Académique Documents
Professionnel Documents
Culture Documents
Chapitre 13 Ingénierie Mécanique
Transféré par
Noé JolivetTitre original
Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Chapitre 13 Ingénierie Mécanique
Transféré par
Noé JolivetDroits d'auteur :
Formats disponibles
La plus longue grue
Chapitre 13 télescopique peut
se déployer jusqu’à
L’INGÉNIERIE une longueur de
MÉCANIQUE 100 m
grâce à des guidages.
1 066 740
rivets, dont un qui serait
en or, ont été nécessaires
pour assembler le pont
de Québec.
Un mécanisme pesant environ
5 tonnes
permet le fonctionnement
de Big Ben, cette célèbre
horloge de Londres.
L’UNIVERS TECHNOLOGIQUE 281
13435_Obs4_ste_chap-13_ep4.indd 281 2015-01-22 5:43 PM
L E S LIAISONS DA N S
CHAPITRE 13
L E S OBJETS TECHNIQUES Pages 426 à 430
1 a) Qu’est-ce que la fonction de liaison ?
C’est une fonction mécanique assurée par tout organe qui lie différentes pièces
d’un objet technique.
b) Le tableau ci-dessous présente les quatre paires de caractéristiques servant à décrire
les liaisons dans un objet technique. Remplis-le.
Paire Description Caractéristiques de la liaison
Les pièces liées n’ont aucun mouvement
Liaison totale.
indépendant l’une par rapport à l’autre.
1
Au moins une pièce liée bouge
Liaison partielle.
indépendamment par rapport à une autre.
Les surfaces des pièces liées ou l’organe
de liaison sont déformables et assurent Liaison élastique.
2 un mouvement de rappel des pièces.
Les surfaces des pièces liées ou l’organe
Liaison rigide.
de liaison sont rigides.
Les pièces tiennent ensemble à l’aide d’un
Liaison indirecte.
organe de liaison.
3
Les pièces tiennent ensemble sans
Liaison directe.
l’intermédiaire d’un organe de liaison.
La séparation des pièces liées n’endommage
ni leur surface, ni l’organe de liaison s’il y Liaison démontable.
4 en a un.
La séparation des pièces endommage leur
Liaison indémontable.
surface ou l’organe de liaison.
2 a) Que sont les degrés de liberté ? © ERPI Reproduction interdite
Ce sont les mouvements indépendants possibles pour une pièce dans un objet technique.
b) Quelle caractéristique doit avoir une liaison pour qu’une pièce possède au moins un
degré de liberté ? Explique ta réponse.
Il faut que cette pièce possède une liaison partielle, car c’est la seule caractéristique qui
décrit la possibilité de mouvement d’une pièce par rapport aux autres.
c) Quel est le nombre maximum de degrés de liberté qu’une pièce peut avoir ?
Une pièce peut avoir jusqu’à six degrés de liberté.
282 L’UNIVERS TECHNOLOGIQUE
13435_Obs4_ste_chap-13_ep4.indd 282 2015-01-22 5:43 PM
3 a) Combien de degrés de liberté les deux
Porte A
CHAPITRE 13
portes d’armoire pointées sur la photo
ci-contre possèdent-elles ? Porte B
Un degré de liberté.
b) Quel est ou quels sont les mouvements
indépendants possibles de ces deux
portes d’armoire ?
Une rotation selon l’axe y.
c) Une de ces deux portes d’armoire est munie d’une charnière spéciale permettant de
limiter sa liberté de mouvement. Selon toi, laquelle est-ce ? Pourquoi est-il préférable
d’en limiter l’ouverture ?
Il s’agit de la porte A. Il est préférable de limiter son ouverture pour éviter qu’elle ne
se cogne contre la hotte de la cuisinière, qui se trouve plus à gauche, ce qui pourrait
l’endommager.
4 Nomme le ou les organes de liaison utilisés dans les situations suivantes.
a) Un ébéniste fabrique une table en utilisant une scie,
un marteau, du bois, de la colle et des clous. La colle et les clous.
b) Une mécanicienne enlève une roue endommagée
en soulevant une voiture avec un cric, puis en
retirant les écrous. Les écrous.
c) Un ouvrier installe un plancher de céramique en
étendant de la colle avec une truelle, pour ensuite
poser les carreaux. La colle.
d) En découpant un morceau de tissu, Patricia a brisé
ses ciseaux : les deux lames et le rivet sont tombés
sur le plancher de l’atelier. Le rivet.
RÉALITÉ ?
© ERPI Reproduction interdite
On doit l’invention du velcro à une mauvaise herbe.
RÉALITÉ. Le velcro a été inventé en 1948 par George
de Mestral, un ingénieur suisse. Il a imaginé cet organe de
liaison en étudiant comment les bardanes (qu’on appelle
communément « toques » ou « pipiques » au Québec) se
liaient au tissu de ses vêtements et à la fourrure de son
chien au cours de ses promenades quotidiennes. Le mot
« velcro » est la contraction des mots «velours» et
«crochet». Lorsqu’on presse la bande « velours », faite
de petites boucles de plastique, contre l’autre bande,
faite de petits crochets de plastique, le velcro forme
une liaison démontable.
CHAPITRE 13 L’INGÉNIERIE MÉCANIQUE 283
13435_Obs4_ste_chap-13_ep4.indd 283 2015-01-22 5:44 PM
5 Donne les quatre caractéristiques de chaque liaison pointée sur les photos.
CHAPITRE 13
a) b) c)
Directe. Indirecte. Indirecte.
Indémontable. Indémontable. Indémontable.
Rigide. Rigide. Rigide.
Totale. Totale. Partielle.
6 Vrai ou faux ? Lorsqu’un énoncé est faux, corrige-le.
a) Il n’y a pas d’organe de liaison entre deux pièces qui possèdent une liaison directe.
Vrai.
b) L’utilisation de clous comme organes de liaison forme toujours une liaison démontable.
Faux. L’utilisation de ces organes de liaison forme toujours une liaison indémontable.
7 Complète le tableau ci-dessous en indiquant les mouvements indépendants possibles
et le nombre de degrés de liberté dans les objets techniques suivants.
a) b) c)
© ERPI Reproduction interdite
Mouvements
Translation par rapport Rotation par rapport Rotation par rapport à
indépendants
à l’axe y. à l’axe x. l’axe y.
Translation par rapport
à l’axe y.
Nombre
de degrés 1 1 2
de liberté
284 L’UNIVERS TECHNOLOGIQUE
13435_Obs4_ste_chap-13_ep4.indd 284 2015-01-22 5:44 PM
L A FONCTION D E GUIDAGE Pages 431 à 435
CHAPITRE 13
1 Remplis le tableau ci-dessous en indiquant les types de guidage et en dessinant leur symbole.
Type de guidage Description Symbole
Assure un mouvement de translation
Guidage en translation. rectiligne à une pièce mobile.
Assure un mouvement de translation
Guidage hélicoïdal. d’une pièce mobile lorsqu’il y a rotation
selon le même axe de cette pièce.
Assure un mouvement de
Guidage en rotation. rotation à une pièce mobile.
2 Quel type de guidage (hélicoïdal, en rotation ou en translation) correspond à chacune des
situations suivantes ?
a) On souhaite qu’une pièce glisse d’avant
en arrière lorsqu’elle est actionnée. Guidage en translation.
b) Une vis doit être insérée dans un écrou. Guidage hélicoïdal.
c) On doit guider un objet de forme
cylindrique afin qu’il tourne sur lui-même. Guidage en rotation.
3 Dessine le symbole du type de guidage utilisé.
a) b)
© ERPI Reproduction interdite
c) d)
CHAPITRE 13 L’INGÉNIERIE MÉCANIQUE 285
13435_obs4_ste_chap-13.indd 285 2015-02-05 11:25 AM
4 La lame et le coulisseau sont deux pièces essentielles d’un couteau à lame rétractable.
CHAPITRE 13
a) Laquelle de ces deux pièces est une pièce guidée ?
La lame.
Coulisseau
b) Laquelle de ces deux pièces est un organe
de guidage ?
Le coulisseau.
c) Quel type de guidage cet organe permet-il ?
Lame
Un guidage en translation.
5 Que suis-je ?
a) Je suis la force qui s’oppose au glissement d’une pièce
mobile sur une autre pièce. Frottement.
b) Je suis un phénomène qui se manifeste lorsque deux
surfaces ont tendance à rester accolées, s’opposant
ainsi au glissement. Adhérence.
6 Vrai ou faux ? Vrai Faux
a) Plus l’adhérence est grande entre deux pièces, plus le frottement ✓
est important.
b) Le polissage augmente l’adhérence. ✓
c) Le frottement a toujours lieu entre la pièce mobile et l’organe ✓
de liaison.
d) Un lubrifiant peut être un solide. ✓
7 a) L’hiver, les villes procèdent souvent à l’épandage de sable sur les routes. Explique pourquoi.
Parce que le sable augmente l’adhérence des pneus sur la route lorsque celle-ci
est glissante.
b) Nomme un autre moyen technologique permettant d’obtenir le même avantage que © ERPI Reproduction interdite
l’épandage de sable sur les routes.
Exemples de réponses. L’insertion de clous ou de coquilles de noix dans les pneus. Une
configuration de la gomme des pneus procurant une meilleure adhérence. L’utilisation
de caoutchouc plus adhérent à basse température.
c) L’usure des pneus est un exemple d’inconvénient lié au frottement des pneus sur la
chaussée. Trouve un autre exemple.
Exemples de réponses. L’effacement de la peinture sur les routes. L’usure du revêtement
de la chaussée.
286 L’UNIVERS TECHNOLOGIQUE
13435_Obs4_ste_chap-13_ep4.indd 286 2015-01-22 5:45 PM
8 Dans chacune des situations suivantes, comment pourrait-on, selon le cas, faire augmenter
CHAPITRE 13
ou diminuer le frottement ? Exemples de réponses.
a) Laurie a fabriqué un jouet en bois pour sa petite sœur, mais certaines pièces glissent mal
les unes sur les autres parce que leurs surfaces sont trop rugueuses.
Il faut diminuer le frottement en polissant les pièces de bois. L’application d’une cire
pourrait aussi aider au glissement de certaines pièces du jouet.
b) La porte de l’atelier de technologie grince toujours lorsqu’on l’ouvre.
Il faut diminuer le frottement en appliquant un lubrifiant (une huile ou une graisse) entre
les pièces de l’organe de guidage (les pentures et les gonds de la porte).
c) Les marches d’un escalier extérieur sont très glissantes lorsqu’elles sont mouillées.
On peut augmenter l’adhérence (ou le frottement) sur les marches en installant un tapis
de caoutchouc ou de fibre de coco (toile de jute), ou encore en appliquant une matière
adhérente comme une peinture abrasive.
d) Les skis de fond de Jacob glissent mal sur la neige.
On peut diminuer le frottement entre la neige et les skis en appliquant une cire qui
adhère aux skis et qui leur permet de mieux glisser sur la neige.
e) Les trottoirs qui mènent à l’école sont glacés.
On peut augmenter le frottement entre les pieds des élèves qui se rendent à l’école et
les trottoirs en épandant du sel, du sable ou du gravier sur la glace.
À QUOI ÇA SERT ?
© ERPI Reproduction interdite
C’est notamment grâce aux innovations dans
la façon de guider les trains dans les montagnes
russes que ces manèges offrent des parcours à
la fois plus rocambolesques et plus sécuritaires.
Ce sont les rails qui servent de guides pour
les trains. Avant 1959, toutes les montagnes
russes étaient munies de rails ayant une forme
plate. Aujourd’hui, beaucoup de montagnes
russes utilisent des rails tubulaires. Leur forme
cylindrique permet d’obtenir des parcours
beaucoup plus sinueux et plus intenses, comme
lorsque les utilisateurs du manège se retrouvent
la tête en bas !
CHAPITRE 13 L’INGÉNIERIE MÉCANIQUE 287
13435_Obs4_ste_chap-13_ep4.indd 287 2015-01-22 5:45 PM
L E S SYSTÈMES
CHAPITRE 13
D E TRANSMISSION
D U MOUVEMENT Pages 435 à 441
1 Nomme les systèmes de transmission du mouvement illustrés ci-dessous.
a) b)
Système à courroie et à poulies. Système à roues dentées.
c) d)
Système à roues de friction. Système à courroie et à poulies.
© ERPI Reproduction interdite
2 Un système de transmission du mouvement possède un organe moteur et au moins un
organe mené. Décris, en quelques mots, ce qui caractérise ces deux organes.
L’organe moteur est celui qui reçoit la force nécessaire pour actionner le système, alors que
l’organe mené est celui qui est entraîné par le mouvement de l’organe moteur.
3 À quel type d’organe correspondent les chaînes et les courroies utilisées dans certains
systèmes de transmission du mouvement ?
À un organe intermédiaire.
288 L’UNIVERS TECHNOLOGIQUE
13435_Obs4_ste_chap-13_ep4.indd 288 2015-01-22 5:46 PM
4 La photo ci-contre montre un batteur à œufs manuel. Lorsqu’on tourne la manivelle,
CHAPITRE 13
les fouets se mettent à tourner, ce qui permet de fouetter les œufs.
a) Pointe en rouge le ou les organes menés
: rouge
de ce système.
: bleu
b) Pointe en bleu le ou les organes moteurs
de ce système.
c) Ce système de transmission du mouvement Manivelle
comporte-t-il un organe intermédiaire ?
Si oui, encercle-le en noir.
Non. Fouets
d) Quel est le nom de ce système de transmission du mouvement ?
Un système à roues dentées.
5 a) Pointe et nomme les trois types d’organes mécaniques présents dans le système suivant.
Organe
Organe
intermédiaire.
moteur.
Organes
menés.
b) Quel est le nom de ce système de transmission du mouvement ?
Un système à chaîne et à roues dentées.
6 Nomme deux types de systèmes de transmission du mouvement dans lesquels la présence
d’organe intermédiaire n’est pas indispensable.
Exemples de réponses. Le système à roues dentées. Le système à roue dentée et à vis
sans fin. Le système à roues de friction.
© ERPI Reproduction interdite
7 Observe l’illustration ci-contre.
a) Si la roue A tourne dans le sens horaire,
dans quel sens tourneront les autres roues ?
La roue B : Sens horaire.
La roue C : Sens anti-horaire.
La roue D : Sens horaire.
b) Quel est le nom de ce système de
transmission du mouvement ?
Un système à chaîne et à roues dentées.
CHAPITRE 13 L’INGÉNIERIE MÉCANIQUE 289
13435_Obs4_ste_chap-13_ep4.indd 289 2015-01-22 5:46 PM
8 Remplis le tableau suivant en indiquant à quels systèmes de transmission du mouvement
CHAPITRE 13
s’appliquent les avantages et les inconvénients suivants.
Système Système
Système Système Système à
à chaîne à roue
Avantages et inconvénients à roues de à roues poulies et à
et à roues dentée et à
friction dentées courroie
dentées vis sans fin
Permet la transmission du
mouvement entre deux ou
✓ ✓
plusieurs pièces éloignées
les unes des autres.
Nécessite des matériaux dont
✓ ✓
l’adhérence est élevée.
Présente un risque de glissement
✓ ✓
entre les organes du système.
Permet la transmission la
plus fine et la plus précise ✓
du mouvement.
Permet de transmettre le
mouvement entre des organes
✓ ✓ ✓
dont l’axe de rotation n’est pas
dans le même sens.
Doit être lubrifié souvent pour
que les pièces du système ne
s’usent pas, surtout lorsque le ✓ ✓
mouvement est transmis à haute
vitesse.
Est réversible. ✓ ✓ ✓ ✓
Nécessite des roues aux dentures
✓ ✓
identiques.
Montre un sens de rotation
du mouvement qui alterne
✓ ✓
nécessairement d’une roue
à l’autre.
9 Lequel de ces énoncés décrit correctement ce qu’est un système réversible ?
© ERPI Reproduction interdite
a. Un système est réversible lorsque l’organe moteur peut devenir l’organe mené ✓
et vice-versa.
b. Un système est réversible lorsque le sens de rotation de l’organe moteur et celui
de l’organe mené peuvent être inversés.
c. Un système est réversible lorsque l’organe moteur ne tourne pas dans le même
sens que l’organe mené.
d. Un système est réversible lorsqu’on peut passer d’un système à roues dentées
à un système à roues de friction.
e. Un système est réversible lorsqu’on peut tourner l’organe moteur vers la gauche
ou vers la droite.
290 L’UNIVERS TECHNOLOGIQUE
13435_Obs4_ste_chap-13_ep4.indd 290 2015-01-22 5:46 PM
10 À l’aide d’une flèche, indique le sens de rotation des organes menés dans chacun des
CHAPITRE 13
systèmes ci-dessous, les organes moteurs étant bleus. Nomme ensuite le système représenté.
a) b)
Système à roues dentées. Système à roues dentées et à vis sans fin.
c) d)
Système à chaîne et à roues dentées. Système à roues de friction.
11 Dans chacune des situations suivantes, quel système de transmission du mouvement
devrais-tu choisir ? Explique tes réponses.
a) Tu souhaites fabriquer une machine dans laquelle certaines pièces, qui sont éloignées les
unes des autres, transmettront un mouvement rapide de rotation. Tu ne veux pas avoir
à lubrifier le système.
Le système à courroie et à poulies conviendrait le mieux, car il permet de relier des
pièces éloignées les unes des autres et de transmettre un mouvement rapide de rotation.
© ERPI Reproduction interdite
De plus, ce système n’a pas besoin d’être lubrifié, contrairement au système à chaîne
et à roues dentées.
b) Tu souhaites fabriquer une machine qui permet de transmettre différentes vitesses de
rotation à des pièces rapprochées les unes des autres, avec un axe de rotation parallèle.
Le système à roues dentées conviendrait le mieux, car il permet de relier des pièces
rapprochées les unes des autres tout en permettant un mouvement de rotation parallèle.
CHAPITRE 13 L’INGÉNIERIE MÉCANIQUE 291
13435_Obs4_ste_chap-13_ep4.indd 291 2015-01-22 5:46 PM
LES CHANGEMENTS DE VITESSE
CHAPITRE 13
DANS LES SYSTÈMES DE
TRANSMISSION DU MOUVEMENT Pages 442 à 445
1 Indique la variation de vitesse (augmentation, diminution ou aucun changement) qui
correspond à chacune des situations suivantes.
Situation Variation de la vitesse
Le mouvement est transmis entre deux roues ou deux
Aucun changement.
poulies de même diamètre.
Le mouvement est transmis d’une roue dentée ayant moins
Diminution.
de dents vers une roue dentée ayant plus de dents.
Le mouvement est transmis d’une roue ou d’une poulie
d’un diamètre plus grand vers une roue ou une poulie Augmentation.
d’un diamètre plus petit.
Le mouvement est transmis d’une vis sans fin de petite
Diminution.
taille vers une roue dentée de plus grande taille.
Le mouvement est transmis entre deux roues ayant
Aucun changement.
le même nombre de dents.
Le mouvement est transmis d’une poulie vers une poulie
Diminution.
de diamètre plus grand.
Le mouvement est transmis grâce à une courroie plus large.
Aucun changement.
La distance entre les roues dentées est réduite.
Aucun changement.
2 Pour chacun des systèmes de transmission du mouvement a) à d), indique l’énoncé A à E
qui permettrait de faire augmenter la vitesse de rotation.
a. Le mouvement est transmis d’une roue b. Le mouvement est transmis d’une roue
de friction vers une roue de friction de dentée vers une roue dentée ayant plus
diamètre plus grand. de dents. © ERPI Reproduction interdite
c. Le mouvement est transmis d’une roue d. Le mouvement est transmis d’une
dentée vers une roue dentée ayant poulie vers une poulie de diamètre
moins de dents. plus petit.
e. Le mouvement est transmis d’une roue
de friction vers une roue de friction de
diamètre plus petit.
a) Système à courroie b) Système à chaîne et
et à poulies : D à roues dentées : C
c) Système à roues dentées : C d) Système à roues de friction : E
292 L’UNIVERS TECHNOLOGIQUE
13435_Obs4_ste_chap-13_ep4.indd 292 2015-01-22 5:46 PM
3 Calcule les rapports de vitesse des systèmes suivants.
CHAPITRE 13
a) Système 1
Rapport de vitesse :
10 dents 1
!
30 dents 3
La roue A tourne trois fois plus vite
que la roue B.
b) Système 2
Rapport de vitesse :
20 cm 5
!
4 cm 1
La roue A tourne cinq fois moins vite
que la roue B.
c) Système 3
Rapport de vitesse :
18 cm 3
!
18 cm 6 cm 1
6 cm
La roue A tourne trois fois moins vite
que la roue B.
4 Calcule la vitesse des organes de la question précédente dans chacun des cas suivants.
Système Vitesse de l’organe A Vitesse de l’organe B
60 tours/min 20 tours/min
1
42 tours/min 14 tours/min
75 tours/min 375 tours/min
2
18 tours/min 90 tours/min
24 tours/min 72 tours/min
© ERPI Reproduction interdite
3
12 tours/min 36 tours/min
5 William doit fabriquer un système à 4 roues dentées dont la vitesse de rotation passe de
48 tours/min pour la roue A à 24 tours/min pour la B, puis à 30 tours/min pour la roue C
et, enfin, à 12 tours/min pour la roue D. Si la roue A possède 64 dents, combien de dents
devront posséder les roues suivantes ?
a) La roue B : 32 dents.
b) La roue C : 40 dents.
c) La roue D : 16 dents.
CHAPITRE 13 L’INGÉNIERIE MÉCANIQUE 293
13435_Obs4_ste_chap-13_ep4.indd 293 2015-01-22 5:46 PM
LES SYSTÈMES DE
CHAPITRE 13
TRANSFORMATION
D U MOUVEMENT Pages 445 à 449
1 Nomme les systèmes de transformation du mouvement illustrés.
a) Système à vis et à écrou type I. b) Système à pignon et à crémaillère.
c) Système à came
d) Système à bielle
et à tige-poussoir.
et à manivelle.
2 Vrai ou faux ? Vrai Faux
a) Seuls les systèmes à vis et à écrou ne sont pas réversibles. ✓
b) Dans les systèmes à vis et à écrou de type I, la vis est l’organe moteur. ✓
c) Le système à bielle et à manivelle permet un mouvement de va-et-vient. ✓
© ERPI Reproduction interdite
d) Un pignon est une roue dentée. ✓
3 Lequel de ces deux systèmes de transformation du mouvement utilise une excentrique
comme organe moteur ? Explique ta réponse en précisant la différence entre une
excentrique et une came.
C’est le système B, parce que l’axe de rotation de l’organe a b
moteur est placé ailleurs qu’en son centre. Le système A utilise
une came parce que l’axe de rotation de l’organe moteur est
situé en son centre.
294 L’UNIVERS TECHNOLOGIQUE
13435_Obs4_ste_chap-13_ep4.indd 294 2015-01-22 5:46 PM
4 Indique à quels systèmes de transformation du mouvement s’appliquent les avantages
CHAPITRE 13
et les inconvénients suivants.
Système
Système à Système à Système à Système à
à vis et
Avantages et inconvénients vis et écrou pignon et à came et à bielle et à
écrou de
de type I crémaillère tige-poussoir manivelle
type II
Permet la transformation d’un
mouvement de rotation en ✓ ✓ ✓ ✓ ✓
un mouvement de translation.
Permet la transformation d’un
mouvement de translation en ✓ ✓
un mouvement de rotation.
Transforme un mouvement
de rotation en un mouvement
de translation alternatif, ✓ ✓
c’est-à-dire un mouvement
de va-et-vient.
N’est pas réversible. ✓ ✓ ✓
Doit généralement inclure
✓
un ressort.
Possède des éléments dentés
qui doivent tous avoir la même ✓
denture.
Doit souvent être lubrifié pour
que les pièces du système ne
s’usent pas, surtout lorsque le ✓
mouvement est transformé à
haute vitesse.
5 De quel système s’agit-il ?
a) Coralie souhaite fabriquer un système qui transformera un mouvement de rotation en
un mouvement de translation. Ce système ne doit pas être réversible. De plus, elle ne
veut pas avoir à le lubrifier et le mouvement créé ne doit pas être un mouvement de
va-et-vient.
Un système à vis et à écrou.
© ERPI Reproduction interdite
b) Après cette première réalisation, Coralie se lance dans la construction d’un second
système qui fera partie d’un moteur. Ce système sera réversible et accomplira des
mouvements de va-et-vient rapides.
Un système à bielle et à manivelle.
c) Finalement, Coralie se lance dans la conception d’un système qui permettra à une tige
de monter et de descendre à différentes hauteurs, selon un cycle bien défini. Ce système
sera conçu à partir d’une roue dont elle façonnera les côtés afin d’obtenir des parties
creuses.
Un système à came et à tige-poussoir.
CHAPITRE 13 L’INGÉNIERIE MÉCANIQUE 295
13435_Obs4_ste_chap-13_ep4.indd 295 2015-01-22 5:46 PM
BILAN DU CHAPITRE 13
1 Observe le boîtier du disque ci-contre.
a) Quelles sont les caractéristiques de la liaison
de la boîte avec son couvercle ?
Directe.
Rigide.
Démontable.
Partielle.
b) Quel type de guidage est utilisé dans cet objet ?
Guidage en rotation.
c) Combien de degrés de liberté possède le couvercle ?
1 degré de liberté.
d) Indique, s’il y a lieu, le ou les mouvements indépendants possibles du couvercle.
Rotation par rapport à l’axe y (Ry ).
2 Dans un vélo comme celui-ci, lorsqu’on appuie sur la poignée des freins arrière, le câble qui passe
dans le tube horizontal effectue un mouvement. Ce mouvement permet de serrer les freins sur
la roue arrière, ce qui produit un frottement suffisant pour ralentir ou arrêter la rotation de la
roue arrière.
Gaine
a) Quel type de mouvement le
câble effectue-t-il ? Câble
Un mouvement de translation.
Fixation
b) Quelle pièce guide le mouvement Tube horizontal
effectué par le câble ?
Poignée des
La gaine. freins arrière
c) Quelle fonction les fixations
© ERPI Reproduction interdite
remplissent-elles ? Freins arrière
Une fonction de liaison.
d) Est-ce que l’adhérence entre
les freins et la roue arrière du
vélo doit être élevée ou faible ?
Explique ta réponse.
L’adhérence entre les freins et la roue arrière doit être élevée afin d’offrir un meilleur
frottement. Ainsi, le freinage sera plus efficace.
296 L’UNIVERS TECHNOLOGIQUE
13435_Obs4_ste_chap-13_ep4.indd 296 2015-01-22 5:46 PM
3 Quelle est la différence entre la transmission du mouvement et la transformation du
CHAPITRE 13
mouvement ?
Lors de la transmission, le mouvement est communiqué d’une pièce à une autre sans que sa
nature soit modifiée. Lors de la transformation, la nature du mouvement communiqué d’une
pièce à une autre est modifiée.
4 À l’aide d’une flèche, pointe les organes de guidage présents dans les trois objets suivants,
puis indique s’il s’agit d’un guidage hélicoïdal, en translation ou en rotation.
a) b) c)
Guidage en translation. Guidage en rotation. Guidage hélicoïdal.
5 a) Pourquoi est-il utile de mettre de l’huile dans un moteur ?
Pour diminuer le frottement et ainsi réduire l’usure des pièces du moteur.
b) Quelle fonction mécanique est assurée par l’huile dans le moteur ?
L’huile assure la fonction de lubrification.
6 Depuis longtemps, les casse-tête sont des loisirs populaires. Quelles sont les caractéristiques
de la liaison entre deux pièces de casse-tête ?
Directe. Démontable.
Rigide. Totale.
© ERPI Reproduction interdite
7 Les ordinateurs portables sont de plus en plus utilisés au travail et à l’école. Comment
l’écran de l’ordinateur et les touches servant à écrire sur ces ordinateurs sont-ils guidés ?
a. L’écran et les touches sont guidés en rotation
b. L’écran et les touches sont guidés en translation.
c. L’écran est guidé en translation tandis que les touches
sont guidées en rotation.
d. L’écran est guidé en rotation tandis que les touches ✓
sont guidées en translation.
CHAPITRE 13 L’INGÉNIERIE MÉCANIQUE 297
13435_Obs4_ste_chap-13_ep4.indd 297 2015-01-22 5:47 PM
8 Une des deux roues d’un système à chaîne et à roues dentées possède 48 dents. Combien
CHAPITRE 13
de dents la seconde roue doit-elle avoir pour tourner huit fois plus vite que la première ?
Rapport de vitesse :
48 dents 48
!8 ! 6 dents
? dents 8
Réponse : La seconde roue doit avoir six dents.
9 a) Quel type de système est représenté dans le dessin suivant ?
Un système à courroie et à poulies.
b) Complète ce dessin en indiquant, à l’aide
de flèches, le sens de rotation de C 5 cm
chacune des poulies (B, C et D).
c) Calcule les rapports de vitesse
entre les poulies A/B, A/C et A/D 2cm
de ce système. B 8 cm
Rapport de vitesse A/B : D
4 cm 2
!
2 cm 1 4 cm
La roue A tourne deux fois moins A
vite que la roue B.
Rapport de vitesse A/C : Rapport de vitesse A/D :
4 cm 4 4 cm 1
! !
5 cm 5 8 cm 2
La roue A tourne 5/4 de fois (ou La roue A tourne deux fois plus
1,25 fois) plus vite vite
© ERPI Reproduction interdite
que la roue C. que la roue D.
10 Un étau comporte un système de transformation du mouvement,
soit un système à vis et à écrou. Lequel des énoncés suivants
concernant ce système est vrai ?
a. C’est un système réversible et la vis est l’organe moteur.
b. C’est un système irréversible et la vis est l’organe moteur. ✓
c. C’est un système réversible et l’écrou est l’organe moteur.
d. C’est un système irréversible et l’écrou est l’organe moteur.
298 L’UNIVERS TECHNOLOGIQUE
13435_Obs4_ste_chap-13_ep4.indd 298 2015-01-22 5:47 PM
11 Cette photo montre un système qui permet d’ajuster la tension d’une corde de guitare.
CHAPITRE 13
Lequel des énoncés suivant concernant ce système est vrai ?
a. Il s’agit d’un système à roue dentée ✓
et à vis sans fin. C’est un système de
transmission du mouvement irréversible.
b. Il s’agit d’un système à roue dentée
et à vis sans fin. C’est un système de
transformation du mouvement réversible.
c. Il s’agit d’un système à pignon et
à crémaillère. C’est un système de
transmission du mouvement réversible.
d. Il s’agit d’un système à pignon et
à crémaillère. C’est un système de
transformation du mouvement irréversible.
12 Dans ce système à roues dentées, laquelle des deux roues tourne le plus vite et quel est
son sens de rotation par rapport à l’autre roue ?
a. La roue 1 tourne plus vite et dans
le même sens que la roue 2.
2
b. La roue 1 tourne plus vite, mais
dans le sens inverse de la roue 2.
c. La roue 2 tourne plus vite et dans 1
le même sens que la roue 1.
d. La roue 2 tourne plus vite, mais dans ✓
le sens inverse de la roue 1.
13 Dans les montres de grande qualité, le mécanisme permettant
aux aiguilles de tourner comporte un système à roues dentées.
a) Quel est l’avantage de ce système par rapport au système
à roues de friction qui, pourtant, est moins cher à fabriquer ?
Dans un système à roues de friction, il peut y avoir
du frottement entre les roues, ce qui diminue la justesse
© ERPI Reproduction interdite
de l’heure indiquée.
b) Pourquoi ne pas utiliser un système à chaîne et à roues dentées plutôt qu’un système
à roues dentées ? Exemple de réponse.
Le système à chaîne et à roues dentées est surtout utilisé pour transmettre le mouvement
entre des pièces plutôt éloignées. Or, dans le boîtier d’une montre, les pièces sont très
rapprochées les unes des autres.
CHAPITRE 13 L’INGÉNIERIE MÉCANIQUE 299
13435_Obs4_ste_chap-13_ep4.indd 299 2015-01-22 5:48 PM
14 Pour changer un pneu lors d’une crevaison sur la
CHAPITRE 13
route, un cric peut être très utile. La photo ci-contre
montre un cric composé d’un système à vis et à écrou
de type I. Cependant, certains crics possèdent plutôt
un système à pignon et à crémaillère. Quel est
l’avantage du système à vis et à écrou par rapport
au système à pignon et à crémaillère lorsqu’on veut
maintenir la voiture soulevée ?
Le système à vis et à écrou de type I n’est pas réversible, contrairement au système à pignon
et à crémaillère. Ainsi, il est plus facile de bloquer le cric lorsque la voiture est soulevée, ce
qui diminue les risques que la voiture ne retombe soudainement.
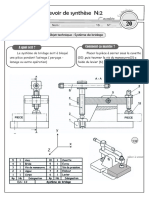
Pour répondre aux questions 15 à 21, sers-toi des
figures suivantes. Elles montrent le fonctionnement
d’un treuil mécanique, un mécanisme qu’on utilise
parfois pour tendre les filets de tennis.
10
Repère Nombre Désignation
1 1 Poignée. © ERPI Reproduction interdite
2 1 Manivelle.
3 4 Vis.
4 1 Rondelle.
5 1 Corps. 11
6 1 Pignon. 4 3
7 1 Roue dentée. 8
8 1 Cliquet.
9 1 Crémaillère. 7
10 1 Crochet. 5 2 1
11 1 Butée d’arrêt. 6
300 L’UNIVERS TECHNOLOGIQUE
13435_Obs4_ste_chap-13_ep4.indd 300 2015-01-22 5:48 PM
15 a) Ce treuil mécanique comporte un système de transformation du mouvement. Quel est
CHAPITRE 13
le nom de ce système ?
Un système à pignon et à crémaillère.
b) Quel est l’organe moteur de ce système ?
Le pignon.
c) Quel est l’organe mené de ce système ?
La crémaillère.
d) Ce système de transformation du mouvement peut-il être réversible ? Explique
ta réponse.
Exemple de réponse. Oui, ce système peut être réversible. Habituellement, le pignon est
l’organe moteur. Il pivote lorsqu’on utilise la manivelle pour tendre le filet, entraînant
ainsi la crémaillère. Cependant, si on tendait le filet en tirant dessus, ce serait alors la
crémaillère qui deviendrait l’organe moteur.
16 Décris l’interaction entre chacune des paires d’éléments suivants.
a) La poignée et la manivelle.
En appliquant une force sur la poignée, la manivelle est entraînée dans un mouvement
de rotation.
b) La manivelle et le pignon.
La manivelle transmet son mouvement de rotation au pignon.
c) Le pignon et la crémaillère.
Le mouvement de rotation du pignon est transformé en mouvement de translation de
la crémaillère.
© ERPI Reproduction interdite
d) Le pignon et la roue dentée.
Le mouvement de rotation du pignon est transmis à la roue dentée.
e) Le cliquet et la roue dentée.
Le cliquet bloque le mouvement de rappel de la roue dentée, du pignon et de la
crémaillère qui pourrait être induit lorsque le filet est tendu et tend à se détendre.
CHAPITRE 13 L’INGÉNIERIE MÉCANIQUE 301
13435_Obs4_ste_chap-13_ep4.indd 301 2015-01-22 5:48 PM
17 Ce treuil mécanique comporte plusieurs liaisons. Dans un dessin à vue éclatée, les pièces
CHAPITRE 13
démontables sont séparées les unes des autres. Donne les caractéristiques des liaisons
entre les paires d’éléments suivantes :
a) La poignée et la manivelle. b) La manivelle et le pignon.
Directe. Indirecte.
Rigide. Rigide.
Indémontable. Démontable.
Totale. Totale.
c) La crémaillère et le corps. d) Le cliquet et le corps.
Directe. Indirecte.
Rigide. Rigide.
Démontable. Démontable.
Partielle. Partielle.
18 Ce treuil mécanique fonctionne à l’aide de quelques guidages. Remplis les cases pour chacune
des paires d’éléments suivants.
Paire d’éléments Pièce guidée Organe de guidage Type de guidage
Crémaillère
Crémaillère. Corps. Translation.
et corps
Cliquet
Cliquet. Vis. Rotation.
et vis
Pignon
Pignon. Corps. Rotation.
et corps
19 Combien de degrés de liberté offre le corps pour la crémaillère ? Précise également le ou
les types de mouvements indépendants possibles.
Degrés de liberté : 1
Types de mouvements indépendants possibles : Translation par rapport à l’axe y (Ty).
© ERPI Reproduction interdite
20 Combien de degrés de liberté offre le corps pour le pignon ? Précise également le ou les
types de mouvements indépendants possibles.
Degrés de liberté : 1
Types de mouvements indépendants possibles : Rotation par rapport à l’axe x (Rx).
21 Selon toi, est-il plus avantageux de favoriser le frottement entre le pignon et le corps
du treuil ou, au contraire, de le défavoriser ? Explique ta réponse.
Il est plus avantageux de défavoriser le frottement entre ces deux pièces. S’il y a trop
de frottement, il sera difficile de tourner la manivelle et de tendre le filet.
302 L’UNIVERS TECHNOLOGIQUE
13435_Obs4_ste_chap-13_ep4.indd 302 2015-01-22 5:48 PM
Vous aimerez peut-être aussi
- ssp304 FDocument52 pagesssp304 FDavePas encore d'évaluation
- MetrologieDocument227 pagesMetrologiemicipsa100% (3)
- Systeme Hydrauliques Et Pneumatiques l3 CM PDFDocument30 pagesSysteme Hydrauliques Et Pneumatiques l3 CM PDFmimi mimPas encore d'évaluation
- AssemblageDocument36 pagesAssemblagejaafar al0% (1)
- Liebherr Électrique 312Document22 pagesLiebherr Électrique 312LiebherrPas encore d'évaluation
- Exercices Isolants ConducteursDocument2 pagesExercices Isolants Conducteurswalid. ytPas encore d'évaluation
- Examen Ch11 CompletDocument3 pagesExamen Ch11 CompletShirine GhaffariPas encore d'évaluation
- MEC3 MobiliteDocument7 pagesMEC3 Mobiliter_prePas encore d'évaluation
- AitBelkacemDihia AbdiCyliaDocument71 pagesAitBelkacemDihia AbdiCyliaMohamed TdPas encore d'évaluation
- TRAVAUX DIRIGES - Énergétiques - CopierDocument2 pagesTRAVAUX DIRIGES - Énergétiques - CopierSawadogoPas encore d'évaluation
- Procedes D'asemblageDocument85 pagesProcedes D'asemblageImed SeghierPas encore d'évaluation
- 1-Le Schéma Cinématique Des MécanismesDocument8 pages1-Le Schéma Cinématique Des MécanismesSegaAlainCoulibalyPas encore d'évaluation
- TP ContacteurDocument18 pagesTP ContacteurChristine JessPas encore d'évaluation
- Capteur de NiveauDocument12 pagesCapteur de NiveauAsm MaPas encore d'évaluation
- Caractères de LiaisonDocument5 pagesCaractères de LiaisonGuy Effa100% (1)
- Liaisons MecaniqueDocument39 pagesLiaisons MecaniqueHarouna MambonéPas encore d'évaluation
- ASSIF LiaisonsDocument31 pagesASSIF LiaisonsMeryem TamirPas encore d'évaluation
- ASSIF LiaisonsDocument31 pagesASSIF Liaisonssalma al khazrajiPas encore d'évaluation
- 3 - Liaisons MecaniquesDocument6 pages3 - Liaisons MecaniquesYoucef MimouniPas encore d'évaluation
- Liaisons MécaniquesDocument14 pagesLiaisons MécaniquesTalel MissaouiPas encore d'évaluation
- Examen Ch11 (1) 1Document3 pagesExamen Ch11 (1) 1Shirine GhaffariPas encore d'évaluation
- Liaisons Mecaniques PDFDocument9 pagesLiaisons Mecaniques PDFOmar BerkachePas encore d'évaluation
- 2 Liaisonsmcaniques 9 PagesDocument10 pages2 Liaisonsmcaniques 9 PagesbeniePas encore d'évaluation
- Interactions G Evaluation C11Document7 pagesInteractions G Evaluation C11Shirine Ghaffari100% (1)
- Liaisons 2Document8 pagesLiaisons 2BIOS_012100% (1)
- Chapitre 2Document10 pagesChapitre 2skaachPas encore d'évaluation
- Resumé Cours MITPDocument13 pagesResumé Cours MITPMahdi BensalemPas encore d'évaluation
- Exposé Bureau D'etudesDocument29 pagesExposé Bureau D'etudesLaël HounsounonPas encore d'évaluation
- PTSI - TD Analyse Des MecanismesDocument6 pagesPTSI - TD Analyse Des MecanismesprincePas encore d'évaluation
- CH 3 Liaisons Mécaniques 2022 PDFDocument4 pagesCH 3 Liaisons Mécaniques 2022 PDFAymen NekkaaPas encore d'évaluation
- Chapt1 Int Com Bras Manp Ind NewDocument9 pagesChapt1 Int Com Bras Manp Ind NewMaroua TouilPas encore d'évaluation
- Devoir Synthese N 2 Classe 1s 2023Document4 pagesDevoir Synthese N 2 Classe 1s 2023Graoui LeilaPas encore d'évaluation
- 2 Chapitre2 Modelisation Des MécanismesDocument9 pages2 Chapitre2 Modelisation Des Mécanismesmohammed belhadj kelkal100% (1)
- Les Liaisons Doc Prof 11Document9 pagesLes Liaisons Doc Prof 11brhamza39Pas encore d'évaluation
- Bulletin: Des ExercicesDocument14 pagesBulletin: Des ExercicesulabjtaPas encore d'évaluation
- Aide Memoire TechnoDocument15 pagesAide Memoire TechnoLyly LylyPas encore d'évaluation
- Analyse Objet Technique 2020Document8 pagesAnalyse Objet Technique 2020z.sthilaire74Pas encore d'évaluation
- Obs4 Ste Ch14 Act Suppl CorrDocument6 pagesObs4 Ste Ch14 Act Suppl CorrMarie Soleil FoucaultPas encore d'évaluation
- Tolerances Cotation FonctionnelleDocument83 pagesTolerances Cotation Fonctionnelleأحمد الموريتاني100% (1)
- Travail D'analyse Techno STDocument4 pagesTravail D'analyse Techno STcharettelepinePas encore d'évaluation
- Fonctions Mecaniques Maitre PDFDocument7 pagesFonctions Mecaniques Maitre PDFMahamadou SackoPas encore d'évaluation
- Caracterisation LiaisonDocument12 pagesCaracterisation Liaisondid TouzoPas encore d'évaluation
- Intro SCDocument13 pagesIntro SCAyyoub DAHBIPas encore d'évaluation
- Liaison Hélicoidale ProfDocument12 pagesLiaison Hélicoidale ProftounsiPas encore d'évaluation
- Chapitre 2 MODELISATION DES LIAISONSDocument15 pagesChapitre 2 MODELISATION DES LIAISONSChaker Chaoual100% (1)
- 504 TP Contacteur CorrectionDocument20 pages504 TP Contacteur CorrectionsofianePas encore d'évaluation
- Cours de Physique de S-CDocument20 pagesCours de Physique de S-CPapy KabeyaPas encore d'évaluation
- Les Liaisons Doc Prof MOUKHTARIDocument9 pagesLes Liaisons Doc Prof MOUKHTARIELMustaphaELMoukhtariPas encore d'évaluation
- Liaisons MécaniquesDocument4 pagesLiaisons MécaniquesRhô ThalesPas encore d'évaluation
- Liaison EncastrementDocument16 pagesLiaison EncastrementCamara MahamadouPas encore d'évaluation
- 31-Caractere Des LiaisonsDocument8 pages31-Caractere Des LiaisonsManal El Matmour M'hairPas encore d'évaluation
- ContacteurDocument19 pagesContacteurmbilasiracidePas encore d'évaluation
- Cellule Photovolataique PDFDocument3 pagesCellule Photovolataique PDFnouhailaPas encore d'évaluation
- TP Statique Graphique DragonDocument2 pagesTP Statique Graphique DragonBassem Bhiri100% (1)
- Sciences de L'ingénieurDocument2 pagesSciences de L'ingénieurGuy YgalPas encore d'évaluation
- Bacpro Eleec: Appareil de DistributionDocument19 pagesBacpro Eleec: Appareil de Distribution99malfrat drxugsPas encore d'évaluation
- Chapitre 1 - Liaisons Mécaniques - Partie 1Document4 pagesChapitre 1 - Liaisons Mécaniques - Partie 1Loic ReyesPas encore d'évaluation
- Les Liaisons Mécaniques 2022Document10 pagesLes Liaisons Mécaniques 2022simo ockPas encore d'évaluation
- Cours Modèl Liaison AjustementsDocument70 pagesCours Modèl Liaison AjustementssawadogoPas encore d'évaluation
- Modelisation Des Liaisons: MécaniqueDocument15 pagesModelisation Des Liaisons: MécaniqueSimo StitPas encore d'évaluation
- Chap II Reactions D Appuis Sollicitation Internes VFDocument44 pagesChap II Reactions D Appuis Sollicitation Internes VFyoulmafia99Pas encore d'évaluation
- Cours Chaines de Puissance 2015Document10 pagesCours Chaines de Puissance 2015semahPas encore d'évaluation
- TD3sujet PDFDocument5 pagesTD3sujet PDFYounes OumaimounPas encore d'évaluation
- Table Élévatrice Etude BibliographiqueDocument12 pagesTable Élévatrice Etude BibliographiqueTNskill TNskillPas encore d'évaluation
- Ticemlal Fella Bouhaddi AminaDocument94 pagesTicemlal Fella Bouhaddi Aminaabdo charapoPas encore d'évaluation
- Hadj Aissa KahlaouiDocument81 pagesHadj Aissa KahlaouiAhmed EllouzePas encore d'évaluation
- 6 Connaitre Les PictogrammeDocument26 pages6 Connaitre Les Pictogrammehariz harizPas encore d'évaluation
- TD Régulation Et Asservissement 2Document5 pagesTD Régulation Et Asservissement 2Ilyess HamdiPas encore d'évaluation
- Roue Libre PDFDocument4 pagesRoue Libre PDFAbdelmajid AittalebPas encore d'évaluation
- Swegon 0515 PDFDocument24 pagesSwegon 0515 PDFbermisuPas encore d'évaluation
- TD MCCDocument6 pagesTD MCCabdeljalil chouikhPas encore d'évaluation
- Corp RapportDocument26 pagesCorp RapportChris 2La Novelle AlioncePas encore d'évaluation
- Dx225lca FRDocument18 pagesDx225lca FRPoliana AvelarPas encore d'évaluation
- Sujet E51 2015Document21 pagesSujet E51 2015Wafa BouzidPas encore d'évaluation