Vous aimerez peut-être aussi
- Photovoltaïque | pas à pas: Le guide pratique pour débutants pour la conception d'une installation PVD'EverandPhotovoltaïque | pas à pas: Le guide pratique pour débutants pour la conception d'une installation PVPas encore d'évaluation
- Exposition Pratique PhotoDocument289 pagesExposition Pratique PhotoMontasser Taktak100% (2)
- Exercices d'optique et d'électromagnétismeD'EverandExercices d'optique et d'électromagnétismeÉvaluation : 5 sur 5 étoiles5/5 (1)
- A propos du Digital!: Le digital pour tous! Le numérique en questions/réponses pour le modélisme ferroviaireD'EverandA propos du Digital!: Le digital pour tous! Le numérique en questions/réponses pour le modélisme ferroviaireÉvaluation : 3.5 sur 5 étoiles3.5/5 (3)
- Reseaux Electriques-ExtraitDocument26 pagesReseaux Electriques-ExtraitJamal Mahmoud100% (1)
- Cours Protection Des Réseau Chapitre I II IIIDocument40 pagesCours Protection Des Réseau Chapitre I II IIIAsma Lakhdar100% (3)
- Modélisation Et Commande Les Convertisseurs DC-DC Et DC-AC2Document26 pagesModélisation Et Commande Les Convertisseurs DC-DC Et DC-AC2Ayache IsmaëlPas encore d'évaluation
- Avencall - Installation de XiVO Depuis Une Source ISO Ed2Document31 pagesAvencall - Installation de XiVO Depuis Une Source ISO Ed2mo252100% (1)
- Bilan Des PuissancesDocument9 pagesBilan Des Puissanceswoukouo100% (1)
- TD RS232 CorrDocument6 pagesTD RS232 CorrMarwen LasmerPas encore d'évaluation
- Théorie et conception des filtres analogiques, 2e édition: Avec MatlabD'EverandThéorie et conception des filtres analogiques, 2e édition: Avec MatlabPas encore d'évaluation
- 1 Production D'electricitéDocument12 pages1 Production D'electricitéIkram Ikram100% (1)
- 1ére Devoir Bac 2019 SM HikmaDocument4 pages1ére Devoir Bac 2019 SM HikmaHAMADA1972100% (1)
- Realisation Onduleur 5 Niveau Momtez PDFDocument11 pagesRealisation Onduleur 5 Niveau Momtez PDFslimabid100% (2)
- Exercices TransistorDocument10 pagesExercices TransistorMahfoudh Ould AbderrahmanePas encore d'évaluation
- Le Poste de DistributionDocument10 pagesLe Poste de DistributionAmm ÃrPas encore d'évaluation
- Calcul Load FlowDocument29 pagesCalcul Load FlowyaojeanotherPas encore d'évaluation
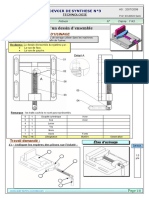
- DevoirDeSyntheseN3 1AS 2008 Etau D'usinage Mixeur 2Document6 pagesDevoirDeSyntheseN3 1AS 2008 Etau D'usinage Mixeur 2Rabia ZaiedPas encore d'évaluation
- ch1 - METHODE D'ECOULEMENT DE PUISSANCE DANS LES RESEAUX DE DISTRIBUTIONDocument28 pagesch1 - METHODE D'ECOULEMENT DE PUISSANCE DANS LES RESEAUX DE DISTRIBUTIONKANZA010160% (10)
- Etude D'un Système PhotovoltaiqueDocument5 pagesEtude D'un Système PhotovoltaiqueBen Fah100% (1)
- Chapitre I Cours de Transport Et Distribution de L'energie ElectriquepdfDocument22 pagesChapitre I Cours de Transport Et Distribution de L'energie ElectriquepdfTharcisse KANAPas encore d'évaluation
- Article Photovoltaique Revue 3EIDocument7 pagesArticle Photovoltaique Revue 3EIjmroussel100% (1)
- Structures de ConversionsDocument15 pagesStructures de ConversionsMehdi OuadjouPas encore d'évaluation
- FlittiDocument6 pagesFlittiBad BoyPas encore d'évaluation
- Articlemeflah 1Document12 pagesArticlemeflah 1Amine AghbariPas encore d'évaluation
- 16293Document10 pages16293mabrouk1998Pas encore d'évaluation
- Onduleurs HFDocument12 pagesOnduleurs HFBruno LambertPas encore d'évaluation
- Art12-4 2Document9 pagesArt12-4 2Amina LaarabiPas encore d'évaluation
- 9727 23676 1 PBDocument9 pages9727 23676 1 PBHassan RafiaPas encore d'évaluation
- Art12-4 2Document9 pagesArt12-4 2Francis Logamou AdoumPas encore d'évaluation
- Chapitre I 22Document17 pagesChapitre I 22Alpha DialloPas encore d'évaluation
- Rapport 3 PDFDocument33 pagesRapport 3 PDFOmar MejriPas encore d'évaluation
- 121Document6 pages121sw01.developerPas encore d'évaluation
- E38 PDFDocument6 pagesE38 PDFHicham OmrPas encore d'évaluation
- OnduleurquattroDocument10 pagesOnduleurquattroAPLOGANPas encore d'évaluation
- Baba BoyDocument14 pagesBaba BoyAbdelmoumen SamyPas encore d'évaluation
- Article CEM2014 CJULLIENDocument7 pagesArticle CEM2014 CJULLIENSARAPas encore d'évaluation
- JCGE08 Mustapha HATTIDocument6 pagesJCGE08 Mustapha HATTISabir AbdoPas encore d'évaluation
- Ir NTANGA 2Document42 pagesIr NTANGA 2cedrickPas encore d'évaluation
- 0 PR SenDocument5 pages0 PR Sencharletb toubiaPas encore d'évaluation
- Semi-Conducteur 2 PDFDocument8 pagesSemi-Conducteur 2 PDFSousou Foufou100% (1)
- Conduite Des Réseaux ÉlectriquesDocument28 pagesConduite Des Réseaux ÉlectriquesBa Bi91Pas encore d'évaluation
- Boitier Maussion MPPT VfinaleDocument8 pagesBoitier Maussion MPPT VfinaleHichem HamdiPas encore d'évaluation
- IDRISTP (1) RemovedDocument12 pagesIDRISTP (1) RemovedMina ManinaPas encore d'évaluation
- ConvertisseurDocument7 pagesConvertisseurmezyan reggaiPas encore d'évaluation
- FactsDocument10 pagesFactsMessaoud Djamal LaidiPas encore d'évaluation
- Mémoire Finale (Chapitre2)Document28 pagesMémoire Finale (Chapitre2)Âÿâčhê ÎsmâïlPas encore d'évaluation
- Id 003Document6 pagesId 003AliXmetecPas encore d'évaluation
- Elec de P4 LightDocument44 pagesElec de P4 Lightarbaoui11Pas encore d'évaluation
- TD ConvertisseurDocument5 pagesTD Convertisseurhoussam haddaniPas encore d'évaluation
- Contrôle de La Puissance Active Et Réactive InstantanéeDocument6 pagesContrôle de La Puissance Active Et Réactive InstantanéeAhmed BennaouiPas encore d'évaluation
- 7-Chapitre IVDocument12 pages7-Chapitre IVissPas encore d'évaluation
- Paper Cee 043Document6 pagesPaper Cee 043kouacemi yahiaPas encore d'évaluation
- Chapitre 01 Generalites Sur La Stabilite Et Dynamique Des Reseaux Electriques 2021 FinalDocument17 pagesChapitre 01 Generalites Sur La Stabilite Et Dynamique Des Reseaux Electriques 2021 FinalThomas MOREPas encore d'évaluation
- S HADDAD Jijel - UnivDocument6 pagesS HADDAD Jijel - UnivTarek BouallegPas encore d'évaluation
- Article SGE 2016Document7 pagesArticle SGE 2016Nabil TAIBPas encore d'évaluation
- Chapitre II Dimensionnement Et Conceptio 2Document29 pagesChapitre II Dimensionnement Et Conceptio 2YahyaPas encore d'évaluation
- Majister.2005 KH - Imarazene90 PDFDocument111 pagesMajister.2005 KH - Imarazene90 PDFAsm MaPas encore d'évaluation
- Alimentation Par Biberonnage Solaire PhotovoltaiquDocument13 pagesAlimentation Par Biberonnage Solaire PhotovoltaiquHajar TaiboubiPas encore d'évaluation
- 2 FRDocument22 pages2 FRLylia ZennafPas encore d'évaluation
- Article 20 ICRE2 Bis 1Document7 pagesArticle 20 ICRE2 Bis 1Morel SangangPas encore d'évaluation
- Chapitre II Dimensionnement Et ConceptioDocument27 pagesChapitre II Dimensionnement Et ConceptioSiham AssouPas encore d'évaluation
- SSSCDocument5 pagesSSSCbassel boudoukhaPas encore d'évaluation
- Cours D'Electronique de Puissance: Universite Hassan Ii de CasablancaDocument47 pagesCours D'Electronique de Puissance: Universite Hassan Ii de CasablancaYasser LafarjiPas encore d'évaluation
- Presentation Asi Electronique PuissanceDocument28 pagesPresentation Asi Electronique Puissanceboussaoud.oualidPas encore d'évaluation
- Examen Elet 1 2018 2019Document2 pagesExamen Elet 1 2018 2019ssdsqdPas encore d'évaluation
- Association Machines-Convertisseurs - Partie3Document35 pagesAssociation Machines-Convertisseurs - Partie3abdelali chakirPas encore d'évaluation
- Manuel Utilisateur TDA30Document210 pagesManuel Utilisateur TDA30Guy ZebazePas encore d'évaluation
- GEL-19962 - A1996 - Leslie Rusch - 1 - MiniRepDocument4 pagesGEL-19962 - A1996 - Leslie Rusch - 1 - MiniRepMaxence KouessiPas encore d'évaluation
- GSM Gprs Edge LteDocument21 pagesGSM Gprs Edge Lteنزار فرجاني100% (1)
- Mega-Bloks Dragons 9882 Fire-MountainDocument8 pagesMega-Bloks Dragons 9882 Fire-MountainGiorGiorGioPas encore d'évaluation
- Capteur PlanDocument2 pagesCapteur PlanMohamed FLPas encore d'évaluation
- TP Electronique 0101Document20 pagesTP Electronique 0101Wãssîm Ãzzåoùî100% (2)
- Buzzer ModDocument8 pagesBuzzer ModJean Claude KonanPas encore d'évaluation
- Lorenzo Canova - Generation and Shaping of Ultra-Short, Ultra-High Contrast Pulses For High Repetition Rate Relativistic OpticsDocument193 pagesLorenzo Canova - Generation and Shaping of Ultra-Short, Ultra-High Contrast Pulses For High Repetition Rate Relativistic OpticsPocxaPas encore d'évaluation
- FP SR16201H FrançaisDocument2 pagesFP SR16201H FrançaisCLAVOTPas encore d'évaluation
- Université Abdelmalek Essaadi Faculté Polydisciplinaire de Larache Travaux Pratiques Electronique de BaseDocument10 pagesUniversité Abdelmalek Essaadi Faculté Polydisciplinaire de Larache Travaux Pratiques Electronique de BaseKhaoula ChetouanPas encore d'évaluation
- Courbes IDFDocument18 pagesCourbes IDFsorelle NGUENGNE50% (2)
- Ondes Et Signaux - Chapitre 6-Filtrage LineaireDocument82 pagesOndes Et Signaux - Chapitre 6-Filtrage LineaireyukihirasomayvesPas encore d'évaluation
- Peugeot Expert (Jan 2005 Dec 2005) Notice Mode Emploi Manuel Guide PDFDocument113 pagesPeugeot Expert (Jan 2005 Dec 2005) Notice Mode Emploi Manuel Guide PDFCLAKOS50% (2)
- MG33BF04 PDFDocument204 pagesMG33BF04 PDFSamuel MbodoPas encore d'évaluation
- TestDocument28 pagesTestYassine AigotiPas encore d'évaluation
- Identification Et Contrôle de La Machine À Courant Continu Par La Dspace 1103Document71 pagesIdentification Et Contrôle de La Machine À Courant Continu Par La Dspace 1103Bakrim OumaimaPas encore d'évaluation
- Rappel Plaque SignalétiqueDocument2 pagesRappel Plaque Signalétiquetoufik1986Pas encore d'évaluation
- Notice PASM24WDocument4 pagesNotice PASM24WmourissePas encore d'évaluation
- TSFP05Document28 pagesTSFP05tp77870Pas encore d'évaluation
- Varlogic CempensationDocument32 pagesVarlogic Cempensationnopola4610Pas encore d'évaluation
- AC Interface Controle Courant PorteurDocument17 pagesAC Interface Controle Courant PorteurfakeeeeeeePas encore d'évaluation
- Active Filters TPDocument8 pagesActive Filters TPStro VertPas encore d'évaluation