Vous aimerez peut-être aussi
- TD Serie2Document3 pagesTD Serie2Nowe Ahmade100% (1)
- Cours Elasticite GMP4Document129 pagesCours Elasticite GMP4nguele lionnelPas encore d'évaluation
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- 8 - EngrenageyhkDocument62 pages8 - EngrenageyhkFédyHamdiPas encore d'évaluation
- Fiabilité, maintenance prédictive et vibration des machinesD'EverandFiabilité, maintenance prédictive et vibration des machinesPas encore d'évaluation
- Chapitre V Analyse Dimensionnelle PDFDocument5 pagesChapitre V Analyse Dimensionnelle PDFFatma Zohra OUIRPas encore d'évaluation
- MN I Ver01 Part01Document30 pagesMN I Ver01 Part01Nathaniel Nerquaye-tetteh100% (1)
- FreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesD'EverandFreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesPas encore d'évaluation
- DS2 1Document5 pagesDS2 1Braxt MwIra GibecièrePas encore d'évaluation
- Superalliage: Résistant à la chaleur de 2700 degrés Fahrenheit générée par les moteurs à turbine pour être plus chaud, plus rapide et plus efficaceD'EverandSuperalliage: Résistant à la chaleur de 2700 degrés Fahrenheit générée par les moteurs à turbine pour être plus chaud, plus rapide et plus efficacePas encore d'évaluation
- Chapitre 4 EngrenagesDroitsDocument20 pagesChapitre 4 EngrenagesDroitsKaram QaoubPas encore d'évaluation
- RMChap5 (Cisaillement) PDFDocument33 pagesRMChap5 (Cisaillement) PDFsoufyanPas encore d'évaluation
- Matrice D'inertieDocument4 pagesMatrice D'inertieJean AbelaPas encore d'évaluation
- TDs Calcul Structures - Corrigé 2212 - 231222 - 143922Document7 pagesTDs Calcul Structures - Corrigé 2212 - 231222 - 143922anasidy4Pas encore d'évaluation
- Équilibrage DynamiqueDocument1 pageÉquilibrage Dynamiqueabibeh1001Pas encore d'évaluation
- Courbe de BézierDocument39 pagesCourbe de BézierYosra JbeliPas encore d'évaluation
- ENSP - Niveau2 - PHY228 - STATIQUE - Module 2 - LES TORSEURS UTILISES EN MECANIQUE - Cours - V22032020Document8 pagesENSP - Niveau2 - PHY228 - STATIQUE - Module 2 - LES TORSEURS UTILISES EN MECANIQUE - Cours - V22032020NANA EmmanuelPas encore d'évaluation
- TDMMC Novembre 2010Document19 pagesTDMMC Novembre 2010Taysir AbidiPas encore d'évaluation
- Exercices de MMCDocument15 pagesExercices de MMCWael BadriPas encore d'évaluation
- Chap 3Document37 pagesChap 3Yassine TouhamiPas encore d'évaluation
- Chapitre III - Mobilité Et Hyperstatisme Partie 3Document3 pagesChapitre III - Mobilité Et Hyperstatisme Partie 3Lamia OhrchePas encore d'évaluation
- TD ModesDocument1 pageTD ModesMourad TajPas encore d'évaluation
- DS TRS 2020 2021 CorrectionDocument4 pagesDS TRS 2020 2021 CorrectionHB RIMPas encore d'évaluation
- TDsDocument28 pagesTDsDécouvrir votre mondePas encore d'évaluation
- 1-Liaisons en Parallèles: X Z Z XDocument12 pages1-Liaisons en Parallèles: X Z Z XLarbi Elbakkali100% (1)
- Examen MMC Oct 2014 Sujet Et CorrectionDocument3 pagesExamen MMC Oct 2014 Sujet Et CorrectionHoussem HassanetPas encore d'évaluation
- GM DS4-2015 CorrigeDocument5 pagesGM DS4-2015 Corrigeahmed TVPas encore d'évaluation
- MMC PDFDocument74 pagesMMC PDFDamien MirandaPas encore d'évaluation
- MEF Methode Des Elements Finis PolycopieDocument32 pagesMEF Methode Des Elements Finis PolycopieMansour LassouedPas encore d'évaluation
- (RDM) (CO) Resistance Des Materiaux PDFDocument30 pages(RDM) (CO) Resistance Des Materiaux PDFZoro LeadPas encore d'évaluation
- TP CAO 3D Pompe A MainDocument14 pagesTP CAO 3D Pompe A MainBouraoui Ben AyedPas encore d'évaluation
- 16 EX9 PerceuseDocument1 page16 EX9 PerceuseChokri Atef100% (1)
- Cinématique D'une Pompe HydrauliqueDocument3 pagesCinématique D'une Pompe HydrauliqueAnonymous 3rTgmmuYJYPas encore d'évaluation
- Chapitre 6 - La TorsionDocument19 pagesChapitre 6 - La TorsionBadr-eddineBounouPas encore d'évaluation
- TD132 CorrectionDocument6 pagesTD132 CorrectionTalel MissaouiPas encore d'évaluation
- Chaînes de Solides Et Hyperstatisme PDFDocument13 pagesChaînes de Solides Et Hyperstatisme PDFmmPas encore d'évaluation
- Poly MDM 3emeDocument34 pagesPoly MDM 3emeNowe AhmadePas encore d'évaluation
- Corrige CC1 Calcul Des Structures 2017 2018Document6 pagesCorrige CC1 Calcul Des Structures 2017 2018Aya ChikerPas encore d'évaluation
- Cours Poulies CourroiesDocument7 pagesCours Poulies CourroiesABDELHAKPas encore d'évaluation
- Modelisation Des Liaisons MecaniquesDocument5 pagesModelisation Des Liaisons MecaniquesayatextPas encore d'évaluation
- Sommaire: Rapport de Stage Effectue Au Lycee Technique de Nylon Douala (2022-2023)Document21 pagesSommaire: Rapport de Stage Effectue Au Lycee Technique de Nylon Douala (2022-2023)Pënsēür Bïô R-bPas encore d'évaluation
- Cahier Dexercices (2019)Document31 pagesCahier Dexercices (2019)lounesPas encore d'évaluation
- Chapitre 5 Caracteristiques Inertie Des SolidesDocument21 pagesChapitre 5 Caracteristiques Inertie Des Solidesjoe100% (1)
- DynamiqueDocument23 pagesDynamiqueSaidPas encore d'évaluation
- TD DistributionsDocument2 pagesTD DistributionsOussama EssaïfiPas encore d'évaluation
- 3 - Com - LOREXP - 2021 - A1082 - KAMGA - Conception Et Réalisation D'une Étuveuse À Vapeur Et D'une Décortiqueuse de Noix de Cajou.Document9 pages3 - Com - LOREXP - 2021 - A1082 - KAMGA - Conception Et Réalisation D'une Étuveuse À Vapeur Et D'une Décortiqueuse de Noix de Cajou.Dimitri Valdes Tchuindjang100% (1)
- Auto PB-F1+Document7 pagesAuto PB-F1+Dayang DayangPas encore d'évaluation
- RESISTANCE DES MATERIAUX N1 ExeDocument3 pagesRESISTANCE DES MATERIAUX N1 ExeghfgdhhngfjfghfnggPas encore d'évaluation
- Tp4 Calcul Raideur Rdm6 Optimisation de Structure Logiciel RDM Le ManDocument5 pagesTp4 Calcul Raideur Rdm6 Optimisation de Structure Logiciel RDM Le ManAmine RdPas encore d'évaluation
- Cours 03 - Loi Entree SortieDocument10 pagesCours 03 - Loi Entree SortieEdgar Étape100% (1)
- La Methode Des Elements FinisDocument59 pagesLa Methode Des Elements FinisNassimZerroukiPas encore d'évaluation
- TD - 1 MMC m1 - CM 20 21Document1 pageTD - 1 MMC m1 - CM 20 21Farouk GhanemPas encore d'évaluation
- ASM Chap5 Guidage Rotation Calcul Roulements V01 Etudiants.Document33 pagesASM Chap5 Guidage Rotation Calcul Roulements V01 Etudiants.achraf mhimdiPas encore d'évaluation
- Cours RDM Ens CachanDocument60 pagesCours RDM Ens Cachanlekouf4350% (4)
- EXEMPLE CORRIGES Polygones Des Accélérations 2020Document22 pagesEXEMPLE CORRIGES Polygones Des Accélérations 2020JJ MosesPas encore d'évaluation
- Statique GraphiqueDocument3 pagesStatique Graphiquesallsmart100% (1)
- RobInd TD1Document2 pagesRobInd TD1mezianePas encore d'évaluation
- CH05-Ponts en Acier 2014 Corrigé PDFDocument94 pagesCH05-Ponts en Acier 2014 Corrigé PDFEtienne LechasseurPas encore d'évaluation
- Note2 - Contraintes - Fluides RéelsDocument18 pagesNote2 - Contraintes - Fluides RéelsZahirPas encore d'évaluation
- CSTB - Methode de Calcul Chevilles ETAGDocument22 pagesCSTB - Methode de Calcul Chevilles ETAGnbjshaaPas encore d'évaluation
- CPT - 3488 VecDocument56 pagesCPT - 3488 VeclecaudeyPas encore d'évaluation
- Cours - CM - 2 - Chapitre - 2 - Bases de Dimensionnement Des Structures en Acier - 11 - 12Document127 pagesCours - CM - 2 - Chapitre - 2 - Bases de Dimensionnement Des Structures en Acier - 11 - 12molk kallel100% (1)
- Chapitre4 PDFDocument31 pagesChapitre4 PDFMohammed NaciriPas encore d'évaluation
- Poutre Principale Mixte Simplement AppuyéeDocument17 pagesPoutre Principale Mixte Simplement AppuyéeAmel FahemPas encore d'évaluation
- Exercice N 5 Calcul Des Assemblage Chapitre 11 1635772855Document6 pagesExercice N 5 Calcul Des Assemblage Chapitre 11 1635772855bouysfiPas encore d'évaluation
- AIDOUDI RayeneDocument71 pagesAIDOUDI RayeneJbeli GhofranePas encore d'évaluation
- Cours de Mecanique Des Sols Et ExercisesDocument285 pagesCours de Mecanique Des Sols Et Exerciseslimmoud100% (1)
- Cours de Mécanique Des Sols Tome II Fondations Et Ouvrages en TerreDocument106 pagesCours de Mécanique Des Sols Tome II Fondations Et Ouvrages en TerreADJOUT100% (1)
- Résistance Des Matériaux - IntroductionDocument6 pagesRésistance Des Matériaux - IntroductionDaniel TOGUYALLAH NDIGUENYAMPas encore d'évaluation
- TP Mds Ensa TetouanDocument8 pagesTP Mds Ensa TetouanAyoub YamaniPas encore d'évaluation
- TDdds2A TDDocument12 pagesTDdds2A TDLynVanderson50% (4)
- Flexion Transversale-2017Document78 pagesFlexion Transversale-2017Andreas RagusPas encore d'évaluation
- Code - Aster: Calcul Des Caractéristiques D'une Poutre de Section Transversale QuelconqueDocument35 pagesCode - Aster: Calcul Des Caractéristiques D'une Poutre de Section Transversale QuelconqueSàLàh RhànnouriPas encore d'évaluation
- CH 1 RDMDocument12 pagesCH 1 RDMDestorelle NguedjioPas encore d'évaluation
- Mécanique Des Sols 2 COUR N°05Document3 pagesMécanique Des Sols 2 COUR N°05mahedi abedPas encore d'évaluation
- Note de Calcul Bloc A PDFDocument26 pagesNote de Calcul Bloc A PDFAnis AmaniPas encore d'évaluation
- Receuil Des Exercices MDS Kissi PDFDocument8 pagesReceuil Des Exercices MDS Kissi PDFassia maziPas encore d'évaluation
- TP 2 Cisaillement À La BoiteDocument4 pagesTP 2 Cisaillement À La BoiteBob IsmailPas encore d'évaluation
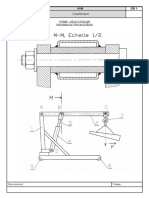
- Eval 2 Cisaillement Chevre Grue D'atelierDocument3 pagesEval 2 Cisaillement Chevre Grue D'atelierbenfatah50% (2)
- DTR c245Document62 pagesDTR c245Nacer Izri89% (9)
- Extrait 42219210 PDFDocument97 pagesExtrait 42219210 PDFAnonymous M9Apv76NIPas encore d'évaluation
- Étude D'un Bâtiment À Usage D'habitation (R+7) Contreventement Mixte (Portique + Voile)Document98 pagesÉtude D'un Bâtiment À Usage D'habitation (R+7) Contreventement Mixte (Portique + Voile)Wišşãl Benz100% (1)
- Cours Destiné Aux Étudiants de Deuxième Bachelier en Génie Industriel 2020-2021Document303 pagesCours Destiné Aux Étudiants de Deuxième Bachelier en Génie Industriel 2020-2021Glory MukalengaPas encore d'évaluation
- Corrige 4Document4 pagesCorrige 4Ibtissam RouichiPas encore d'évaluation
- Exercice - RDM - Cisaillement - Clavette Motorducteur - EnoncDocument4 pagesExercice - RDM - Cisaillement - Clavette Motorducteur - Enoncomar-benka-3821Pas encore d'évaluation
- Assemblages BoulonnesDocument37 pagesAssemblages BoulonnesMohamud LhafPas encore d'évaluation
- Cours - CM - 1 - Chapitre - 5 - Partie - 1 - Assemblages Boulonnés en CMDocument47 pagesCours - CM - 1 - Chapitre - 5 - Partie - 1 - Assemblages Boulonnés en CMMezni100% (1)
- Secrets ancestraux d'un maître guérisseur: Un sceptique occidental, un maître oriental et les plus grands secrets de la vieD'EverandSecrets ancestraux d'un maître guérisseur: Un sceptique occidental, un maître oriental et les plus grands secrets de la vieÉvaluation : 5 sur 5 étoiles5/5 (2)
- Améliorer votre mémoire: Un Guide pour l'augmentation de la puissance du cerveau, utilisant des techniques et méthodesD'EverandAméliorer votre mémoire: Un Guide pour l'augmentation de la puissance du cerveau, utilisant des techniques et méthodesÉvaluation : 5 sur 5 étoiles5/5 (2)
- L'Art de la guerre: Traité de stratégie en 13 chapitres (texte intégral)D'EverandL'Art de la guerre: Traité de stratégie en 13 chapitres (texte intégral)Évaluation : 4 sur 5 étoiles4/5 (3032)
- Le profilage au service du football: Démarche scientifique pour un recrutement et entraînements optimisésD'EverandLe profilage au service du football: Démarche scientifique pour un recrutement et entraînements optimisésPas encore d'évaluation
- Électrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsD'EverandÉlectrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Manuel de fabrication du savon: Je fabrique mes savons facilementD'EverandManuel de fabrication du savon: Je fabrique mes savons facilementÉvaluation : 5 sur 5 étoiles5/5 (4)
- 160 ressources pour se lancer dans la vidéo quand on n’y connait rienD'Everand160 ressources pour se lancer dans la vidéo quand on n’y connait rienPas encore d'évaluation
- Approvisionnement et traitement de l’eau: Les Grands Articles d'UniversalisD'EverandApprovisionnement et traitement de l’eau: Les Grands Articles d'UniversalisPas encore d'évaluation
- Anatomie & 100 étirements essentiels: Techniques, Bénéfices attendus, Précautions à prendre, Conseils, Tableaux de séries, DouleursD'EverandAnatomie & 100 étirements essentiels: Techniques, Bénéfices attendus, Précautions à prendre, Conseils, Tableaux de séries, DouleursPas encore d'évaluation
- 20 Véritables remèdes de nos grands-mères pour maigrir vite et enfin perdre du poidsD'Everand20 Véritables remèdes de nos grands-mères pour maigrir vite et enfin perdre du poidsÉvaluation : 5 sur 5 étoiles5/5 (1)
- La vie des abeilles: Prix Nobel de littératureD'EverandLa vie des abeilles: Prix Nobel de littératureÉvaluation : 4 sur 5 étoiles4/5 (41)
- Transformez votre vie: Utilisez le pouvoir créateur qui est en vous pour construire votre vie à l'image de ce que vous voulez qu'elle soitD'EverandTransformez votre vie: Utilisez le pouvoir créateur qui est en vous pour construire votre vie à l'image de ce que vous voulez qu'elle soitÉvaluation : 4 sur 5 étoiles4/5 (14)
- Un régime quantiqueD'EverandUn régime quantiqueÉvaluation : 5 sur 5 étoiles5/5 (1)
- Harmonisation Energétique des Lieux: Habitat et haut-lieux sacrés 2020D'EverandHarmonisation Energétique des Lieux: Habitat et haut-lieux sacrés 2020Évaluation : 2.5 sur 5 étoiles2.5/5 (3)
- Harmonisation Energétique des Personnes: Manuel de Curothérapie 2020D'EverandHarmonisation Energétique des Personnes: Manuel de Curothérapie 2020Évaluation : 4 sur 5 étoiles4/5 (8)
- Cahier de jeux de stimulation cognitive: Sujets Alzheimer, désorientés, démences, amnésiesD'EverandCahier de jeux de stimulation cognitive: Sujets Alzheimer, désorientés, démences, amnésiesPas encore d'évaluation
- Cancer - Leucémie: Et autres maladies apparemment incurables, mais guérissables avec des moyens naturelsD'EverandCancer - Leucémie: Et autres maladies apparemment incurables, mais guérissables avec des moyens naturelsPas encore d'évaluation
- Enseigner une Langue Etrangère Par l’Apprentissage HybrideD'EverandEnseigner une Langue Etrangère Par l’Apprentissage HybridePas encore d'évaluation
- Physique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresD'EverandPhysique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresÉvaluation : 5 sur 5 étoiles5/5 (2)
- Conception & Modélisation CAO: Le guide ultime du débutantD'EverandConception & Modélisation CAO: Le guide ultime du débutantPas encore d'évaluation
- Le B.A.-Ba de la communication: Comment convaincre, informer, séduire ?D'EverandLe B.A.-Ba de la communication: Comment convaincre, informer, séduire ?Évaluation : 3 sur 5 étoiles3/5 (1)
- Puissance naturelles - Que faire si votre "meilleure partie" est en grève?: Puissance naturelles-améliorer les recours pour augmenter la virilité de la capacité à obtenir une érection de fermetéD'EverandPuissance naturelles - Que faire si votre "meilleure partie" est en grève?: Puissance naturelles-améliorer les recours pour augmenter la virilité de la capacité à obtenir une érection de fermetéÉvaluation : 3.5 sur 5 étoiles3.5/5 (3)
- Semer avec succès pour rassembler avec abundance. Jardin organique et synergique: Calcul des meilleurs jours pour l'ensemencement de chaque légumeD'EverandSemer avec succès pour rassembler avec abundance. Jardin organique et synergique: Calcul des meilleurs jours pour l'ensemencement de chaque légumePas encore d'évaluation
- La pensée dirigée: Traité sur le raisonnement et les logiquesD'EverandLa pensée dirigée: Traité sur le raisonnement et les logiquesÉvaluation : 5 sur 5 étoiles5/5 (2)
- L'Art de La Magie au Bougie Wicca: Le Guide du Débutant à la Pratique de la Magie au Bougie de WiccaD'EverandL'Art de La Magie au Bougie Wicca: Le Guide du Débutant à la Pratique de la Magie au Bougie de WiccaÉvaluation : 3 sur 5 étoiles3/5 (1)