Vous aimerez peut-être aussi
- TP 1 DoughDocument9 pagesTP 1 Doughleo slegPas encore d'évaluation
- Chapitre 1 Notions de Systemes AsservisDocument9 pagesChapitre 1 Notions de Systemes AsservisMybrahim AitmoussaPas encore d'évaluation
- Chapitre 1 Introduction Aux Systemes AsservisDocument3 pagesChapitre 1 Introduction Aux Systemes AsservisBougatef ZinaPas encore d'évaluation
- Chapitre 1 Introduction Aux Systemes AsservisDocument3 pagesChapitre 1 Introduction Aux Systemes Asservisnadir hammadiPas encore d'évaluation
- Chapitre 1Document6 pagesChapitre 1beghdadi.maamarPas encore d'évaluation
- Chap2 3Document45 pagesChap2 3Aouir RazikaPas encore d'évaluation
- Moteur II BEZIA ZahiraDocument16 pagesMoteur II BEZIA ZahiraAyoub BeziaPas encore d'évaluation
- Chapitre 0 Introduction Aux Systèmes Asservis Linéaires ContinusDocument6 pagesChapitre 0 Introduction Aux Systèmes Asservis Linéaires ContinusBensaada AminePas encore d'évaluation
- Asservessemenet de La Vitesse Lineaire 10 PDFDocument28 pagesAsservessemenet de La Vitesse Lineaire 10 PDFImmamHadramy100% (2)
- Asservissemnt de NiveauDocument27 pagesAsservissemnt de NiveauYassine ChentoufPas encore d'évaluation
- PolycopiéDocument97 pagesPolycopiéRaniaPas encore d'évaluation
- Rgulation Et Contrle SalamDocument92 pagesRgulation Et Contrle SalamDjamalPas encore d'évaluation
- 8 Asservissement LineaireDocument12 pages8 Asservissement LineaireNaas HatemPas encore d'évaluation
- TP0 ArnDocument11 pagesTP0 Arnmarampro2022Pas encore d'évaluation
- Interfacage D Entree CoursDocument4 pagesInterfacage D Entree CoursRachid El OumamiPas encore d'évaluation
- Notions de Systemes Asservis PDFDocument80 pagesNotions de Systemes Asservis PDFSiéJustinDembelePas encore d'évaluation
- Asservissement Régulation FC C1Document23 pagesAsservissement Régulation FC C1Guency Alven Rhocky KOMBILAPas encore d'évaluation
- 1 Systeme Sequentiels Eleve GrafcetDocument8 pages1 Systeme Sequentiels Eleve GrafcetAhmed BelhadjPas encore d'évaluation
- Aut GI LibreDocument80 pagesAut GI LibreAmigoAlgerainoPas encore d'évaluation
- Ch1Notions D'asservissement Et de RégulationDocument6 pagesCh1Notions D'asservissement Et de RégulationMoulod MouloudPas encore d'évaluation
- Chap 1 Echan 16fevDocument12 pagesChap 1 Echan 16fevBrahim BoudyaPas encore d'évaluation
- Slides PlatitudeDocument194 pagesSlides PlatitudeHami DzicPas encore d'évaluation
- Chapitre 1 Intro Sys AssDocument3 pagesChapitre 1 Intro Sys AssGermaine EkoumkangPas encore d'évaluation
- Assirverssement e Position AngulaireDocument29 pagesAssirverssement e Position AngulaireMohammed Akhrif100% (1)
- AutomatesDocument47 pagesAutomatesYoussef ElalaouiPas encore d'évaluation
- Module Asservissement Régulation 120548Document28 pagesModule Asservissement Régulation 120548Sou MyyPas encore d'évaluation
- Cours AutomatismesDocument35 pagesCours AutomatismesSanaa KerroumiPas encore d'évaluation
- Rapport AutomatiqueDocument15 pagesRapport AutomatiqueMariam SajidPas encore d'évaluation
- TP02 ModélisationDocument21 pagesTP02 ModélisationAbde GhezbouryPas encore d'évaluation
- Support Cours2 - AutomatismeDocument78 pagesSupport Cours2 - AutomatismeStéphane akonoPas encore d'évaluation
- Asservissement NumeriqueDocument15 pagesAsservissement NumeriqueRani JusPas encore d'évaluation
- Autom Chap 1Document12 pagesAutom Chap 1tidjani73Pas encore d'évaluation
- 2015 01 08 Cours-Automatique PDFDocument59 pages2015 01 08 Cours-Automatique PDFtagne simo rodriguePas encore d'évaluation
- TP RegulationDocument9 pagesTP RegulationKadour HabitaPas encore d'évaluation
- TP AutomatismeDocument32 pagesTP AutomatismeKawtar FelkiPas encore d'évaluation
- Rapport de La Simulation Du TPDocument11 pagesRapport de La Simulation Du TPmohamed oukiliPas encore d'évaluation
- Chap - 1-Notions Dasservissement Et de RégulationDocument10 pagesChap - 1-Notions Dasservissement Et de RégulationBadreddine BERREHALPas encore d'évaluation
- Chap 1 - Notions de Systèmes AsservisDocument41 pagesChap 1 - Notions de Systèmes AsservisSel MaPas encore d'évaluation
- 3 Le GrafcetDocument13 pages3 Le GrafcetkldmntPas encore d'évaluation
- Systémes Asservis LP 22Document184 pagesSystémes Asservis LP 22Med Amine LabrayakPas encore d'évaluation
- Généralités Sur Les Systèmes AsservisDocument19 pagesGénéralités Sur Les Systèmes AsservisFaten BayouPas encore d'évaluation
- Compte Rendu Des TPsDocument24 pagesCompte Rendu Des TPsBintou TraoréPas encore d'évaluation
- NyquitDocument4 pagesNyquitHamza MaîtrePas encore d'évaluation
- Cours Autom 08Document28 pagesCours Autom 08OsmoPas encore d'évaluation
- TP ObservationDocument7 pagesTP Observationjob100% (2)
- Amphi 2 HDocument21 pagesAmphi 2 HCristian Junior Incacutipa PerezPas encore d'évaluation
- Cours Architecture Des Sys Auto - 2Document97 pagesCours Architecture Des Sys Auto - 2Yahia saadaouiPas encore d'évaluation
- GRAFCETDocument8 pagesGRAFCETNabil Ouled AhmedPas encore d'évaluation
- TP1 Et 2Document16 pagesTP1 Et 2Hanae MenounyPas encore d'évaluation
- ASSERVISSEMENTDocument8 pagesASSERVISSEMENTPape NdiayePas encore d'évaluation
- Auro1a1 TPDocument5 pagesAuro1a1 TPMed Ramy Gaddem EssefiPas encore d'évaluation
- 01suite Du Cours EAGE PDFDocument9 pages01suite Du Cours EAGE PDFSelmane SaoudPas encore d'évaluation
- Chapitre 1Document3 pagesChapitre 1marwan123456789Pas encore d'évaluation
- Systemes AsservisDocument6 pagesSystemes AsservisJalil AkaabounePas encore d'évaluation
- AsservissementDocument61 pagesAsservissementAbdelkarim Ram100% (1)
- SLCI ResumeDocument16 pagesSLCI Resumesoufiane8fkaPas encore d'évaluation
- TP Retour D'étatDocument4 pagesTP Retour D'étatKatherine DukePas encore d'évaluation
- Automatique: Les Grands Articles d'UniversalisD'EverandAutomatique: Les Grands Articles d'UniversalisPas encore d'évaluation
- Maison Intelligente: Conception et réalisation d'une maison intelligenteD'EverandMaison Intelligente: Conception et réalisation d'une maison intelligenteÉvaluation : 4 sur 5 étoiles4/5 (5)
- Chap1-Elt1-Nombres Complexes 2020 01Document9 pagesChap1-Elt1-Nombres Complexes 2020 01Ali MEDJGHOUPas encore d'évaluation
- Chapitre 3 - Stratégies de Contrôle Et de Commande Des Machines Asynchrones - 2018 - 2019 - Commande ScalaireDocument9 pagesChapitre 3 - Stratégies de Contrôle Et de Commande Des Machines Asynchrones - 2018 - 2019 - Commande ScalaireAli MEDJGHOUPas encore d'évaluation
- Ms Aut Benzita+BenhamouDocument91 pagesMs Aut Benzita+BenhamouAli MEDJGHOUPas encore d'évaluation
- Chapitre 2 - Modélisation de La Machine Asynchrone Et Synchrone - 2018 - 2019Document19 pagesChapitre 2 - Modélisation de La Machine Asynchrone Et Synchrone - 2018 - 2019Ali MEDJGHOUPas encore d'évaluation
- TP 02 Simulation Du Réglage de Vitesse Avec Réglage Du Courant D'une MCC À Excitation Séparée - 2018-2019Document6 pagesTP 02 Simulation Du Réglage de Vitesse Avec Réglage Du Courant D'une MCC À Excitation Séparée - 2018-2019Ali MEDJGHOUPas encore d'évaluation
- Cours Appareillages Electriques ch1 Interrupteurs ElectriquesDocument11 pagesCours Appareillages Electriques ch1 Interrupteurs ElectriquesAli MEDJGHOUPas encore d'évaluation
- TP Electrotechnique Fondamentale 1Document44 pagesTP Electrotechnique Fondamentale 1Tarek Bouazza71% (7)
- Cours Appareillages Electriques ch2 Declencheurs ProtectionDocument8 pagesCours Appareillages Electriques ch2 Declencheurs ProtectionAli MEDJGHOUPas encore d'évaluation
- Chapitre 3 - Commande Vectorielle de La Machine Asynchrone - 2018 - 2019 - Commande VectorielleDocument13 pagesChapitre 3 - Commande Vectorielle de La Machine Asynchrone - 2018 - 2019 - Commande VectorielleAli MEDJGHOUPas encore d'évaluation
- Chapitre 1 Modeles de ProcessusDocument18 pagesChapitre 1 Modeles de ProcessusAli MEDJGHOUPas encore d'évaluation
- Travaux Dirigés Régulation Industrielle 18Document15 pagesTravaux Dirigés Régulation Industrielle 18Souhaib Louda100% (1)
- Travaux Dirigés Régulation Industrielle 18Document15 pagesTravaux Dirigés Régulation Industrielle 18Souhaib Louda100% (1)
- Contrôle Industriel Et Régulation Automatique: Brevet de Technicien SupérieurDocument10 pagesContrôle Industriel Et Régulation Automatique: Brevet de Technicien SupérieurAli MEDJGHOUPas encore d'évaluation
- cm2 transfertFichiersPDocument17 pagescm2 transfertFichiersPAli MEDJGHOUPas encore d'évaluation
- Sommaire. Chapitre Identification - Doc Version Du 02-04-2007 À 19 - 58Document24 pagesSommaire. Chapitre Identification - Doc Version Du 02-04-2007 À 19 - 58Ali MEDJGHOUPas encore d'évaluation
- 1 - Définitions généralités Sur La Modã©lisation Et Identification Des Systã Mes électriquesDocument4 pages1 - Définitions généralités Sur La Modã©lisation Et Identification Des Systã Mes électriquesAli MEDJGHOUPas encore d'évaluation
- 1a AutDocument24 pages1a AutELmokhtar HamrouniPas encore d'évaluation
- SampleDocument4 pagesSampleAli MEDJGHOUPas encore d'évaluation
- TP 02 Mesure Triphasé 2020Document7 pagesTP 02 Mesure Triphasé 2020Ali MEDJGHOU100% (1)
- Chapitre 2Document10 pagesChapitre 2Ali MEDJGHOUPas encore d'évaluation
- Contrôle Industriel Et Régulation Automatique: Brevet de Technicien SupérieurDocument10 pagesContrôle Industriel Et Régulation Automatique: Brevet de Technicien SupérieurAli MEDJGHOUPas encore d'évaluation
- Manuel LatexDocument14 pagesManuel LatexjeanbrPas encore d'évaluation
- TD IdentifDocument6 pagesTD Identifali18abid100% (1)
- TP 01 Mesure Monopha2020Document6 pagesTP 01 Mesure Monopha2020Ali MEDJGHOUPas encore d'évaluation
- TP4 Info3 2018Document2 pagesTP4 Info3 2018Ali MEDJGHOUPas encore d'évaluation
- TP2 Info3 2018Document3 pagesTP2 Info3 2018Ali MEDJGHOUPas encore d'évaluation
- TP 03 Le Cycle Dhéstérésis2020Document6 pagesTP 03 Le Cycle Dhéstérésis2020Ali MEDJGHOUPas encore d'évaluation
- Command Es 10Document3 pagesCommand Es 10Ali MEDJGHOUPas encore d'évaluation
- TP5 Info3 2018Document4 pagesTP5 Info3 2018Ali MEDJGHOUPas encore d'évaluation
- TP1 Info3 2018Document4 pagesTP1 Info3 2018Ali MEDJGHOUPas encore d'évaluation
- Histoire Illustrée de L'informatique - Emmanuel Lazard, Pierre Mounier-KuhnDocument280 pagesHistoire Illustrée de L'informatique - Emmanuel Lazard, Pierre Mounier-KuhnOuiza Aghriv100% (3)
- Qu'est-Ce Que La Sécurité SAP ?Document11 pagesQu'est-Ce Que La Sécurité SAP ?Narjiss ElPas encore d'évaluation
- TCP IpDocument20 pagesTCP IpHarrison Dzietham100% (1)
- Formation Oracle Database 12c Administration 193Document3 pagesFormation Oracle Database 12c Administration 193Dida UserPas encore d'évaluation
- Mise en Place Dun Reseau SDNDocument9 pagesMise en Place Dun Reseau SDNAMEL REBBOUCHEPas encore d'évaluation
- Classes Et Abstractions de Données en C++Document2 pagesClasses Et Abstractions de Données en C++jyglywegPas encore d'évaluation
- TP9 Bur2 PDFDocument2 pagesTP9 Bur2 PDFAkram Mohamed BennaimPas encore d'évaluation
- Cours AlgoDocument247 pagesCours AlgoEly BeibouPas encore d'évaluation
- Network LicensesDocument6 pagesNetwork LicensesAhmad CoulibalyPas encore d'évaluation
- Tutorial WPN802Document25 pagesTutorial WPN802Toufik TskPas encore d'évaluation
- Formation SymfonyDocument25 pagesFormation SymfonySafa 'Pas encore d'évaluation
- BVD2398FRDocument4 pagesBVD2398FRsamirPas encore d'évaluation
- Séquence 2Document22 pagesSéquence 2FATYMMA47Pas encore d'évaluation
- s7scl CDocument406 pagess7scl CAbdelkrim LamrousPas encore d'évaluation
- SQL - IBExpert - FirebirdDocument99 pagesSQL - IBExpert - FirebirdinforePas encore d'évaluation
- Cours Sur La Carte MèreDocument120 pagesCours Sur La Carte Mèreimad voukhiar100% (2)
- Mode Emploi BarTenderDocument23 pagesMode Emploi BarTenderMurielle HeuchonPas encore d'évaluation
- TP Instructeur Linux NTDocument59 pagesTP Instructeur Linux NTstrideworldPas encore d'évaluation
- Les Automates Programmable Api-Plc: Technicity - Brussels - Electricité IndustrielleDocument74 pagesLes Automates Programmable Api-Plc: Technicity - Brussels - Electricité IndustrielleMustAfa B.Pas encore d'évaluation
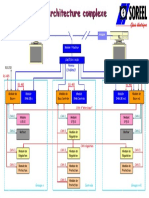
- Architecture Complexe MICS KERYS NEXYSDocument1 pageArchitecture Complexe MICS KERYS NEXYSABDESSPas encore d'évaluation
- CUDA Quick Start GuideDocument19 pagesCUDA Quick Start GuideARSENEPas encore d'évaluation
- SRWE Module 14Document59 pagesSRWE Module 14Ibrahima sory BahPas encore d'évaluation
- Didactitiel F454 Serveur WEBDocument5 pagesDidactitiel F454 Serveur WEBRamazan CALISKANPas encore d'évaluation
- Compilation IntroductionDocument6 pagesCompilation IntroductionStella BenPas encore d'évaluation
- Cours CodesignDocument53 pagesCours CodesignRania ChaouachiPas encore d'évaluation
- TP3 Rli PDFDocument11 pagesTP3 Rli PDFBouhlel ZarroukPas encore d'évaluation
- CompilationDocument79 pagesCompilationDimitri Tibati100% (4)
- CV HICHEM BEN AMMAR PDFDocument3 pagesCV HICHEM BEN AMMAR PDFSalah JallaliPas encore d'évaluation
- Sage Ligne100 SQLDocument140 pagesSage Ligne100 SQLRachid Ait MansourPas encore d'évaluation
- Data CentreDocument21 pagesData CentreKhadidja IZNASNIPas encore d'évaluation