPas encore d'évaluation
- Géophysique ElectromagétiqueDocument20 pagesGéophysique ElectromagétiqueHasna NassifPas encore d'évaluation
- Communales 2018 TS1Document4 pagesCommunales 2018 TS1PFE100% (1)
- FicheC5-3-Guide Auscultation Ouvrage Art-Cahier Interactif IfsttarDocument3 pagesFicheC5-3-Guide Auscultation Ouvrage Art-Cahier Interactif IfsttarImane KhammouriPas encore d'évaluation
- Recalculer Propriété de SectionDocument7 pagesRecalculer Propriété de Sectionmohammed benmostefaPas encore d'évaluation
- Biomécanique - Triade Musculaire PDFDocument14 pagesBiomécanique - Triade Musculaire PDFAyoub KhattabiPas encore d'évaluation
- Électromagnétisme en Régime StatiqueDocument60 pagesÉlectromagnétisme en Régime StatiqueSovann LongPas encore d'évaluation
- TD 1Document3 pagesTD 1Tamokoue0% (1)