Vous aimerez peut-être aussi
- Theme Transfert ExamenDocument2 pagesTheme Transfert Examenjd9c8jtyg7Pas encore d'évaluation
- tp7 Freinage Machine Asynchrone Injection Courant ContinuDocument4 pagestp7 Freinage Machine Asynchrone Injection Courant ContinuGlodi Maestro MbwamaPas encore d'évaluation
- 2-Schemas D'electricite IndustrielleDocument33 pages2-Schemas D'electricite IndustrielleYoussouf Yaou Seini100% (3)
- 13-Démarrage Étoile-Triangle 2 Sens de Marche Avec Fin de CourseDocument1 page13-Démarrage Étoile-Triangle 2 Sens de Marche Avec Fin de CourseMerveil Borgeas100% (1)
- Faculte Des Sciences Et Techniques Tanger Departement Genie ElectriqueDocument3 pagesFaculte Des Sciences Et Techniques Tanger Departement Genie Electriquenada mojahidPas encore d'évaluation
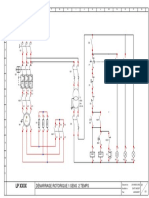
- Demarrage Rotorique 1 Sens 2 TempsDocument1 pageDemarrage Rotorique 1 Sens 2 TempsMouhamed Sàrr CissePas encore d'évaluation
- TD Distribuer Electrique Pneumarique24MDocument8 pagesTD Distribuer Electrique Pneumarique24MIsmail EzzaherPas encore d'évaluation
- Comprendre Le Fonctionnement D'Un Systeme Electrique: Mi V 13 F1Document6 pagesComprendre Le Fonctionnement D'Un Systeme Electrique: Mi V 13 F1KOUADIO PATRICEPas encore d'évaluation
- Demarrage PAR AUTO TRDocument1 pageDemarrage PAR AUTO TRnabil boughaniPas encore d'évaluation
- Analyse de Fonctionnement: Moteur Asynchrone Tri.: Démarrage Direct 1 SensDocument7 pagesAnalyse de Fonctionnement: Moteur Asynchrone Tri.: Démarrage Direct 1 SensdidierpietquinPas encore d'évaluation
- Folio 1Document2 pagesFolio 1El Hadji Mandella NdiayePas encore d'évaluation
- Démarrage Étoile-Triangle 2 SensDocument1 pageDémarrage Étoile-Triangle 2 Sensantonella0% (1)
- Demarrage Direct 2 Sens de Rotation: CFP Don BoscoDocument2 pagesDemarrage Direct 2 Sens de Rotation: CFP Don BoscoMerveil BorgeasPas encore d'évaluation
- Demarrage Statorique 2 Sens 3 TempsDocument1 pageDemarrage Statorique 2 Sens 3 TempsAssia Saoudi100% (2)
- Dessin Électrique Et Schémas de Systèmes Automatiques: L1 L2 L3 NDocument6 pagesDessin Électrique Et Schémas de Systèmes Automatiques: L1 L2 L3 NDayan Van RillaertPas encore d'évaluation
- Shema MultifilaireDocument1 pageShema MultifilaireKouki NizarPas encore d'évaluation
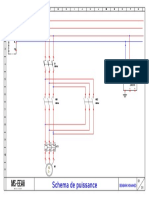
- Shema de PuissanceDocument1 pageShema de PuissanceMohamed BenbarkPas encore d'évaluation
- Schémas Classiques Des Moteurs AsynchronesDocument23 pagesSchémas Classiques Des Moteurs AsynchronesAZERTY darkPas encore d'évaluation
- Demarrage Etoile-Triangle 1 SensDocument1 pageDemarrage Etoile-Triangle 1 SensShane LendoyePas encore d'évaluation
- 5490 Cap FC Ep2 2013Document13 pages5490 Cap FC Ep2 2013Serge KewouPas encore d'évaluation
- Moncharge Numero 2Document4 pagesMoncharge Numero 2saloumPas encore d'évaluation
- Démarrage Direct 1 Sens de RotationDocument1 pageDémarrage Direct 1 Sens de RotationHouili MohamedPas encore d'évaluation
- Exemple 06 - Démarrage Étoile-TriangleDocument1 pageExemple 06 - Démarrage Étoile-TriangleEl Kachani AbderrahmanPas encore d'évaluation
- Demarrage Etoile-Triangle 2 SensDocument1 pageDemarrage Etoile-Triangle 2 SensEl Kachani Abderrahman60% (5)
- Démarrage Direct 2 SensDocument1 pageDémarrage Direct 2 Sensantonella100% (1)
- TD Percage de PieceDocument3 pagesTD Percage de Pieceoussama100% (1)
- TD Percage de PieceDocument3 pagesTD Percage de PieceIlyes BeyPas encore d'évaluation
- TP1 3Document2 pagesTP1 3Merveil BorgeasPas encore d'évaluation
- Module Sécu Câblage 2014Document6 pagesModule Sécu Câblage 2014shaggyPas encore d'évaluation
- Inversion Moteur Monophase 4 ConducteursDocument1 pageInversion Moteur Monophase 4 ConducteursKABREPas encore d'évaluation
- TD2 - Démarrage 2sensDocument5 pagesTD2 - Démarrage 2sensnada mojahidPas encore d'évaluation
- Demarrage Rotorique 2 Sens 3 TempsDocument1 pageDemarrage Rotorique 2 Sens 3 TempsShane Lendoye100% (1)
- Tp5 Demarrage Directe Deux Sens Rotation Avec Butee Fin de CourseDocument4 pagesTp5 Demarrage Directe Deux Sens Rotation Avec Butee Fin de CourseabdrahmmanmoulouzPas encore d'évaluation
- Demarrage MoteurDocument15 pagesDemarrage MoteurAndré KAFANDOPas encore d'évaluation
- Demarrage MoteurDocument15 pagesDemarrage MoteurIsmael ZerboPas encore d'évaluation
- Tp4 Demarrage Directe Deux Sens Rotation Avec Butee Fin de CourseDocument5 pagesTp4 Demarrage Directe Deux Sens Rotation Avec Butee Fin de CourseHAHAPas encore d'évaluation
- TP CablageDocument7 pagesTP CablageMartinien YawoloPas encore d'évaluation
- Montage Moteur Dahlander 2 Sens de RotationDocument1 pageMontage Moteur Dahlander 2 Sens de RotationShane Lendoye100% (1)
- Chapitre 5 - Protection, Dimensionnement Et Endtrainement À Vitesse Variable - MTDocument20 pagesChapitre 5 - Protection, Dimensionnement Et Endtrainement À Vitesse Variable - MThamzaPas encore d'évaluation
- BusinesscardDocument1 pageBusinesscard李小华Pas encore d'évaluation
- demarrage_de_trois_moteurs_en_etoile_triangle_les_uns_apres_les_autresDocument1 pagedemarrage_de_trois_moteurs_en_etoile_triangle_les_uns_apres_les_autresMohamed DabboussiPas encore d'évaluation
- Correction TD Percage Piec00000eDocument8 pagesCorrection TD Percage Piec00000eHoussineElGhazouaniPas encore d'évaluation
- Demarrage Direct 1 Sens de Rotation .Document1 pageDemarrage Direct 1 Sens de Rotation .Chems Eddine HachaniPas encore d'évaluation
- Modes Dã©marrage1Document6 pagesModes Dã©marrage1DIC 1 G.EPas encore d'évaluation
- Chapitre 4 Les Procedes de FreinageDocument12 pagesChapitre 4 Les Procedes de Freinagegladiateur batnaPas encore d'évaluation
- Chapitre 4 Les Procedes de FreinageDocument11 pagesChapitre 4 Les Procedes de FreinageSamroura YessadPas encore d'évaluation
- TD Percage de PieceDocument5 pagesTD Percage de Piecevalou cnPas encore d'évaluation
- Chapitre 2 Les Circuits MagnetiquesDocument5 pagesChapitre 2 Les Circuits MagnetiquesMoh Abd BenPas encore d'évaluation
- TD 1 29Document9 pagesTD 1 29Abdelmadjid BatirPas encore d'évaluation
- Regles ReperageDocument18 pagesRegles ReperageAboubaker SadikPas encore d'évaluation
- TD 2: Etude Des Circuits HydrauliquesDocument6 pagesTD 2: Etude Des Circuits HydrauliquesYahya MamloutPas encore d'évaluation
- DST de MTSDocument5 pagesDST de MTSMPONGUIPas encore d'évaluation
- Demarrage Statorique 1 Sens 2 TempsDocument1 pageDemarrage Statorique 1 Sens 2 TempsShane LendoyePas encore d'évaluation
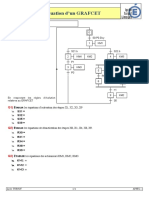
- Mise en Équation D'un GRAFCET: Prénom NomDocument1 pageMise en Équation D'un GRAFCET: Prénom NomFatou ThiounePas encore d'évaluation
- Circuit de Commande - Sauvegarde 19-12-2022Document1 pageCircuit de Commande - Sauvegarde 19-12-2022Jawher BouguerraPas encore d'évaluation
- ST-01schema Industriels PDFDocument3 pagesST-01schema Industriels PDFSami Debbache100% (1)
- TD 1Document4 pagesTD 1Chehira DoghmenPas encore d'évaluation
- Les Techniques de Collecte de DonnéesDocument3 pagesLes Techniques de Collecte de DonnéesLasmer ChadiPas encore d'évaluation
- 7509 Sujet Ett Sti2d Juin2016Document31 pages7509 Sujet Ett Sti2d Juin2016Leo RzepeckiPas encore d'évaluation
- Slow Down (The Academy Is... ) Sheet MusicDocument8 pagesSlow Down (The Academy Is... ) Sheet MusicsitonchairsPas encore d'évaluation
- TP Equation de Bernoulli - UMBB STHDocument25 pagesTP Equation de Bernoulli - UMBB STHmourad100% (1)
- MémoireDocument71 pagesMémoireSia BoualemPas encore d'évaluation
- Guide Compteur SagemDocument27 pagesGuide Compteur SagemKris Moutoussamy0% (1)
- 4 Cours MOS RulesDocument4 pages4 Cours MOS RulesWeld MedninePas encore d'évaluation
- Money Transfer - Global Money Transfer - Western UnionDocument3 pagesMoney Transfer - Global Money Transfer - Western UnionHADER MerwanPas encore d'évaluation
- Transcription Tom Ferry StratégiesDocument9 pagesTranscription Tom Ferry StratégiesYassine BellemlihPas encore d'évaluation
- Design Guide Residential System LIT-226-FRDocument27 pagesDesign Guide Residential System LIT-226-FRSADJI RachidPas encore d'évaluation
- Formation DolibarrDocument28 pagesFormation DolibarrwildqafPas encore d'évaluation
- 11235105-Madisec-06-Coupes VenteDocument1 page11235105-Madisec-06-Coupes VenteMARTINPas encore d'évaluation
- HTTPS ProxiesDocument27 pagesHTTPS ProxiesTopX RomaniaPas encore d'évaluation
- TP Automatisme IndustrielDocument5 pagesTP Automatisme IndustrielOussama Abdesslam AÏSSAPas encore d'évaluation
- Ko Rgam40-43 I224igbfe03 09Document35 pagesKo Rgam40-43 I224igbfe03 09Eder Rodriguez Moreno0% (1)
- Coffrage VoilesDocument46 pagesCoffrage VoilesBoucharebKarimPas encore d'évaluation
- 01 IntroductionDocument45 pages01 IntroductionhsebillalPas encore d'évaluation
- Poly Si MeriseDocument112 pagesPoly Si MeriseZaid ZizouPas encore d'évaluation
- Corrigé - Analyse Des DonnéesDocument17 pagesCorrigé - Analyse Des DonnéesHamid SAMAKIPas encore d'évaluation
- Comparaison Entre Schema de Procede Et Schema Tuyauterie Et InstrumentationDocument12 pagesComparaison Entre Schema de Procede Et Schema Tuyauterie Et InstrumentationAbo KolouPas encore d'évaluation
- TP Thermo Selkh AymenDocument10 pagesTP Thermo Selkh AymenWail JpPas encore d'évaluation
- tcvn93522012906946 2447Document297 pagestcvn93522012906946 2447Viet Anh PhamPas encore d'évaluation
- H. L. D. Rivail - Cours Pratique Et Théorique D'arithmétique - Tome SecondDocument402 pagesH. L. D. Rivail - Cours Pratique Et Théorique D'arithmétique - Tome SecondÊNIOPas encore d'évaluation
- Solutions D'administration Pour Business Objects: 360suiteDocument14 pagesSolutions D'administration Pour Business Objects: 360suitegoiffon sebastienPas encore d'évaluation
- BODACC-B 20110105 0001 p000Document112 pagesBODACC-B 20110105 0001 p000Josephine BonjourPas encore d'évaluation
- Formation JDF: Division ForageDocument115 pagesFormation JDF: Division ForageمحمدPas encore d'évaluation
- Cours de 2STE TransmissionDocument40 pagesCours de 2STE TransmissionJeulin Marabou60% (5)
- Strategie Developpement Desserte Aerienne TunisairDocument65 pagesStrategie Developpement Desserte Aerienne TunisairOns Hafaiedh100% (1)
- CASE SR130/SR150/SR175/SV185/ SR200/SR220/SR250/SV250/SV300: Schema Electrique, Monde Entier Production 2011Document16 pagesCASE SR130/SR150/SR175/SV185/ SR200/SR220/SR250/SV250/SV300: Schema Electrique, Monde Entier Production 2011Rached DouahchuaPas encore d'évaluation