Vous aimerez peut-être aussi
- Annales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésD'EverandAnnales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- Vibration Exo CorrigerDocument2 pagesVibration Exo CorrigerdjamilPas encore d'évaluation
- Elast EMD2 2003Document2 pagesElast EMD2 2003Ahmed Bel Haj BrahimPas encore d'évaluation
- Apprentissage Automatique Feuille D'exercices: Exercice 1Document6 pagesApprentissage Automatique Feuille D'exercices: Exercice 1Med Djameleddine Bougrine100% (1)
- TD Éléctronique AnalogiqueDocument9 pagesTD Éléctronique AnalogiqueAbdELILAH MEZIANEPas encore d'évaluation
- Elast EMD2 2003 PDFDocument2 pagesElast EMD2 2003 PDFhakimkorichi100% (1)
- CSPlas 2Document16 pagesCSPlas 2KangamaPas encore d'évaluation
- BTS CPI 2 CH 5 Lasers Et ApplicationsDocument2 pagesBTS CPI 2 CH 5 Lasers Et ApplicationsLucas Filipuzzi50% (2)
- Emd 2 MMC 2012Document2 pagesEmd 2 MMC 2012Houcine Cool75% (4)
- TD: Calcul Non Linéaire Des Structures, Ing2 GCDocument7 pagesTD: Calcul Non Linéaire Des Structures, Ing2 GCMohamed Thiam HD100% (1)
- CCP MP 2019 Maths 2 CorrigeDocument5 pagesCCP MP 2019 Maths 2 CorrigeAnowar SaleinePas encore d'évaluation
- Meca1901ex Sept2008 PDFDocument138 pagesMeca1901ex Sept2008 PDFSoufiane ElPas encore d'évaluation
- Cours EcqDocument33 pagesCours EcqDENOUPas encore d'évaluation
- Capture D'écran . 2022-11-04 À 21.55.54Document3 pagesCapture D'écran . 2022-11-04 À 21.55.54Marwa ChoukriPas encore d'évaluation
- NormeDocument9 pagesNormefredericcascoPas encore d'évaluation
- Cc3 Equations Aux Dérivées Partielles EDPDocument17 pagesCc3 Equations Aux Dérivées Partielles EDPHadjer zitPas encore d'évaluation
- Relativité 4Document29 pagesRelativité 4ekpedossehthomas17Pas encore d'évaluation
- M.inter Analyse PDFDocument7 pagesM.inter Analyse PDFAli SalahPas encore d'évaluation
- Exercice Fluage D'une Poutre en FlexionDocument4 pagesExercice Fluage D'une Poutre en FlexionScribd ReaderPas encore d'évaluation
- MefDocument8 pagesMefDjamelNasratPas encore d'évaluation
- Exam 3 Physique Des Composants - 2Document6 pagesExam 3 Physique Des Composants - 2Mohamed MathématicienPas encore d'évaluation
- Cours EcqDocument33 pagesCours EcqDaniel Amia somwePas encore d'évaluation
- Elastoplasticite Des Systemes de Barres en Flexion: Chapitre IiiDocument19 pagesElastoplasticite Des Systemes de Barres en Flexion: Chapitre IiiAdnane100% (1)
- Anum Corrigé 2007Document9 pagesAnum Corrigé 2007archivesetpPas encore d'évaluation
- TD Comportementconservation1718Document2 pagesTD Comportementconservation1718beckerrolandhPas encore d'évaluation
- Sujet TP1Document3 pagesSujet TP1v9vw7zrrmqPas encore d'évaluation
- Turb Exam11 2Document4 pagesTurb Exam11 2khadija eddahbyPas encore d'évaluation
- 00exopad 7Document5 pages00exopad 7OUSSAMA OUSSAMAPas encore d'évaluation
- Chapitre 7Document25 pagesChapitre 7sfwbx6wdz9Pas encore d'évaluation
- DS2 Électro+optique PDFDocument6 pagesDS2 Électro+optique PDFAnis SouissiPas encore d'évaluation
- Ex Form QDocument4 pagesEx Form QDoucet LeloPas encore d'évaluation
- Chapitre 2Document12 pagesChapitre 2abdallahPas encore d'évaluation
- Tle CDocument3 pagesTle CRodriguePas encore d'évaluation
- EDO EDP m1-td3-2020Document4 pagesEDO EDP m1-td3-2020Marc TentiPas encore d'évaluation
- td2 Topologie PDFDocument4 pagestd2 Topologie PDFAntonio WarnerPas encore d'évaluation
- td1 IndicationsDocument7 pagestd1 IndicationsEmma FvrePas encore d'évaluation
- Algebre CorDocument4 pagesAlgebre CorEric RatsimbazafyPas encore d'évaluation
- Systime LiniéreDocument3 pagesSystime LiniéreYassinPas encore d'évaluation
- Applications Line AiresDocument10 pagesApplications Line AiresMed RhaiouzPas encore d'évaluation
- TD5: Nombres Re Els - Suites Re Elles Et ComplexesDocument9 pagesTD5: Nombres Re Els - Suites Re Elles Et ComplexesRoom RoomPas encore d'évaluation
- Cnaem Maths Ect 2017Document5 pagesCnaem Maths Ect 2017Profchaari SciencesPas encore d'évaluation
- Analyse 4Document44 pagesAnalyse 4lahcen.ech-chariy.81Pas encore d'évaluation
- Exercice I: CCP - Tsi - 2005 - 1 1Document6 pagesExercice I: CCP - Tsi - 2005 - 1 1api-3762501Pas encore d'évaluation
- PC-Corrige2018 S1Document8 pagesPC-Corrige2018 S1Doha FriatPas encore d'évaluation
- 9 16 Examen SolutionDocument7 pages9 16 Examen SolutionSarra kemamPas encore d'évaluation
- DGD 10 Sol 2021Document7 pagesDGD 10 Sol 2021iherehjiqcytygxiogPas encore d'évaluation
- JMSouriau-mecanique Des Milieux Continus 6Document12 pagesJMSouriau-mecanique Des Milieux Continus 6Descartes VergezPas encore d'évaluation
- Cours EvnDocument21 pagesCours EvnFatima Ezzahrae OujaddouPas encore d'évaluation
- TD4 Suites 22-23Document2 pagesTD4 Suites 22-23Amina AlalguiPas encore d'évaluation
- DL n°2-PCSI-2023-2024Document3 pagesDL n°2-PCSI-2023-2024kydkyluflufylPas encore d'évaluation
- 02 Topologie EvnDocument2 pages02 Topologie EvnabrahamkyelemPas encore d'évaluation
- Travaux Dirigés de Mécanique AnalytiqueDocument71 pagesTravaux Dirigés de Mécanique AnalytiquehassegoutePas encore d'évaluation
- Analyse 1-17-18 Fiche 2 CorrigeDocument7 pagesAnalyse 1-17-18 Fiche 2 CorrigeÀY'oubOu'NiPas encore d'évaluation
- Trpcondesemdielect 0910Document54 pagesTrpcondesemdielect 0910Azeddine ChelouchePas encore d'évaluation
- Exercice Ch5 3Document2 pagesExercice Ch5 3أسامة مكريمPas encore d'évaluation
- Algorithmes Aleatoires Pour Recherche Et Classement Dans Une Liste de NombresDocument6 pagesAlgorithmes Aleatoires Pour Recherche Et Classement Dans Une Liste de NombresSaid GhazaouiPas encore d'évaluation
- Turb M2 Exam0809Document4 pagesTurb M2 Exam0809issaPas encore d'évaluation
- tp06 Eq-LaplaceDocument6 pagestp06 Eq-LaplacedonaldmanuhounsaPas encore d'évaluation
- Analyse 1 2017 2018 Fiche 2Document2 pagesAnalyse 1 2017 2018 Fiche 2DOUIBI TAKI EDDINEPas encore d'évaluation
- Corrigé Interrogation1 - OP 26112015Document2 pagesCorrigé Interrogation1 - OP 26112015selmaPas encore d'évaluation
- TPCoaxialDocument5 pagesTPCoaxialAbdessamad EzzoubayduPas encore d'évaluation
- Sujets Master 2 Génie CivilDocument4 pagesSujets Master 2 Génie CivilAdnanePas encore d'évaluation
- BEL4720Document72 pagesBEL4720AdnanePas encore d'évaluation
- F Ecrouissage PolyDocument8 pagesF Ecrouissage PolyAdnanePas encore d'évaluation
- CFM2007 1130Document6 pagesCFM2007 1130AdnanePas encore d'évaluation
- Calcul D'un Portique en Élastoplasticité: M M M M M MDocument9 pagesCalcul D'un Portique en Élastoplasticité: M M M M M MAdnanePas encore d'évaluation
- Elastoplasticite Des Systemes de Barres en Flexion: Chapitre IiiDocument19 pagesElastoplasticite Des Systemes de Barres en Flexion: Chapitre IiiAdnane100% (1)
- Diagramme Reel de Traction PDFDocument3 pagesDiagramme Reel de Traction PDFDeghboudj SamirPas encore d'évaluation
- Cours S4 IDocument24 pagesCours S4 IEmadPas encore d'évaluation
- Corige Convection 1Document2 pagesCorige Convection 1halim otmanePas encore d'évaluation
- Chapitre 8 - Etude Transverale Des TabliersDocument38 pagesChapitre 8 - Etude Transverale Des TabliersBec RoudaynaPas encore d'évaluation
- M1 GPMDocument27 pagesM1 GPMTøů FíìkPas encore d'évaluation
- Droite de Pente LocalDocument22 pagesDroite de Pente Localboussaid nejla100% (1)
- Zaaoui m1 Construction Mecanique Technique de SoudageDocument2 pagesZaaoui m1 Construction Mecanique Technique de SoudageAdnane Es-saiydyPas encore d'évaluation
- 2nde CD - APC - Etude Expérimentale D'un Dipôle Actif Validé.Document7 pages2nde CD - APC - Etude Expérimentale D'un Dipôle Actif Validé.mohamedPas encore d'évaluation
- Webinar N°5 FR - FinalDocument60 pagesWebinar N°5 FR - Finalantar DouadiPas encore d'évaluation
- Combine PDFDocument129 pagesCombine PDFdzrsami1Pas encore d'évaluation
- Analyse Exergétique D'un Cycle Organique de Rankine (COR) Sous-Critique Pour Récupérer Les Chaleurs Perdues À Basse TempératureDocument6 pagesAnalyse Exergétique D'un Cycle Organique de Rankine (COR) Sous-Critique Pour Récupérer Les Chaleurs Perdues À Basse Températuremonsterh5Pas encore d'évaluation
- Compte Rendu FlexionDocument9 pagesCompte Rendu FlexionMarouf OussamaPas encore d'évaluation
- 1ere-Spe Seance P2.1Document2 pages1ere-Spe Seance P2.1mendasbilal0Pas encore d'évaluation
- Canaux de TransmissionDocument31 pagesCanaux de Transmissionالنوري أيمن - NOURI AYMENPas encore d'évaluation
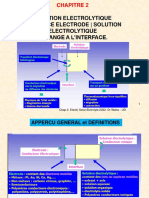
- Solution Electrolytique Interface Electrode - Solution Electrolytique Echange A L'InterfaceDocument28 pagesSolution Electrolytique Interface Electrode - Solution Electrolytique Echange A L'InterfaceMoussa ilyas AdenPas encore d'évaluation
- QCM Chim 3Document4 pagesQCM Chim 3dembele9242Pas encore d'évaluation
- EU-0-COM - GRC-003-NDC Ferraillage Stations de RelevageDocument31 pagesEU-0-COM - GRC-003-NDC Ferraillage Stations de RelevagediengPas encore d'évaluation
- Aluminium 2Document11 pagesAluminium 2Carmen AdlerPas encore d'évaluation
- Tp01 Tm1 Phase GazeuseDocument13 pagesTp01 Tm1 Phase GazeuseHabet Sara86% (7)
- 1-Cours CHP 1 Et 2Document10 pages1-Cours CHP 1 Et 2WASSPas encore d'évaluation
- Chapitre3 Composants D'une Liaison OptiqueDocument22 pagesChapitre3 Composants D'une Liaison OptiqueRosny TakeuPas encore d'évaluation
- 11 PDFDocument34 pages11 PDFIlyes BechagraPas encore d'évaluation
- TD4Document5 pagesTD4Ismahene SmahenoPas encore d'évaluation
- Roulement MoteurDocument130 pagesRoulement MoteurAlexandreCaironiPas encore d'évaluation
- Projet TP Circuit Electrique 2Document7 pagesProjet TP Circuit Electrique 2danherdoniPas encore d'évaluation
- YAH6348 Mecanisme de CORROSION LOCALISEE DES Acier InixydablDocument149 pagesYAH6348 Mecanisme de CORROSION LOCALISEE DES Acier InixydablzikPas encore d'évaluation
- Memoire 3 1Document168 pagesMemoire 3 1أسامة ابو ياسرPas encore d'évaluation