Académique Documents
Professionnel Documents
Culture Documents
Mecanique - Systemes Des Forces - Chap3
Transféré par
G. FreddyTitre original
Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Mecanique - Systemes Des Forces - Chap3
Transféré par
G. FreddyDroits d'auteur :
Formats disponibles
CHAPITRE 3. SYSTÈMES DE FORCES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . - 3.
1 -
3.1. Vecteurs caractéristiques d’un système de forces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . - 3.1 -
3.1.1. Définition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . - 3.1 -
3.1.2. Vecteur “Résultante” des forces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . - 3.2 -
3.1.3. Vecteur “Moment résultant” . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . - 3.3 -
3.1.4. Invariants d’un système de forces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . - 3.3 -
3.2. Réduction d’un système de forces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . - 3.5 -
3.2.1. Principe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . - 3.5 -
3.2.2. Forces concourantes (Théorème de Varignon) . . . . . . . . . . . . . . . . . . . . . . . . . . . - 3.5 -
3.2.3. Axe Central d’un système de force. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . - 3.7 -
3.2.4. Forces quelconques dans l’espace. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . - 3.7 -
3.2.5. Forces coplanaires quelconques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . - 3.13 -
3.2.6. Forces parallèles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . - 3.16 -
A) Coplanaires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . - 3.16 -
B) Forces parallèles dans l’espace. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . - 3.19 -
C) Cas particulier : le couple de forces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . - 3.20 -
3.3. Modifications à l’intérieur d’un système de forces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . - 3.22 -
3.3.1. Changement du point d’application d’une force . . . . . . . . . . . . . . . . . . . . . . . . . - 3.22 -
3.3.2. Décomposition d’une force . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . - 3.23 -
3.3.3. Remplacement du vecteur moment. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . - 3.24 -
Version du 26 avril 2022 (18h12)
CHAPITRE 3. SYSTÈMES DE FORCES
3.1. Vecteurs caractéristiques d’un système de forces
3.1.1. Définition
fig. 3.1. - Systèmes de forces.
On appelle “système de forces” l’ensemble des forces f i (1 # i # n) qui agissent simultanément
sur un point matériel ou sur un solide. Ce système est représenté par un ensemble de vecteurs, en général
glissants, parfois liés (fig. 3.1.).
Lorsqu’un solide est soumis à un tel système de forces, appliquées en différents points, il effectue
généralement un certain mouvement que l’on désire connaître.
Les effets possibles de translation et de rotation du solide, associés à chacune de ces forces et à
chacun des moments de ces forces, s’additionnent vectoriellement. Si un autre système de forces appliqué
à ce solide produit le même mouvement, il est dit “équivalent” au premier. Le système de forces pourrait
dès lors être remplacé par un vecteur “force” unique et un vecteur “moment de force” unique, donnant
les mêmes effets de translation et de rotation du solide. Ces deux vecteurs “équivalents” au système de
forces de départ sont appelés vecteurs caractéristiques du système de forces, il s’agit :
< du vecteur “résultante des forces F ”
< et du vecteur “moment résultant M P ”.
© J-P. Bauche - R. Itterbeek Mécanique - Systèmes de forces - 3.1 -
3.1.2. Vecteur “Résultante” des forces
Définition : C’est la somme vectorielle des forces qui composent le système (fig.
3.2.).
n
F f 1 f 2 f 3 ... f
i1
i
fig. 3.2. - Résultante d’un système de forces.
On a les relations suivantes, dans une base orthonormée Oxyz :
n n n
Fx
i1
fi x ; Fy
i1
fi y ; Fz f
i1
iz
Remarquons que F , vecteur libre construit à partir de f i , n’a pas encore de point d’application
déterminé sur le corps solide considéré.
© J-P. Bauche - R. Itterbeek Mécanique - Systèmes de forces - 3.2 -
3.1.3. Vecteur “Moment résultant”
Définition : C’est la somme vectorielle des moments de chacune des forces par
rapport au point P (fig.3.2.).
n
M P m P f 1 m P f 2 m P f 3 ... m f
i1
P i
Si on calcule le moment résultant par rapport au point O, M O , on obtient :
n
MO
mO f i
i1
m f 1
n
i1
Ox i x mOy f i 1y mOz f i 1z
n n n
i 1 i 1
mOx f i 1x mOy f i 1y mOz f i 1z
i 1
M Ox 1x M Oy 1y M Oz 1z
M Ox y , z : étant le moment résultant par rapport à l’axe x (y, z)
On démontre aisément la formule de changement de centre des moments résultants :
M P M O OP F
n
n
þ MP
i1
mP f i m f OP f
i1
O i i
n
n
MO
i1
OP f i
M O OP
i1
f i
M O OP F
3.1.4. Invariants d’un système de forces
(Voir fig. 3.3.)
A) F est un invariant vectoriel
En effet, F (vecteur libre) est indépendant du choix du point de départ pour sa construction; il
est aussi indépendant du système d’axes utilisé.
B) M P n’est pas un invariant vectoriel
Il faut bien préciser le point P par rapport auquel on calcule le moment résultant du système de
forces, car chacun des moments m P f i change de valeur et de direction suivant la position de P.
© J-P. Bauche - R. Itterbeek Mécanique - Systèmes de forces - 3.3 -
C) M P F est un invariant scalaire
En effet, on peut écrire :
F
M P F M O OP F F M O F OP F F M O F
0
Cet invariant scalaire prouve que, quel que soit le point P considéré, la projection de M P sur la
direction de F est constante ( PQ P Q P Q OR ).
fig. 3.3. - Invariant.
Remarques :
1) Pour un système de forces coplanaires dans Oxy, on a : M P F 0 (P appartenant
au plan des forces) car M P est perpendiculaire au plan des forces et donc suivant 1z
uniquement.
2) Si F 0 alors M P devient un invariant vectoriel :
M P M O OP F M P M O c’est le même vecteur pour tout point de
l’espace.
© J-P. Bauche - R. Itterbeek Mécanique - Systèmes de forces - 3.4 -
3.2. Réduction d’un système de forces
3.2.1. Principe
Réduire un système de forces f i en un point O, c’est le remplacer par ses deux vecteurs
caractéristiques F et M O , F étant un invariant vectoriel et M O dépendant de la position de O.
Discutons brièvement quelques cas particuliers.
1) F 0 et M O 0
Dès lors : M P M O OP F M O 0 .
Le système de forces est équivalent à 0 au point O et donc en tous points de l’espace.
Ce système n’est susceptible de produire ni translation, ni rotation autour d’un point
quelconque de l’espace.
Le point ou le solide soumis à un tel système de forces est dit “en équilibre”.
2) F 0 et M O 0
Dès lors : M P M O OP F M O 0 .
Le système de forces est équivalent au seul vecteur M O , et ce en tout point de l’espace. Une
telle réduction est obtenue dans le cas des couples de forces (voir § 3.2.3. Remarque).
Le seul mouvement possible associé sera un mouvement de rotation.
3) F 0 et M O 0
Le seul mouvement possible associé sera un mouvement de translation.
4) F 0 et M O 0
En un point P de l’espace, on réduit le système de forces f i en F et M P formant entre eux
un angle θ. On démontrera l’existence de “lieux de points” particuliers (pour lesquels M P
est nul, ou minimum ...).
3.2.2. Forces concourantes (Théorème de Varignon)
Considérons le cas de plusieurs forces f 1 , f 2 , ... , f n dont les lignes d’action sont toutes
concourantes en un point A (fig. 3.4.). Déterminons vectoriellement la résultante F , et plaçons-la sur une
ligne d’action passant par A.
Calculons le moment résultant M O :
n
n
n
MO
i1
mO f i
i1
OA f i
OA
i1
fi
M O OA F mO F
puisque F passe par A, suivant la construction utilisée.
© J-P. Bauche - R. Itterbeek Mécanique - Systèmes de forces - 3.5 -
fig. 3.4. - Théorème de Varignon.
Donc, le théorème de Varignon s’énonce de la manière suivante :
“Dans un système de forces concourantes en A, le moment résultant (par rapport
à un point quelconque) est égal au moment de la résultante (par rapport au même
point), localisée sur une ligne d’action passant par le point de concours des forces
qui composent le système”.
Cette position particulière de la ligne d’action de F prend le nom d’axe central du système de
forces.
Dans le cas des forces concourantes, pour tout point P de l’axe central, on a :
M P mP F 0
ce qui signifie que la réduction du système de forces, faite en un point quelconque de l’axe central, se
résume en l’application de la seule résultante F , équivalente au système de forces, à la fois pour la
translation et pour la rotation.
© J-P. Bauche - R. Itterbeek Mécanique - Systèmes de forces - 3.6 -
3.2.3. Axe Central d’un système de force
Définition : L’axe central (AC) d’un système de force est le lieu géométrique des
points par rapport auxquels le moment résultant est minimum.
Conséquence :
Les vecteurs résultant F et moment résultant M P (avec P AC ) sont colinéaires.
Autrement dit : lorsqu’on réduit un système de forces en un point P de cet axe central, le moment
résultant sera minimum et sera colinéaire avec la résultante des forces.
3.2.4. Forces quelconques dans l’espace
Dans un système de forces quelconques dans l’espace, la réduction en un point Q quelconque
donnera une résultante F et un moment résultant M Q qui ne seront pas nécessairement alignés.
La figure fig. 3.5. schématise cette situation ainsi que la réduction du système en différents points
Q’ et Q" de l’espace.
fig. 3.5. - Forces quelconques dans l’espace.
F et M Q font entre eux un angle θQ’; F et M Q forment un angle θQ" ; on a cependant :
F M Q F M Q (Invariant scalaire)
On définira dès lors l’axe central du système de force comme étant le lieu des points P pour
lesquels F et M P sont sur la même ligne d’action, ce qui entraîne que M P prend une valeur minimum
(pouvant être nulle).
Pour trouver l’expression vectorielle de ce lieu de points de l’axe central, exprimons que F et M P
sont parallèles (produit vectoriel nul).
© J-P. Bauche - R. Itterbeek Mécanique - Systèmes de forces - 3.7 -
F MP 0 F M O OP F 0
F M O F OP F 0
F M O OP F F F OP F
Choisissons, parmi ces points P, le point de pénétration de l’axe central dans le plan π
perpendiculaire à F et passant par O; soit P’ ce point (fig. 3.6.). Dans ce cas OP est z à F et donc :
OP F 0 et l’expression précédente peut se mettre sous la forme :
F MO
F M O OP F F F OP F OP 2
F (éq. 3.81.)
0
fig. 3.6. - Forces quelconques : axe central.
L’ensemble des points P constituant l’axe central peut se définir vectoriellement par :
F MO
OP OP P P Y OP 2 m F m R
F
En effet, on peut vérifier que M P M P PP F M P donc toujours aligné avec F et
0 car / /
de module minimum.
© J-P. Bauche - R. Itterbeek Mécanique - Systèmes de forces - 3.8 -
Remarque :
On peut calculer cette valeur minimale du moment résultant ( M P min ). Utilisons la
propriété de l’invariance scalaire du produit F M P . Soit :
F M P min F M Q F M P min cos F M Q
Les deux vecteurs F et M p min sont alignés, cela implique que cos 1 :
+1 : si F et M p min sont de même sens;
!1 : si F et M p min sont de sens contraires.
F MQ F M Q cos Q
M P min M Q cos Q
F F
Déterminons les différents plans définissant cet axe central. Soit :
F MO
< 2 X 1x Y 1y Z 1z
F
et < P (x; y; z)
les équations paramétriques de l’axe central sont dès lors :
x X m Fx
y Y m Fy
z Z m Fz
qui, si Fx, Fy et Fz sont différents de 0, donnent les équations cartésiennes :
x X yY
1
Fx Fy
x X yY z Z yY z Z
m Y 2
Fx Fy Fz Fy Fz
x X zZ
3
Fx Fz
Ces trois plans se coupent selon l’axe central (fig. 3.7.). (Axe central = intersection de 2 plans
particuliers).
© J-P. Bauche - R. Itterbeek Mécanique - Systèmes de forces - 3.9 -
fig. 3.7. - Détermination de l’axe central pour des forces quelconques.
Remarque :
La connaissance des deux vecteurs caractéristiques F et M Q en un point Q
n’appartenant pas à l’axe central permet aussi de déterminer l’équation vectorielle de
l’axe central (fig. 3.8.).
fig. 3.8. - Axe central : autre manière.
OP OQ QP OQ QP m F
m R
Avec P un point de l’axe central.
Or QP peut s’exprimer sous la forme (voir éq. 3.81.) :
© J-P. Bauche - R. Itterbeek Mécanique - Systèmes de forces - 3.10 -
F MQ
QP 2
F
et ainsi OP donne la droite de l’axe central.
F MQ
OP OQ 2 m F
F
Géométriquement, il faut donc, pour trouver le point P’ de l’axe central, se déplacer sur
la perpendiculaire en Q au plan formé par F et M Q , d’une distance d :
F MQ F M Q sin Q M Q sin Q
d QP 2 2
F F F
(le sens de déplacement de d est défini par la règle de la main droite ( F M Q d )).
On définit le moment de transport comme étant :
F d M Q sin Q
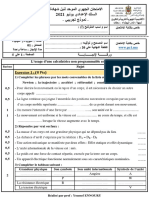
Application 3.1. Un pylône de 40 m de hauteur est
soumis aux forces suivantes :
< f P 8 000 N : poids appliqué en G (0; 0; 16);
sens des z décroissants;
< f 1 2 500 N : action du vent, située dans les
plans 1 z 18 m et 2 x y 0 ; sens des
x décroissants;
< f 2 f 3 f 4 1200 N : résultantes des
poids des câbles, appliquées en A2 (0; !6; 38), A3
(0; !6; 32) et A4 (0; +6; 35); sens des z
décroissants.
En vue du calcul des fondations, réduire ce système
de forces en O. Déterminer la position de l’axe
central et le moment minimum sur cet axe central.
fig. 3.9. - Application 3.1.
Solution :
Expression analytique des forces
< f P 8 000 1z
© J-P. Bauche - R. Itterbeek Mécanique - Systèmes de forces - 3.11 -
BA
< f 1 f 1 1d f 1 avec, par exemple : B 1; 1; 18 et A 0; 0; 18
BA
1x 1y 0 1z
f 1 2 500 1768 1x 1768 1y
2
< f 2 1200 1z f 3 f 4
Expression de la résultante
5
F
f i 1768 1x 1768 1y 11600 1z
i1
2
F 1768 2 1768 2 11600 2 140.8 10 6
Expression du moment résultant (réduction du système en O)
5
M O mO f i 0 31820 1x 31820 1y 7 200 1x 7 200 1x 7 200 1x
i 1
39 020 1x 31820 1y
Equation de l’axe central
F MO
OP 2 m F 2.621 1x 3.214 1y 0.89 1z m F
F
x X y Y z Z x 2.621 y 3.214 z 0.89
Fx Fy Fz 1768 1768 11600
Le premier et le second terme donne :
1 x y 0.593
Le premier et le troisième terme donne :
2 6.562 x z 18.08
L’équation de l’axe central étant l’intersection de ces 2 plans.
Recherche du moment minimum
F MO
M P min 1073 Nm
F
F M O est négatif ce qui indique que F et M P min sont de sens contraire.
© J-P. Bauche - R. Itterbeek Mécanique - Systèmes de forces - 3.12 -
3.2.5. Forces coplanaires quelconques
Considérons un système de forces f i coplanaires (fig. 3.10.). En O, le système se réduit à F et
MO .
M O étant perpendiculaire au plan de la feuille, on le représentera conventionnellement par un
petit arc de cercle fléché tel que représenté sur la figure fig. 3.10..
fig. 3.10. - Forces coplanaires quelconques.
Etablissons, dans ce cas, l’équation de l’axe central de ce système de forces coplanaires.
Partons de la formule générale. Soit :
F MO
OP 2 m F m R
F
Soit en 2 dimensions :
< P (x; y)
< F Fx 1x Fy 1y
< M O M Oz 1z
L’équation générale devient :
1x 1y 1z
Fx Fy 0
0 0 M Oz
OP x 1x y 1y 2 m Fx 1x Fy 1y
F
D’où :
© J-P. Bauche - R. Itterbeek Mécanique - Systèmes de forces - 3.13 -
Fy M Oz
x 2 m Fx
F m 1 x Fy M Oz
Fx F
2
Fx M Oz
y 2 m Fy
F Fx M Oz Fx
2
Fy Fy M Oz
y 2 F xF
z 0 F x x F F 2
x
D’où :
M
y Fx x Fy Oz2 Fx2 Fy2
F
Et donc nous trouvons :
x Fy y Fx M Oz
C’est l’équation de l’axe central pour des forces coplanaires (c’est une droite).
On remarquera aisément que dans le cas des forces coplanaires, pour tous points P appartenant
à l’AC, nous avons : M P 0 , qui est bien le moment résultant minimum.
Application 3.2. Cas de forces
coplanaires concourantes. Pour le
montage proposé ci-contre, déterminer
la résultante de ce système de force
ainsi que l’équation de l’axe central.
Solution :
Expression analytique des forces
f 1 40 1y
f 2 40 1x
f 3 60 cos 45 1x
60 sin 45 1y
30 2 1x 30 2 1y fig. 3.11. - Application 3.2.
f 4 50 cos180 105 1x
50 sin180 105 1y
12.94 1x 48.30 1y
Résultante des forces
4
F
f i 0 40 30 2 12.94 1x 40 0 30 2 48.30 1y
i1
69.49 1x 50.73 1y
© J-P. Bauche - R. Itterbeek Mécanique - Systèmes de forces - 3.14 -
F 69.49 2 50.732 86.04 N
Moment résultant
M Oz 0 (évident !)
Equation de l’ AC
x Fy y Fx M Oz
x 50.73 y 69.49 0
50.73
AC y x
69.49
y 0.730 x
Dans ce cas-ci on aurait pu aussi
procéder de manière géométrique. Soit :
Pente : fig. 3.12. - Position de l’AC.
F 50.73
tan x 0.730
Fy 69.49
361 .
Equation :
AC y 0.730 x
Application 3.3. Cas de forces
quelconques. Dans un plan orienté Oxy, on
donne les quatre forces suivantes :
f 1 400 1x , appliquée en A1 (0; 1);
f 2 120 1y , appliquée en A2 (!3; 4);
f 3 100 1x , appliquée en A3 (2; 4);
f 4 180 1y , appliquée en A4 (2; 5).
Déterminer l’équation de l’axe central de ce
système de force.
fig. 3.13. - Application 3.3.
Solution :
Recherche de la résultante
n
F f i 300 1x 300 1y Fx 1x Fy 1y
i1
Recherche du moment résultant
n
MO
m P f i mO f 1 mO f 2 mO f 3 mO f 4
i1
400 1z 360 1z 400 1z 360 1z 0
© J-P. Bauche - R. Itterbeek Mécanique - Systèmes de forces - 3.15 -
Equation de l’axe central
x Fy y Fx M Oz 300 x 300 y 0 x y
On vérifiera aisément que le moment résultant M P est nul pour tout point P de l’axe central.
Vérification du résultat par la formule générale
F MO
OP 2 m F 0 m 300 1x 300 1y
F
avec : OP x 1x y 1y z 1z
x 1x y 1y z 1z 300 m 1x 300 m 1y
x 300 m
y 300 m x y
z 0
3.2.6. Forces parallèles
A) Coplanaires
Considérons un système de forces f 1 , f 2 , ... , f n parallèles et coplanaires. Pour simplifier,
supposons que leur ligne d’action est parallèle à l’axe Oy, en des points d’abscisses x1, x2, x3, ... xn, à
partir de l’origine O (fig. 3.14.).
fig. 3.14. - Forces coplanaires parallèles (à l’axe Oy).
Appliquons, à nouveau l’équation générale. Soit :
F MO
OP 2 mF m R
F
© J-P. Bauche - R. Itterbeek Mécanique - Systèmes de forces - 3.16 -
Avec, cette fois-ci :
< P (x; y)
< F Fy 1y
< M O M Oz 1z
L’équation générale devient :
1x 1y 1z
0 Fy 0
0 0 M Oz
OP x 1x y 1y 2
m Fy 1y
Fy
Fy M Oz
x 2
D’où : Fy
y m Fy
L’équation devient donc :
Fy M Oz
x AC 2
Fy
Fx M Oz
Et dans le cas de forces parallèles à l’axe Ox, on obtiendrait : y AC 2
Fx
La résultante F ainsi placée sur cet AC est équivalente au système de forces, à la fois pour la
translation et pour la rotation. Le moment résultant M P est nul pour tout point P de l’axe central; pour
tout point R n’appartenant pas à l’axe central, M R est non nul et perpendiculaire à F (rappel : M R F
est un invariant scalaire, nul dans ce cas-ci).
La réduction du système des forces f i , en un point de l’axe central, consiste ainsi en la seule
force F .
Une autre manière d’aborder le cas des forces parallèles est d’utiliser le théorème de Varignon
étendu aux systèmes de forces parallèles (point d’intersection rejeté à l’infini); dès lors :
n
M Oz mOz F
xi f i y x AC Fy
i1
où xAC représente l’abscisse de l’axe central du système de forces, parallèle aussi à l’axe Oy :
n n
x
i1
i fi y x
i1
i fi y
x AC n
Fy
f
i1
iy
© J-P. Bauche - R. Itterbeek Mécanique - Systèmes de forces - 3.17 -
Application 3.4. On considère une grue
roulante. Les charges qui la sollicitent sont, de
la gauche vers la droite :
< le poids f P 1 (20 kN) (charge à soulever);
< le poids f P 2 (15 kN) de la partie mobile;
< le poids f P 3 (25 kN) du chariot;
< le contre-poids f P 4 (36 kN).
Déterminer la résultante F de ces charges, et fig. 3.15. - Application 3.4.
vérifier si la grue est stable dans la position
indiquée.
Solution :
1er manière
Détermination de la résultante
Axe Oy vertical et positif vers le haut.
4
F f i 20 15 25 36 1y 96 1y
i1
Détermination du moment résultant
Par rapport au point A :
M A M Oz f P1 5 f P 2 1 f P 3 1 f P 4 35
. 1z
36 1z
Formule générale
Fy M Oz 96 36
x AC % A 2 0.375 m
Fy 96 2
2ième manière
Position de l’axe central
A x AC
f iy xi
f iy
20 5 15 1 25 1 36 35.
96
0.375 m
Conclusion
L’AC se trouve entre les 2 roues (appuis), donc la grue est stable.
© J-P. Bauche - R. Itterbeek Mécanique - Systèmes de forces - 3.18 -
B) Forces parallèles dans l’espace
Soit :
F MO
< on utilise la formule générale : OP 2 m F m R
F
< on utilise le théorème de Varignon étendu aux systèmes de forces parallèles et dans le cas
général où les forces parallèles se trouvent dans une base orthonormée Oxyz, orientée de telle
façon que Oz soit parallèle aux forces, les équations de l’axe central seront :
n n
x
i1
i fi z y i fi z
i1
x AC et y AC
Fz Fz
Cette position de l’axe central est indépendante du choix du systèmes d’axes.
Application 3.5. Dans un espace orienté Oxyz, on
donne les forces suivantes :
f 1 100 1z , appliquée en A1 (1; 2; 3);
f 2 50 1z , appliquée en A2 (-1; 0; 2);
f 3 20 1z , appliquée en A3 (6; 2; 1);
f 4 120 1z , appliquée en A4 (1; 2; 0).
Déterminer la position de l’axe central de ce système
de force.
Solution :
1er manière
Recherche de la résultante
n
F
f i z 100 50 20 120 1z
i1
fig. 3.16. - Application 3.5.
50 1z
Recherche du moment résultant
1x 1y 1z 1x 1y 1z 1x 1y 1z 1x 1y 1z
MO 1 2 3 1 0 2 6 2 1 1 2 0
0 0 100 0 0 50 0 0 20 0 0 120
0 1x 50 1y 0 1z
Appliquons la formule générale
1x 1y 1z
0 0 50
F MO 0 50 0
OP 2 mF 2
m 50 1z 1x m 50 1z
F 50
© J-P. Bauche - R. Itterbeek Mécanique - Systèmes de forces - 3.19 -
D’où, l’AC a pour équation :
1 x 1
AC 2 y 0
z 50 m / / Oz
2ième manière
Recherche de la position de l’axe central
n
x
i1
i fi z
x AC n
f
i1
iz
1 100 1 50 6 20 1 120
1
50
n
y
i1
i fi z 2 100 0 50 2 20 2 120
y AC 0
Fz 50
L’axe central a ainsi pour équation :
x 1
AC 1
2 y 0
tel que représenté sur la figure.
On vérifiera aisément que pour tout point P (1; 0; zP) de l’axe central, M P 0 .
On retrouve effectivement la même position pour l’AC.
C) Cas particulier : le couple de forces
fig. 3.17. - Couples de forces.
Un système de deux forces opposées (forces parallèles de même module mais de sens contraires
( f 1 f 2 ) agissant sur un corps, est appelé “couple de forces” (fig. 3.17.).
Un système de forces qui forment un couple n’est évidemment pas en équilibre, bien que la
résultante F f 1 f 2 f 1 f 1 0 soit nulle.
© J-P. Bauche - R. Itterbeek Mécanique - Systèmes de forces - 3.20 -
L’action d’un couple de force sur un solide se réduit à un effet de rotation, caractérisé par le
moment du couple, qui est indépendant du point par rapport auquel on le calcule (fig. 3.18.).
M O mO f 1 mO f 2 OA f 1 0
M O f 1 OA sin f 1 d f 2 d
et
d
avec : d la distance (“bras de levier”) entre les deux forces.
De plus : M P M O OP F M O et ce pour tout point P.
0
fig. 3.18. - Couple de forces et changement de centre.
La direction de M O est perpendiculaire au plan des deux forces, son sens est donné par la “règle
de la main droite”.
Deux couples de forces seront dits équivalents si ils donnent lieu au même moment, ce qui
signifie que ces couples doivent être situés dans des plans parallèles, et que le produit f i d i doit rester
constant (la longueur du bras de levier di pouvant changer, à condition que f i s’adapte).
© J-P. Bauche - R. Itterbeek Mécanique - Systèmes de forces - 3.21 -
3.3. Modifications à l’intérieur d’un système de forces
3.3.1. Changement du point d’application d’une force
Etant donné une force f appliquée en un point A et dont la ligne d’action est l’axe a (fig. 3.19.),
il est souvent intéressant pour la réduction ou pour l’étude du mouvement d’un solide, de pouvoir
“transporter” cette force en un point B non situé sur l’axe a.
fig. 3.19. - Changement de centre.
Ajoutons en B une force f 1 équipollente à f et f 2 réciproque à f 1 (fig. 3.19 b.). Le système
comprenant f , f 1 et f 2 est équivalent à f , puisque f 1 et f 2 ont une résultante et un moment résultant
nuls.
Mais on peut le considérer sous la forme du système de la figure 3.19 c.. toujours équivalent à f
et comprenant la force f 1 (égal à f transportée en B) et le couple des deux forces f et f 2 dont le
moment par rapport à B se réduit à mB f .
On peut donc transporter une force f d’un point A en un point B, à condition d’ajouter un
couple de forces dont le moment vaut mB f , moment par rapport à B de la force f appliquée à l’ancien
point A.
Ce moment mB f , qui doit apparaître, est appelé “couple de transport”.
Autre approche : on peut réduire le “système” de force en B.
F f
et F et M B sont équivalents à f .
M B mB f
L’exemple suivant peut illustrer cette notion. Pour maintenir une barre homogène AB en
équilibre, il faut, de toute évidence, appliquer en son milieu une force dirigée vers le haut reprenant le
poids de la barre.
© J-P. Bauche - R. Itterbeek Mécanique - Systèmes de forces - 3.22 -
fig. 3.20. - Couple de transport.
Pour maintenir la barre par son extrémité A, il faut appliquer, outre la force f q , un moment de
AB
module égal à m A f q fP
2
(fig. 3.20.). Ces considérations sont directement “ressenties” par la
main de la personne qui maintient la barre en équilibre.
3.3.2. Décomposition d’une force
Sans rien changer aux caractéristiques d’un système de forces, il est toujours possible :
A) de remplacer une force f dont la ligne d’action passe par un point A, par deux ou plusieurs forces
dont les lignes d’action passent également par A pourvu que f f 1 f 2 ... .
fig. 3.21. - Décomposition d’une force en 2 directions non parallèles.
B) de remplacer une force f par deux ou plusieurs forces f 1 , f 2 , ... dont les lignes d’action sont
parallèles à celle de f pourvu que :
f f 1 f 2 ...
M P 0
pour P point quelconque de la ligne d’action de f .
En particulier, pour décomposer f en 2 forces parallèles, on a comme conditions :
f f1 f 2 ( somme algébrique)
et
f d f 2 d2
1 1
© J-P. Bauche - R. Itterbeek Mécanique - Systèmes de forces - 3.23 -
fig. 3.22. - Décomposition d’une force en 2 directions
parallèles.
3.3.3. Remplacement du vecteur moment
Soit un moment mO f appliqué en O. On peut remplacer ce moment par un couple de forces f
et f , dans un plan π perpendiculaire à mO f , espacées d’une distance d telle que f d mO f
(fig. 3.23.). Il existe donc une infinité de directions de f et une infinité de modules de f qui soient
possibles.
fig. 3.23. - Remplacement d’un vecteur force par un couple de
forces.
© J-P. Bauche - R. Itterbeek Mécanique - Systèmes de forces - 3.24 -
Vous aimerez peut-être aussi
- Ondes Et VibrationsDocument147 pagesOndes Et VibrationsAlaa Bouarfa80% (5)
- Cours de Structure PDFDocument67 pagesCours de Structure PDFstoufa73100% (2)
- Dynamique: Les Grands Articles d'UniversalisD'EverandDynamique: Les Grands Articles d'UniversalisPas encore d'évaluation
- Statique Introduction RDM CM 2018Document121 pagesStatique Introduction RDM CM 2018Aly GAMALEDDYN100% (1)
- TD LevéDocument28 pagesTD LevéRafik Saada100% (2)
- Cremona Ritter Callaud CastiglianoDocument61 pagesCremona Ritter Callaud CastiglianoStanley Adu Al MalikPas encore d'évaluation
- Guide de Prescription Second OeuvreDocument220 pagesGuide de Prescription Second OeuvrereddylPas encore d'évaluation
- RDM Cours° EsbtpDocument66 pagesRDM Cours° EsbtpKouadio Kouadio SéverinPas encore d'évaluation
- Cours de Structure PDFDocument67 pagesCours de Structure PDFAbdel Aziz Toumi100% (2)
- Cours Modelisation Des AM (GOP)Document19 pagesCours Modelisation Des AM (GOP)Bassma Mrani100% (1)
- 13 Statique CoursGJDocument6 pages13 Statique CoursGJRadwane LourhmatiPas encore d'évaluation
- Statique AppliqueeDocument31 pagesStatique AppliqueeSaid Mrf100% (1)
- Travaux Pratiques MecaniqueDocument53 pagesTravaux Pratiques MecaniqueMounir Belheouane33% (3)
- MecaChap5 (Statique)Document39 pagesMecaChap5 (Statique)sawyaw100% (1)
- 07 CoursDocument8 pages07 CoursPseudo785Pas encore d'évaluation
- Sti MG - Géométrie Des MassesDocument19 pagesSti MG - Géométrie Des Massesmeoh eezaPas encore d'évaluation
- Poly RDM 2016Document65 pagesPoly RDM 2016Bella cedricPas encore d'évaluation
- Corps de Precis Meca Appliquee 1 F4Document147 pagesCorps de Precis Meca Appliquee 1 F4Jean Jules Badiang100% (1)
- Le Mouvement Élève TC BIOFDocument8 pagesLe Mouvement Élève TC BIOFHk HjPas encore d'évaluation
- MecaChap4 (GeomDesMasses)Document42 pagesMecaChap4 (GeomDesMasses)soroPas encore d'évaluation
- Fes Meknes Examen Regional PC 2021 SujetDocument3 pagesFes Meknes Examen Regional PC 2021 SujetAhmed Taha RazinPas encore d'évaluation
- 2 - Cinématique Du SolideDocument27 pages2 - Cinématique Du Solidefle92Pas encore d'évaluation
- MecaChap4 (GeomDesMasses) PDFDocument42 pagesMecaChap4 (GeomDesMasses) PDFKRONH CHHYTHEANPas encore d'évaluation
- Cours Elasticite1Document93 pagesCours Elasticite1Haza HazzaPas encore d'évaluation
- ACFrOgBohzQ-RSiqZXgbrBlQFZEgzhCdFxy2 6PTLeHmMnBimQKV2TinNjM3CPl5CSyONdMEXGf6Jc7IsvOdIJtCrvqeXoZaDRgcgvKevnU1fptM XAbUr4b2xLWl8M PDFDocument8 pagesACFrOgBohzQ-RSiqZXgbrBlQFZEgzhCdFxy2 6PTLeHmMnBimQKV2TinNjM3CPl5CSyONdMEXGf6Jc7IsvOdIJtCrvqeXoZaDRgcgvKevnU1fptM XAbUr4b2xLWl8M PDFsouad benrebhaPas encore d'évaluation
- Polycopie de STATIQUE DU SOLIDE GME KARGADocument79 pagesPolycopie de STATIQUE DU SOLIDE GME KARGASylvain HeumiPas encore d'évaluation
- TP VooDocument16 pagesTP VooAbdou KefaifiPas encore d'évaluation
- Cours MECA 4Document15 pagesCours MECA 4ClémentPas encore d'évaluation
- MecaChap2 (ForcesMoments)Document12 pagesMecaChap2 (ForcesMoments)IdrissBarinePas encore d'évaluation
- Chapitre 1Document22 pagesChapitre 1ISLI et TISLITPas encore d'évaluation
- Chapitre 2Document8 pagesChapitre 2Arsene KouamePas encore d'évaluation
- RDM Promotion 2020Document61 pagesRDM Promotion 2020Nac SemPas encore d'évaluation
- Cours Physique-Chimie Terminale F: Cours Rédigé Par COLINCE NDE (PLEG) 1Document66 pagesCours Physique-Chimie Terminale F: Cours Rédigé Par COLINCE NDE (PLEG) 1Arsène Mouanda5Pas encore d'évaluation
- Cours RDM CposDocument39 pagesCours RDM CposAndoche MampassiPas encore d'évaluation
- Cours RDM Chapitre IIDocument9 pagesCours RDM Chapitre IIArsene KouamePas encore d'évaluation
- Version Du 11 Août 2022 (12h59)Document13 pagesVersion Du 11 Août 2022 (12h59)Stan YannPas encore d'évaluation
- Microsoft Word - STRM TD 2Document2 pagesMicrosoft Word - STRM TD 2Abdou OuChPas encore d'évaluation
- Amortisseffi: 1' - EahmDocument3 pagesAmortisseffi: 1' - Eahmsaif ben haliamPas encore d'évaluation
- CoursmodelisationAM PDFDocument7 pagesCoursmodelisationAM PDFSamagassi SouleymanePas encore d'évaluation
- Physique Dynamique 4tqsc 2Document30 pagesPhysique Dynamique 4tqsc 2Barthélemy HoubenPas encore d'évaluation
- PC 1bac Tome 1 SX SM FDocument46 pagesPC 1bac Tome 1 SX SM Fصابور العربيPas encore d'évaluation
- Chapitre 04 - Poutres ContinuesDocument15 pagesChapitre 04 - Poutres ContinuesrabehiPas encore d'évaluation
- 04 Principes de NewtonDocument14 pages04 Principes de NewtonIdriss NanaPas encore d'évaluation
- Série 2 - La Loi D'additivité Des TensionsDocument3 pagesSérie 2 - La Loi D'additivité Des TensionsHiba MouridPas encore d'évaluation
- 19 Toutelamecanique 1Document6 pages19 Toutelamecanique 1HMH HMHPas encore d'évaluation
- Equilibre D'un Corps Sous L'action de 2 ForcesDocument6 pagesEquilibre D'un Corps Sous L'action de 2 Forceskiller ffPas encore d'évaluation
- Chapitre 03 - Méthode Des Forces 2018Document9 pagesChapitre 03 - Méthode Des Forces 2018rabehiPas encore d'évaluation
- Physique MP 2Document6 pagesPhysique MP 2susu XXPas encore d'évaluation
- Projet ComposantDocument1 pageProjet Composantmemoire.licence.master2Pas encore d'évaluation
- Cours Mecanique Rationnelle 2022Document59 pagesCours Mecanique Rationnelle 2022boufnikahmed7Pas encore d'évaluation
- 08 TriphaseDocument33 pages08 TriphaseAlassane AbdoussalamiPas encore d'évaluation
- Terminarle F PhysiqueDocument69 pagesTerminarle F PhysiqueGuillaume WoukouoPas encore d'évaluation
- MMC LeDocument106 pagesMMC LeMohamed TAGUIOUINEPas encore d'évaluation
- 2f EquivalenceDocument44 pages2f EquivalenceAyman KnidilePas encore d'évaluation
- ExposeDocument11 pagesExposeYaCiNe DZPas encore d'évaluation
- Examen Reg Blanc (Op - FR) N°1 (2021) (WWW - Pc1.ma)Document4 pagesExamen Reg Blanc (Op - FR) N°1 (2021) (WWW - Pc1.ma)chouaki marouanePas encore d'évaluation
- Chapitre 3-StatiqueDocument9 pagesChapitre 3-Statiqueatamed32100% (1)
- L Installation Electrique Domestique Exercices Non Corriges 1Document3 pagesL Installation Electrique Domestique Exercices Non Corriges 1hamza manafPas encore d'évaluation
- Cours Chapitre I RDMDocument6 pagesCours Chapitre I RDMy48jzbz6q9Pas encore d'évaluation
- Cours de Statique 3DDocument6 pagesCours de Statique 3DSmith FrankPas encore d'évaluation
- Les Contraintes C-Mohr MMCDocument28 pagesLes Contraintes C-Mohr MMCTahar Ghili100% (1)
- 2017 Liban Exo1 EnonceDocument1 page2017 Liban Exo1 EnonceKhalil ChhataPas encore d'évaluation
- 2018 CC2 S1 TD2 Sujet 2 CorDocument3 pages2018 CC2 S1 TD2 Sujet 2 CorDABAKH LDEEBOY100% (1)
- Chingatome Sacados 24 - 01 - 09 9 12Document2 pagesChingatome Sacados 24 - 01 - 09 9 12Birdi LimiPas encore d'évaluation
- Exercice 1:: Cée Privé PYTHAGORE Mohammedia Bac SM (2022-2023)Document3 pagesExercice 1:: Cée Privé PYTHAGORE Mohammedia Bac SM (2022-2023)Resairus sssPas encore d'évaluation
- Iii - 1-Introduction: Chapitre 03 Etude de TraficDocument6 pagesIii - 1-Introduction: Chapitre 03 Etude de TraficAmin MinouPas encore d'évaluation
- 2013 Cours Analyse Complexe L3 FabDocument225 pages2013 Cours Analyse Complexe L3 FabEddahbi EttahiriPas encore d'évaluation
- PDF S6 Calcul Réacteurs Industriels 22-23Document62 pagesPDF S6 Calcul Réacteurs Industriels 22-2347-OKOLO Hugues.Pas encore d'évaluation
- Corrigé Exo Série 6 (2 ET 3)Document24 pagesCorrigé Exo Série 6 (2 ET 3)DROUA MessaoudaPas encore d'évaluation
- Electrostatique MagnétostatiqueDocument56 pagesElectrostatique MagnétostatiquebahriPas encore d'évaluation
- TP DTSDocument37 pagesTP DTSImane ErroukhePas encore d'évaluation
- 13 Leçons ODG MamaitDocument13 pages13 Leçons ODG MamaitEsbeh MJPas encore d'évaluation
- Série 2 S1Document1 pageSérie 2 S1saranora2007nPas encore d'évaluation
- Initiation Solaire Chapitre 2Document9 pagesInitiation Solaire Chapitre 2YidoPas encore d'évaluation
- Memoire FiniDocument187 pagesMemoire FiniPrynce NtwalaPas encore d'évaluation
- CHEC - OM - Application N°3 - Etude de La Connexion - VDDocument12 pagesCHEC - OM - Application N°3 - Etude de La Connexion - VDMarioPas encore d'évaluation
- Essai DPTDocument12 pagesEssai DPTSaharPas encore d'évaluation
- Rapport D'exposéDocument21 pagesRapport D'exposéAbd Elkader BouchenafaPas encore d'évaluation
- Tp-Jet-Eau 2024Document6 pagesTp-Jet-Eau 2024ayouta rezguiPas encore d'évaluation
- TD Effort TranchantDocument5 pagesTD Effort TranchantAd EmPas encore d'évaluation
- Courbes de LorenzDocument3 pagesCourbes de LorenzOctinionPas encore d'évaluation
- M1 Mecanique Et Fiabilite Des Structures 2021-2022Document22 pagesM1 Mecanique Et Fiabilite Des Structures 2021-2022Yahiyaoui SofyanePas encore d'évaluation
- Modélisation Des ProcédésDocument15 pagesModélisation Des ProcédésFilaliAbderrahimPas encore d'évaluation
- Analyse Numerique Evolution Gabriel Turinici 20210323Document54 pagesAnalyse Numerique Evolution Gabriel Turinici 20210323Dada BabaPas encore d'évaluation
- République Algérienne Démocratique Et Populaire: TravauxDocument5 pagesRépublique Algérienne Démocratique Et Populaire: TravauxKim KydaniPas encore d'évaluation
- Specification Technique: Câbles BT Armés Isolés Pour Lignes Et Postes ÉlectriqueDocument9 pagesSpecification Technique: Câbles BT Armés Isolés Pour Lignes Et Postes ÉlectriqueOUSKRIPas encore d'évaluation
- Travail PanpsychismeDocument8 pagesTravail PanpsychismeCarlaPas encore d'évaluation
- Calcul VectorielDocument3 pagesCalcul VectorielKamel HamdiPas encore d'évaluation
- CTSC - NIT259 GéothermieDocument108 pagesCTSC - NIT259 Géothermiealexandros vezyropoulosPas encore d'évaluation