Vous aimerez peut-être aussi
- Guidage Par Roulement Applications)Document15 pagesGuidage Par Roulement Applications)MIMFS92% (26)
- SérieTambour Motoréducteur CorrectionDocument6 pagesSérieTambour Motoréducteur CorrectionHamami Aymen100% (4)
- Examen+Gm2+Reducteur A Engrenage InterieurDocument30 pagesExamen+Gm2+Reducteur A Engrenage InterieurHamza BNPas encore d'évaluation
- TD 19 - Lois Entrée-Sortie en Position Et en VitesseDocument10 pagesTD 19 - Lois Entrée-Sortie en Position Et en Vitessebhs channel100% (2)
- Série D'exercices N°2 - Génie Électrique - Compteur À Base Des Circuits Intégrés - Bac Technique (2015-2016) MR Raouafi AbdallahDocument12 pagesSérie D'exercices N°2 - Génie Électrique - Compteur À Base Des Circuits Intégrés - Bac Technique (2015-2016) MR Raouafi Abdallahfehmi001100% (1)
- Construction Mécanique - TD Spéciaux - MkaDocument13 pagesConstruction Mécanique - TD Spéciaux - MkaJordan Yakam0% (1)
- Exercices Boites de VitessesDocument7 pagesExercices Boites de VitessesAhmed YoussefPas encore d'évaluation
- Exercice MCE5 CorrectionDocument4 pagesExercice MCE5 CorrectionkldmntPas encore d'évaluation
- Intervention D'urgence en Génie CivilDocument4 pagesIntervention D'urgence en Génie CivilCharles OtavianoPas encore d'évaluation
- DR Verin HydrauliqueDocument13 pagesDR Verin HydrauliquefatihamPas encore d'évaluation
- TD FinaleDocument8 pagesTD Finalewass princePas encore d'évaluation
- Sujet 5Document4 pagesSujet 5Amin ChabchoubPas encore d'évaluation
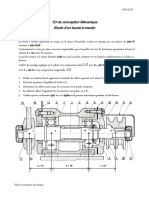
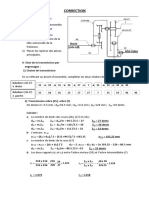
- TD Conception MécaniqueDocument10 pagesTD Conception MécaniqueConception & Fabrication Mécanique100% (1)
- TD2 Transmission Palan MotDocument6 pagesTD2 Transmission Palan MotFerchichi HatemPas encore d'évaluation
- Activités 148-TransmissionDocument4 pagesActivités 148-Transmissionhassen mezniPas encore d'évaluation
- NC091209DP02 - BE2 - Pont À Treillis en NDocument22 pagesNC091209DP02 - BE2 - Pont À Treillis en NBilel ChaabenPas encore d'évaluation
- Proposition de Correction Sujet 2 NdjackDocument11 pagesProposition de Correction Sujet 2 Ndjackalexandrelegrand326Pas encore d'évaluation
- Touret A MeulerDocument2 pagesTouret A MeulerFradj TriplexPas encore d'évaluation
- Sujet 4 2023Document5 pagesSujet 4 2023hamrouniPas encore d'évaluation
- app6-STE-STM-SMB - Destribution de Tubes - RepDocument10 pagesapp6-STE-STM-SMB - Destribution de Tubes - RepTouriya MoukhlesPas encore d'évaluation
- Corr Concours LP 2016-2017Document9 pagesCorr Concours LP 2016-2017Hamza SBPas encore d'évaluation
- RDM 1-2-3-4Document70 pagesRDM 1-2-3-4Thony LikengPas encore d'évaluation
- dsn2 Systeme de Remplissage Correction1Document4 pagesdsn2 Systeme de Remplissage Correction1GuiliassPas encore d'évaluation
- Serie PDFDocument92 pagesSerie PDFAlphonse UrielPas encore d'évaluation
- Cours Engrenages 2019-2020Document34 pagesCours Engrenages 2019-2020Ikram El Jamai100% (1)
- Chap08 MAS PDFDocument4 pagesChap08 MAS PDFCheikh Brahim Elkhadar100% (1)
- TD2 - CM Engrenage Epicycloidale (22 23)Document2 pagesTD2 - CM Engrenage Epicycloidale (22 23)Abderrahmane Ben ErajrajiPas encore d'évaluation
- 43 Exercices EngrenageDocument9 pages43 Exercices EngrenageIlyas MhammediPas encore d'évaluation
- TD 20 Corrigé - Loi Entrée-Sortie À L'aide D'un Produit Scalaire Constant de Deux Vecteurs D'orientationDocument6 pagesTD 20 Corrigé - Loi Entrée-Sortie À L'aide D'un Produit Scalaire Constant de Deux Vecteurs D'orientationMönsîeur Abd NourPas encore d'évaluation
- Présentation Du Moteur Bipolaire:: TP2: Champ Magnétique Dans Un Moteur Électrique BipolaireDocument3 pagesPrésentation Du Moteur Bipolaire:: TP2: Champ Magnétique Dans Un Moteur Électrique Bipolairekima lachgarPas encore d'évaluation
- Examen1 Réseaux Électriques IndustrielsDocument6 pagesExamen1 Réseaux Électriques IndustrielsGACEM KARIMPas encore d'évaluation
- Réducteur À Arbre CreuxDocument10 pagesRéducteur À Arbre CreuxBouker Mohamed100% (1)
- Technique - C P 2019Document11 pagesTechnique - C P 2019yasmine ben slimanePas encore d'évaluation
- Exercice Supp EngrenageDocument2 pagesExercice Supp EngrenageSewa MensahPas encore d'évaluation
- Correction TPDocument3 pagesCorrection TPBouabdellaoui saif ennasrPas encore d'évaluation
- Bac2008 Le RoboCoaster CorDocument9 pagesBac2008 Le RoboCoaster CorXavier-Pierre Rossi100% (1)
- Courroies Solutions1 PDFDocument9 pagesCourroies Solutions1 PDFmessiPas encore d'évaluation
- Cours Engrenages 2019-2020 Bis - CopieDocument42 pagesCours Engrenages 2019-2020 Bis - CopieEl Aziz El Mehdi100% (1)
- Devoir Engrenages eDocument8 pagesDevoir Engrenages esb ali100% (1)
- Cours Conception MEsDocument7 pagesCours Conception MEsOuaïl KBPas encore d'évaluation
- Final TN02 P22 - Sujet - CorrectionDocument15 pagesFinal TN02 P22 - Sujet - CorrectionRémiPas encore d'évaluation
- dcn3 3t2 Dispositif D Entrainement CorrectionDocument4 pagesdcn3 3t2 Dispositif D Entrainement CorrectionGuiliass100% (1)
- 1 QuestionnementDocument5 pages1 Questionnementحمدي العامريPas encore d'évaluation
- Corrige Exo 1Document8 pagesCorrige Exo 1Anonymous 3LCy9HPas encore d'évaluation
- Le Montage D'usinage Corrigé PDFDocument4 pagesLe Montage D'usinage Corrigé PDFD. n50% (2)
- Compte Rendu Du TP 2: Détermination de La Capacité de Sphères Métalliques, de Condensateurs Sphériques Et de La Constante DiélectriqueDocument13 pagesCompte Rendu Du TP 2: Détermination de La Capacité de Sphères Métalliques, de Condensateurs Sphériques Et de La Constante Diélectriquekaoutarmo41Pas encore d'évaluation
- DS Tambour MoteurDocument13 pagesDS Tambour MoteurYann LahellecPas encore d'évaluation
- 1a Corr Tec 2000Document8 pages1a Corr Tec 2000becemPas encore d'évaluation
- Corrigé TD09Document6 pagesCorrigé TD09Tarik HzPas encore d'évaluation
- 2-Dossier Travail DemandDocument11 pages2-Dossier Travail Demandjuliette ravinetPas encore d'évaluation
- Devoir de Controle N3-Transmission de mvt-2011Document3 pagesDevoir de Controle N3-Transmission de mvt-2011GR GARMANI100% (2)
- Machine À Essais MécaniqueDocument12 pagesMachine À Essais MécaniqueDaniel Misseina HoumwaPas encore d'évaluation
- TD Réducteur Inverseur de TreuilDocument2 pagesTD Réducteur Inverseur de Treuilevina nathanPas encore d'évaluation
- TP3 AM IsisDocument3 pagesTP3 AM IsisAnas FarhaouiPas encore d'évaluation
- Sujet 3 PDFDocument5 pagesSujet 3 PDFMohamed Snoussi0% (1)
- TD TE 6.3 Train EpiDocument4 pagesTD TE 6.3 Train EpiKamel BousninaPas encore d'évaluation
- Exercices d'optique et d'électromagnétismeD'EverandExercices d'optique et d'électromagnétismeÉvaluation : 5 sur 5 étoiles5/5 (1)
- Les carnets de construction et vol du cerf-volant: envie de voler plus hautD'EverandLes carnets de construction et vol du cerf-volant: envie de voler plus hautÉvaluation : 5 sur 5 étoiles5/5 (1)
- TH6310Document201 pagesTH6310Zoubida HerrougTvPas encore d'évaluation
- Have We Overestimated Saline Aquifer CO2 Storage CapacitiesDocument13 pagesHave We Overestimated Saline Aquifer CO2 Storage CapacitiesRafael AkhmetzyanovPas encore d'évaluation
- TD 2 Résolution GraphiqueDocument2 pagesTD 2 Résolution GraphiquezinebPas encore d'évaluation
- Societe DolusDocument3 pagesSociete Doluslm10 MedPas encore d'évaluation
- Presentation - Totale - Calcul - de - Chute - de Tension - IFEGDocument40 pagesPresentation - Totale - Calcul - de - Chute - de Tension - IFEGAfef Neji100% (1)
- L'essentiel Pour La PediatrieDocument83 pagesL'essentiel Pour La Pediatrien7gy6wkv9rPas encore d'évaluation
- T - 22 - Géométrie Vectorielle - BisDocument10 pagesT - 22 - Géométrie Vectorielle - BisidPas encore d'évaluation
- DM MDS2 - BAIBA RahelDocument4 pagesDM MDS2 - BAIBA RahelRahel BAPas encore d'évaluation
- Introduction GeneralDocument5 pagesIntroduction GeneralJaweb WebPas encore d'évaluation
- Brochure Hiver 2009Document52 pagesBrochure Hiver 2009bogdan@sepoarta.roPas encore d'évaluation
- Bac S 2012 Prob AbilitesDocument163 pagesBac S 2012 Prob AbilitesDohan Saadane100% (1)
- Pfe Stage Anass Benaziz Master INDUSAHADocument74 pagesPfe Stage Anass Benaziz Master INDUSAHASaadia JamalPas encore d'évaluation
- Chapitre 3Document36 pagesChapitre 3Othmane MoubarikPas encore d'évaluation
- OEuvres Completes Du Bienheureux A.-M. de Liguori (Tome 6) 000001005Document537 pagesOEuvres Completes Du Bienheureux A.-M. de Liguori (Tome 6) 000001005LISBONNEPas encore d'évaluation
- Bac S 2011 - Les Sujets Probables en MathématiquesDocument4 pagesBac S 2011 - Les Sujets Probables en MathématiquesMehdi ChamekhPas encore d'évaluation
- L2-Formation Et Évolution Des Bassins SédimentairesDocument2 pagesL2-Formation Et Évolution Des Bassins Sédimentaireshajar chellahPas encore d'évaluation
- Cours Bases Dirrigation COMPLETDocument109 pagesCours Bases Dirrigation COMPLETHouyem Guebli100% (2)
- Températures de CuissonDocument3 pagesTempératures de CuissonHassen HoussiPas encore d'évaluation
- Représentation Du Schéma D'assainissement U1Document3 pagesReprésentation Du Schéma D'assainissement U1Isaac KandaPas encore d'évaluation
- Fonction Ordonnancement - 2014 - EtudDocument26 pagesFonction Ordonnancement - 2014 - Etudnguele lionnelPas encore d'évaluation
- Une Lettre AmicaleDocument1 pageUne Lettre AmicaleMiguel Nuñez Morales0% (1)
- FinallDocument56 pagesFinallRaphaëlPas encore d'évaluation
- Examen Developpement Mobile.4IIR - BOUSMAHDocument8 pagesExamen Developpement Mobile.4IIR - BOUSMAHberylmerikhPas encore d'évaluation
- La Vie Au MexiqueDocument7 pagesLa Vie Au Mexiquerodrigoguadiana790Pas encore d'évaluation
- Cours Math - Dérivabilité - Bac Math MR Dhaouadi Nejib WWW - Sigmaths.co - CCDocument10 pagesCours Math - Dérivabilité - Bac Math MR Dhaouadi Nejib WWW - Sigmaths.co - CCRochdi Bouzaien100% (1)
- NOMBREENTIERDocument1 pageNOMBREENTIERIMANPas encore d'évaluation
- Chapitre 5 PH Des Solutions AqueusesDocument16 pagesChapitre 5 PH Des Solutions AqueusesSyryne DridiPas encore d'évaluation
- 158 - 170 DécantationDocument14 pages158 - 170 DécantationZe Lotfi100% (2)