Vous aimerez peut-être aussi
- Devoir de Controle N1-2as-2022Document4 pagesDevoir de Controle N1-2as-2022GR GARMANI100% (2)
- Devoir de Synthèse N°1 2019 2020 (MR Ben Aouicha)Document10 pagesDevoir de Synthèse N°1 2019 2020 (MR Ben Aouicha)Piere EbrahimPas encore d'évaluation
- DEVOIRS DE SYNTHESE N1-2010-1AS-Machine À Coller Les ÉtiquettesDocument4 pagesDEVOIRS DE SYNTHESE N1-2010-1AS-Machine À Coller Les Étiquettessghaierfarid100% (1)
- Freitafloor EP 2MMDocument2 pagesFreitafloor EP 2MMYog SothothPas encore d'évaluation
- Devoir de Synthèse N°1 - Technologie - Antenne Telescopique - Poste Automatique de Remplissage Et de Fermeture de Paquets - 2ème Sciences (2016-2017) MR Zouhaier RihaneDocument6 pagesDevoir de Synthèse N°1 - Technologie - Antenne Telescopique - Poste Automatique de Remplissage Et de Fermeture de Paquets - 2ème Sciences (2016-2017) MR Zouhaier RihaneAbdelkader Zidane0% (1)
- Devoir de Synthèse N°1 - Technologie - Poste Automatique de Perçage - 2ème Sciences (2016-2017) MR HammiDocument6 pagesDevoir de Synthèse N°1 - Technologie - Poste Automatique de Perçage - 2ème Sciences (2016-2017) MR HammiamaniPas encore d'évaluation
- Application 2Document8 pagesApplication 2Foued RjibaPas encore d'évaluation
- Ds2-2ème-Pot de Fleurs 2020-2021Document10 pagesDs2-2ème-Pot de Fleurs 2020-2021Adam BensaidPas encore d'évaluation
- Devoir de Synthèse N°1 - Technologie - 2ème Sciences Exp (2010-2011) MR KrikidDocument7 pagesDevoir de Synthèse N°1 - Technologie - 2ème Sciences Exp (2010-2011) MR Krikidأبوأحمد الجزيري100% (2)
- Dev 1 SDocument4 pagesDev 1 SKhaled MaamriPas encore d'évaluation
- Devoir de Synthèse N°1 - Technologie - 2ème Sciences (2014-2015) MR Abdallah RaouafiDocument6 pagesDevoir de Synthèse N°1 - Technologie - 2ème Sciences (2014-2015) MR Abdallah RaouafiMeriem Abdelhafidh0% (1)
- Devoir de Synthèse N°2 - Technologie MALAXEUR DE SABLE - Bac Technique (2010-2011) MR ZAAFOURI MehrezDocument5 pagesDevoir de Synthèse N°2 - Technologie MALAXEUR DE SABLE - Bac Technique (2010-2011) MR ZAAFOURI MehrezAmira JebaliPas encore d'évaluation
- Devoir de Synthèse N°1 - Génie Électrique - Bac Technique (2011-2012) MR Raouafi AbdallahDocument4 pagesDevoir de Synthèse N°1 - Génie Électrique - Bac Technique (2011-2012) MR Raouafi AbdallahFethi BenmassoudePas encore d'évaluation
- dcn1 2020 3t2 Pince CorrectionDocument4 pagesdcn1 2020 3t2 Pince CorrectionGuiliassPas encore d'évaluation
- 02 - Système Automatique de Marquage de Boîtiers (DR)Document4 pages02 - Système Automatique de Marquage de Boîtiers (DR)FM HELSENKI0% (2)
- S U J e T: Poste Automatique D'agrafage Et D'étiquetage Des Caisses en CartonDocument7 pagesS U J e T: Poste Automatique D'agrafage Et D'étiquetage Des Caisses en Cartonbejaoui100% (1)
- Devoir de Synthèse N1 2EA 2022Document7 pagesDevoir de Synthèse N1 2EA 2022Nadia SahliPas encore d'évaluation
- 3-Devoir+de+synthese +N1-2AS-2021Document4 pages3-Devoir+de+synthese +N1-2AS-2021amri mohamedPas encore d'évaluation
- 2-Devoir de Controle N1-2AS-2021Document7 pages2-Devoir de Controle N1-2AS-2021amri mohamedPas encore d'évaluation
- Devoir de Contrôle N°1 - Technologie Poste Automatique de Pliage Et de Découpage - 2ème Sciences (2012-2013) MR BAAZAOUI RaoufDocument4 pagesDevoir de Contrôle N°1 - Technologie Poste Automatique de Pliage Et de Découpage - 2ème Sciences (2012-2013) MR BAAZAOUI Raoufchaouachi alarbiPas encore d'évaluation
- BAC 2016 Sciences de Lingénieur SMBDocument18 pagesBAC 2016 Sciences de Lingénieur SMBchaouch.najehPas encore d'évaluation
- 3-Devoir de Controle N1-2AS-2021Document5 pages3-Devoir de Controle N1-2AS-2021Rasmi BaananouPas encore d'évaluation
- DC1 2as Nov 2022Document4 pagesDC1 2as Nov 2022Hae LinPas encore d'évaluation
- Devoir de Contrôle N°1 - Technologie Machine À Cambrer - 2ème Sciences Exp (2011-2012) MR NouarDocument4 pagesDevoir de Contrôle N°1 - Technologie Machine À Cambrer - 2ème Sciences Exp (2011-2012) MR Nouarأبوأحمد الجزيريPas encore d'évaluation
- Correction Devoir+de+Controle+N2 2AS+ Perceuse+Rotative 2021Document5 pagesCorrection Devoir+de+Controle+N2 2AS+ Perceuse+Rotative 2021aliPas encore d'évaluation
- Mme Toumi Imen Système Unité D'usinageDocument6 pagesMme Toumi Imen Système Unité D'usinageKamel TayahiPas encore d'évaluation
- Correction Devoir de Controle n2 Grafcet 2as 2022Document4 pagesCorrection Devoir de Controle n2 Grafcet 2as 2022GR GARMANIPas encore d'évaluation
- Devoir de Contrôle N°1 - Technologie - Poste de Remplissage Des Bouteilles en Gaz - 1ère AS (2018-2019) MR Raouafi AbdallahDocument4 pagesDevoir de Contrôle N°1 - Technologie - Poste de Remplissage Des Bouteilles en Gaz - 1ère AS (2018-2019) MR Raouafi AbdallahTitan CR YZ100% (1)
- Pliage Grafcet+LadderDocument7 pagesPliage Grafcet+LadderIlias EmsaPas encore d'évaluation
- Embrayages Frein 10 11 12Document8 pagesEmbrayages Frein 10 11 12Ah MédPas encore d'évaluation
- Devoir de Synthese N3 - Technologie - 2eme Sciences (2007-2008) Mme Toumi Imen-Systeme de Chargement de Sable de MoulageDocument6 pagesDevoir de Synthese N3 - Technologie - 2eme Sciences (2007-2008) Mme Toumi Imen-Systeme de Chargement de Sable de MoulageKamel Bousnina100% (1)
- Devoir de Contrôle N°1 - Génie Électrique - Bac Technique (2010-2011) MR Abdallah Raouafi PDFDocument4 pagesDevoir de Contrôle N°1 - Génie Électrique - Bac Technique (2010-2011) MR Abdallah Raouafi PDFAkram Ben Khemis50% (2)
- Devoir de Contrôle N°1 - Technologie - 1ère AS (2009-2010)Document0 pageDevoir de Contrôle N°1 - Technologie - 1ère AS (2009-2010)saded05Pas encore d'évaluation
- Etude TC 2016 SUJET 21 11 2013Document14 pagesEtude TC 2016 SUJET 21 11 2013Ben Aissa ChokriPas encore d'évaluation
- 8c5mn-Poste Automatique de Decoupage de Marbre PDFDocument3 pages8c5mn-Poste Automatique de Decoupage de Marbre PDFIbra MoulayPas encore d'évaluation
- Grafcet 2 ASDocument10 pagesGrafcet 2 AShammamin2008Pas encore d'évaluation
- 1A Devoir de Synthèse N°2 - TM 2014Document6 pages1A Devoir de Synthèse N°2 - TM 2014Kamel TayahiPas encore d'évaluation
- Devoir de Synthèse N°1 - Technologie - 3ème Technique (2010-2011) MR Abdallah RaouafiDocument4 pagesDevoir de Synthèse N°1 - Technologie - 3ème Technique (2010-2011) MR Abdallah RaouafiOthman TmarPas encore d'évaluation
- Ex 3 2steDocument4 pagesEx 3 2steHicham MarzouqPas encore d'évaluation
- Devoir de Contrôle N°1 - Technologie - POSTE AUTOMATIQUE DE DECOUPAGE ET DE PLIAGE - 2ème Sciences (2016-2017) MR Mighri LotfiDocument4 pagesDevoir de Contrôle N°1 - Technologie - POSTE AUTOMATIQUE DE DECOUPAGE ET DE PLIAGE - 2ème Sciences (2016-2017) MR Mighri Lotfihaykel71100% (1)
- Série de TD N-1Document2 pagesSérie de TD N-1khaled kamel BouabdallahPas encore d'évaluation
- Présentation Du SujetDocument2 pagesPrésentation Du SujetMohsen Saidi100% (1)
- Devoir de Synthèse N°1 - Génie Électrique - 3ème Technique (2012-2013) MR KhiariDocument5 pagesDevoir de Synthèse N°1 - Génie Électrique - 3ème Technique (2012-2013) MR KhiariAbidi NawresPas encore d'évaluation
- TD Verin Simple Effet eDocument5 pagesTD Verin Simple Effet eBenmeddour Omar100% (1)
- Devoir de Synthèse N°3 - Technologie Antenne Parabolique - 1ère AS (2010-2011) MR BAAZAOUI RaoufDocument6 pagesDevoir de Synthèse N°3 - Technologie Antenne Parabolique - 1ère AS (2010-2011) MR BAAZAOUI RaoufChihab GhlalaPas encore d'évaluation
- Devoir de Controle N1Document4 pagesDevoir de Controle N1sarah09112008Pas encore d'évaluation
- 4-Devoir de Synthese - Collage Etiquettes-2022Document6 pages4-Devoir de Synthese - Collage Etiquettes-2022TarekMostaphaPas encore d'évaluation
- Zaghouan Systeme de Traitement Thermique: Devoir de Synthese N°3Document3 pagesZaghouan Systeme de Traitement Thermique: Devoir de Synthese N°3Quincaillerie Ben MansourPas encore d'évaluation
- Devoir de Synthèse N°1 2011 2012 (Abdallah Raouafi)Document5 pagesDevoir de Synthèse N°1 2011 2012 (Abdallah Raouafi)Piere EbrahimPas encore d'évaluation
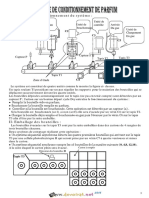
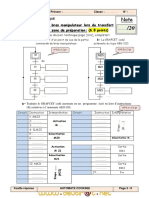
- Devoir de Contrôle N°1 - Génie Mécanique - Conditionnement de Parfum - 3ème Technique (2016-2017) MR MezniDocument7 pagesDevoir de Contrôle N°1 - Génie Mécanique - Conditionnement de Parfum - 3ème Technique (2016-2017) MR MezniŚą ŅăPas encore d'évaluation
- Corrigé Synthése ESA 2022 (TEST3)Document10 pagesCorrigé Synthése ESA 2022 (TEST3)otmane touilPas encore d'évaluation
- Auto - 1 - 2023 OkDocument8 pagesAuto - 1 - 2023 OkfjosephfabricePas encore d'évaluation
- Devoir de Contrôle N°2 - Génie Mécanique - Mécanisme D'entrainement Du Plateau Tournant - Bac Technique (2017-2018) MR MR GHORBEL MamdouhDocument8 pagesDevoir de Contrôle N°2 - Génie Mécanique - Mécanisme D'entrainement Du Plateau Tournant - Bac Technique (2017-2018) MR MR GHORBEL MamdouhAmira JebaliPas encore d'évaluation
- TD Grafcet Yaourt Taches-ConvertiDocument6 pagesTD Grafcet Yaourt Taches-ConvertiMohamedPas encore d'évaluation
- Devoir de Synthèse N°1 - Technologie - 2ème Sciences (2008-2009) Mme Toumi Imen Système Poste de Sertissage de Boites de TomatesDocument6 pagesDevoir de Synthèse N°1 - Technologie - 2ème Sciences (2008-2009) Mme Toumi Imen Système Poste de Sertissage de Boites de TomatesLassaad HamdiPas encore d'évaluation
- DT - Système de Production Des Godets de YaourtDocument6 pagesDT - Système de Production Des Godets de YaourtIsmail Ezzine100% (1)
- Devoir de Contrôle N°1 - Technologie - 1ère AS (2009-2010) 2 PDFDocument3 pagesDevoir de Contrôle N°1 - Technologie - 1ère AS (2009-2010) 2 PDFأبوأحمد الجزيريPas encore d'évaluation
- Devoir de SynthèseDocument4 pagesDevoir de SynthèselachhelPas encore d'évaluation
- DPM21 22Document4 pagesDPM21 22jetlaoui frajPas encore d'évaluation
- DS1 - DMéc - Cellule Flexible D'usinageDocument3 pagesDS1 - DMéc - Cellule Flexible D'usinageElafif HamdiPas encore d'évaluation
- Lycée Habib Thameur: Ecrou SerréDocument6 pagesLycée Habib Thameur: Ecrou SerréAbdelmajid ZouaghiPas encore d'évaluation
- Automatismes Et Nformatique Industrielle: Licence en Genie ElectriqueDocument42 pagesAutomatismes Et Nformatique Industrielle: Licence en Genie ElectriqueHana KhemissiPas encore d'évaluation
- Résumé ArchitectureDocument5 pagesRésumé ArchitectureHana KhemissiPas encore d'évaluation
- Surveillance Robuste Et Modélisation Temps Réel DDocument7 pagesSurveillance Robuste Et Modélisation Temps Réel DHana KhemissiPas encore d'évaluation
- Template Rapport PerfectionnementDocument17 pagesTemplate Rapport PerfectionnementHana KhemissiPas encore d'évaluation
- ProgrammeDocument3 pagesProgrammeHana KhemissiPas encore d'évaluation
- Exam 1Document1 pageExam 1Hana KhemissiPas encore d'évaluation
- Documents Réponse API Et RLIDocument3 pagesDocuments Réponse API Et RLIHana KhemissiPas encore d'évaluation
- Chapitre III RLIDocument9 pagesChapitre III RLIHana KhemissiPas encore d'évaluation
- DC Api Et RliDocument4 pagesDC Api Et RliHana KhemissiPas encore d'évaluation
- TP 1 Initiation Aux Fonctions LogiquesDocument7 pagesTP 1 Initiation Aux Fonctions LogiquesHana KhemissiPas encore d'évaluation
- Examen APIDocument4 pagesExamen APIHana Khemissi100% (1)
- Ch1 Log CombinatoireDocument6 pagesCh1 Log CombinatoireHana KhemissiPas encore d'évaluation
- Ex Auto ElectriqueDocument4 pagesEx Auto ElectriqueHana KhemissiPas encore d'évaluation
- DC AutomatismesDocument4 pagesDC AutomatismesHana KhemissiPas encore d'évaluation
- TP 1Document68 pagesTP 1Hana KhemissiPas encore d'évaluation
- ch3 GrafcetDocument22 pagesch3 GrafcetHana KhemissiPas encore d'évaluation
- Projet SafaaDocument52 pagesProjet SafaaHana KhemissiPas encore d'évaluation
- Chapitre 4Document6 pagesChapitre 4Hana KhemissiPas encore d'évaluation
- Td2 Sys CombDocument1 pageTd2 Sys CombHana KhemissiPas encore d'évaluation
- Ch2 Log SequentielleDocument12 pagesCh2 Log SequentielleHana KhemissiPas encore d'évaluation
- TD1 Systèmes LogiquesDocument2 pagesTD1 Systèmes LogiquesHana KhemissiPas encore d'évaluation
- TD 07 Corrigé - Identification Temporelle Des SLCIDocument5 pagesTD 07 Corrigé - Identification Temporelle Des SLCIHana Khemissi100% (2)
- Td2 Sys CombDocument1 pageTd2 Sys CombHana KhemissiPas encore d'évaluation
- Correction TD1 Systèmes LogiquesDocument3 pagesCorrection TD1 Systèmes LogiquesHana KhemissiPas encore d'évaluation
- TD 07 - Identification Temporelle Des SLCI PDFDocument4 pagesTD 07 - Identification Temporelle Des SLCI PDFHana KhemissiPas encore d'évaluation
- Dossier Machine MARTINEAU SAUVEGARDE 1-06-2012Document58 pagesDossier Machine MARTINEAU SAUVEGARDE 1-06-2012Hana Khemissi100% (1)
- Referrentiel de Certfication Bep Assistant ComptableDocument53 pagesReferrentiel de Certfication Bep Assistant ComptableALIOU SYPas encore d'évaluation
- TD Sur Les Fichiers PDFDocument9 pagesTD Sur Les Fichiers PDFluqmanPas encore d'évaluation
- Experience de Coris Bank en Matiere de Financement de La Transformation Des Produits Agricoles Au Burkina FasoDocument18 pagesExperience de Coris Bank en Matiere de Financement de La Transformation Des Produits Agricoles Au Burkina FasoedwigePas encore d'évaluation
- ConclusionDocument2 pagesConclusionYahya BennPas encore d'évaluation
- Anticiper Les MutationsDocument76 pagesAnticiper Les MutationsdoctoratsrPas encore d'évaluation
- Aubervilliers Un Jeune de 19 Ans Meurt Dans Une Fusillade Sous Les Yeux de Sa Mère - Le ParisienDocument1 pageAubervilliers Un Jeune de 19 Ans Meurt Dans Une Fusillade Sous Les Yeux de Sa Mère - Le ParisienSkb La MachinePas encore d'évaluation
- Désignation Quantité Prix Unitaire Prix TotalDocument1 pageDésignation Quantité Prix Unitaire Prix TotalCheikh Sidya AidaraPas encore d'évaluation
- Comptabilité - Ecritures de RégularisationDocument14 pagesComptabilité - Ecritures de RégularisationMed Reda ElwafiPas encore d'évaluation
- Memotec39 MelangerapideetfloculationDocument2 pagesMemotec39 MelangerapideetfloculationFoulen FouleniPas encore d'évaluation
- Contrôle de Récéption-Par ÉchantillonnageDocument31 pagesContrôle de Récéption-Par ÉchantillonnageANDAHMOUPas encore d'évaluation
- TD4 Macroeconomie S2Document2 pagesTD4 Macroeconomie S2jhonePas encore d'évaluation
- LefbvreDocument1 pageLefbvrejeanmarc gradinPas encore d'évaluation
- Corse Billet 2022Document1 pageCorse Billet 2022NicoPas encore d'évaluation
- Bordereau Vinted 6290734755Document1 pageBordereau Vinted 6290734755SARL LOCADEPSIPas encore d'évaluation
- La Business Intelligence PDFDocument13 pagesLa Business Intelligence PDFSalima BoucennaPas encore d'évaluation
- Ra Ipsen FRDocument31 pagesRa Ipsen FRMaroua Benk99rimaPas encore d'évaluation
- Droit À L'écoute Et À La Représentation Version Améliorée 18.11.2021Document15 pagesDroit À L'écoute Et À La Représentation Version Améliorée 18.11.2021Mystic MindPas encore d'évaluation
- Comptabilite AnalytiqueDocument127 pagesComptabilite AnalytiqueMohammed AaliPas encore d'évaluation
- Micro Économie (Comportement Du Producteur)Document29 pagesMicro Économie (Comportement Du Producteur)belayachisakina08Pas encore d'évaluation
- Producteur Cours N 6Document29 pagesProducteur Cours N 6nadamaoui7Pas encore d'évaluation
- Tableau Excel Pour Calculer Les Heures de TravailDocument224 pagesTableau Excel Pour Calculer Les Heures de TravailDehon Madagascar ToursPas encore d'évaluation
- Processus D'entreposageDocument25 pagesProcessus D'entreposageKhadija ELPas encore d'évaluation
- Oo2 Catalogue Formations Certification V2 0921Document135 pagesOo2 Catalogue Formations Certification V2 0921Sobour AKADIRIPas encore d'évaluation
- Brun Down &upDocument4 pagesBrun Down &upDahmeni HajerPas encore d'évaluation
- La Structure Divisionnelle22Document4 pagesLa Structure Divisionnelle22nourmlkPas encore d'évaluation
- Erp Sage x3 DecouvrirpdfDocument56 pagesErp Sage x3 Decouvrirpdfzakaria abbadiPas encore d'évaluation
- Organisation de Maintenance Aides Pour Le CCF E52Document145 pagesOrganisation de Maintenance Aides Pour Le CCF E52mohammed toumminiPas encore d'évaluation
- Stage de EnapeDocument25 pagesStage de Enapewissembelameiri77Pas encore d'évaluation
- Theories Des Organisations L3 2023Document25 pagesTheories Des Organisations L3 2023talebmelissa102000Pas encore d'évaluation