Académique Documents
Professionnel Documents
Culture Documents
EXAM TAS - 26-06-2004 - Corrige Sujet
Transféré par
el bekkary HajarTitre original
Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
EXAM TAS - 26-06-2004 - Corrige Sujet
Transféré par
el bekkary HajarDroits d'auteur :
Formats disponibles
CNAM de Saclay Corrigé de l'Examen : Traitement Analogique du Signal (2) 26 juin 2004
Ce document donne souligné ou encadré en vert, les réponses du devoir de Traitement Analogique du Signal du 26 juin
2004. Il comporte également des calculs et explications qui n'étaient pas attendus dans le cadre de l'examen.
1- Filtrage analogique
1-1- Pour un filtre passe bas, le gain de +20 dB dans la bande passante, correspond à une amplification de10
(20 log(10) = +20dB ) lorsque F << F0 avec F0 = ω 0
2π
10
H ( jω ) = 2
ω ω
1 + 2mj + j
ω 0 ω 0
1-2- Pour passer d'un filtre passe bas du second ordre, à un filtre passe haut du second ordre, il faut effectuer le
changement de variable suivant : jω 1 Ω
= = 0
ω0 jΩ jΩ
Ω0
2 2
Ce changement donne jΩ jΩ
H ( jΩ ) =
1
H ( jΩ ) = Ω0 Ω0
2 H ( jΩ ) =
Ω Ω jΩ
2
Ω Ω
2
jΩ jΩ
2
1 + 2m 0 + 0 1 + 2m 0 + 0 1 + 2m +
jΩ jΩ
Ω 0 jΩ jΩ
Ω 0 Ω 0
puis en multipliant le ce qui après simplification donne bien Note :
De la même façon, il existe un
numérateur et le dénominateur la fonction de transfert d'un filtre passe changement de variable pour passer
2
haut du second ordre
par jΩ , on obtient d'un filtre passe bande ou coupe bande
Ω à un filtre passe bas (voir poly AE2
0 CNAM tome 1 page 113 et 114)
1-3- Réaliser un filtre passe haut répondant au cahier des charges suivant :
• Pas d'ondulation dans la bande passante.
Lecture du gabarit :
Fa=50Hz; G0=20dB
G (dB) Le gain dans la bande passante est :
G0 = +20dB.
Le gain minimum dans la bande passante
est : Gpmin = +19,5dB.
F (Hz) Le gain maximum dans la bande d'arrêt
Fp=300Hz; Gpmax=19,5dB
est : Gamax = -20dB.
La bande passante est définie pour :
F > Fp avec Fp = 300Hz.
La bande d'arrêt est définie pour :
F < Fa avec Fa = 50Hz.
Fa=50Hz; Gamax=-20dB
1-3-1. Pour la synthèse de filtre, il faut d'abord se reporter à un prototype de filtre passe bas normalisé.
Pour cela, on fixe les points de référence pour la normalisation : G0 et Fp, puis on effectue les
changements de variables suivants :
g 0 = G0 − G0 = 0dB g a = Ga max − G0 = −40dB g p = G p min − G0 = −0,5dB
Atténuation dans la bande d'arrêt : 40dB Atténuation dans la bande passante : 0,5dB
et comme on normalise en 1 1 F p 300
Conversion passe 1 fp = =1 fa = = = =6
f= même temps par rapport à Fp, Fp et Fa Fa 50
haut en passe bas F on obtient Fp Fp
Les valeurs de fp et fa, étant normalisées, elles sont sans dimension.
Sylvain LARRIBE Page 1/19 EXAM TAS_26-06-2004_corrige.doc (.PDF)
imprimé le 20/07/2004
CNAM de Saclay Corrigé de l'Examen : Traitement Analogique du Signal (2) 26 juin 2004
G
( )
g (dB)
fa = 6; g0 = 0dB G = 20 log(H ) = 10 log H 2
soit H 2 = 10 10
f
−0.5
H p2 = 10 10
= 10 −0,05 = 0,8912509
1
fp = 1; gp = -0,5dB = 10 0,05 = 1,122
H p2
−40
H a2 = 10 10 = 10 − 4 = 0,0001
fa = 6; ga = -40dB 1
= 10 4 = 10000
H a2
gabarit normalisé du filtre
Ne devant pas avoir d'ondulation dans la bande passante, les filtres de type Chebychev, elliptique ou
Cauer ne sont pas utilisables. Il reste les filtres de type Bessel ou Butterworth.
Comme il n'y a pas de contrainte sur la linéarité de la phase, on retient le filtre type de Butterworth car
pour le même gabarit, il nécessite un ordre moins élevé, donc moins de cellules en cascades.
1 1
L'ordre du filtre de type ln 2 − 1 − ln 2 − 1
H n=
( ) (
ln 10 0 , 05 − 1 − ln 10 4 − 1
= 3,15718
)
n= P HA
Butterworth est donné par 1
f 2 ln
2 ln P 6
fA
L'ordre d'un filtre correspond au nombre de pôles (~cellule du 1er ordre). Il s'agit d'un nombre entier, et
l'on retient toujours l'entier supérieur soit n = 4 .
1-3-2. On résout l'équation de Butterworth 2 1 pour obtenir f0, la fréquence à -3dB en fonction
H (f ) = 2× 4
f
1 +
f0
de H, f et n = 4. Ayant deux couples (Hp, fp) et (Ha, fa), on obtient deux valeurs f0p et f0a.
f fp 1 fa 6
f0 = f0p = = = 1,3008 f 0a = = = 1,8974
1 1 8
10 0 , 05
−1 1 8
10 4 − 1
2n −1 2×4 −1 2×4 −1
H2 H p2 H a2
Ces deux valeurs se situent aux limites inférieure et supérieure du gabarit normalisé.
Il est donc possible de choisir n'importe quelle fréquence entre f0p et f0a., mais l'on retient comme
fréquence f0, celle qui se situe au milieu de f0p et f0a (échelle logarithmique). Cela permet de rester à l'intérieur
du gabarit, même pour de petite variation de f0 due aux valeurs normalisées et aux tolérances des
composants.
La fréquence f0 est obtenue par la moyenne géométrique de f0p et f0a soit f 0 = f op × f oa = 1,5710
Le graphe ci-dessous montre que le gain de la fonction de transfert d'un filtre de Butterworth du
4ième ordre passe bien à l'intérieur du gabarit si la fréquence f0 est comprise entre f0p et f0a.
Sylvain LARRIBE Page 2/19 EXAM TAS_26-06-2004_corrige.doc (.PDF)
imprimé le 20/07/2004
CNAM de Saclay Corrigé de l'Examen : Traitement Analogique du Signal (2) 26 juin 2004
f0a
f0p
Pour revenir à la fréquence F0 du filtre passe haut, il faut faire la transformation inverse et dénormaliser :
1 300 F0 ≈ 191 Hz soit ω 0 ≈ 1200 rd/s
F0 = × Fp = = 190,961Hz
f0 1,5710
1-3-3. Le filtre étant du 4ième ordre, il est composé par la mise en cascade de 2 cellules du 2ième ordre. Le
polynôme normalisé du 4ième ordre de Butterworth est (1 + 0.7654 p + p 2 )(1 + 1.8478 p + p 2 )
Le graphe ci-dessous montre la réponse en fréquences du gain des 2 cellules du filtre de Butterworth, ainsi
que le gain total.
Pour obtenir la fonction de transfert complète du filtre passe haut, il faut faire les différents changements
de variables dont p = jω et ne pas oublier le gain de +20dB dans la bande passante.
ω0
ω
2
ω
2
Pour les filtres de Butterworth, toutes les
j j cellules ont la même pulsation ω0, par
H TOT ( jω ) = 10 × ω0 × ω0 contre le coefficient d'amortissement m est
2 2
ω ω ω ω différent pour chaque cellule.
1 + 2m1 j + j 1 + 2 m2 j + j
ω 0 ω 0 ω 0 ω 0
2m1 = 1,8478 soit m1 = 0,9239 et 2m 2 = 0,7654 soit m 2 = 0,3827
Sylvain LARRIBE Page 3/19 EXAM TAS_26-06-2004_corrige.doc (.PDF)
imprimé le 20/07/2004
CNAM de Saclay Corrigé de l'Examen : Traitement Analogique du Signal (2) 26 juin 2004
2 2
ω ω
− −
H TOT ( jω ) = 10 × 1200 × 1200
2 2
ω ω ω ω
1 + 1,8478 j − 1 + 0,7654 j −
1200 1200 1200 1200
1-3-4. Le graphe ci-dessous donne le module (en dB) des 2 cellules du 2ième ordre (S1 en Rouge et S2 en Bleu),
et celui du filtre complet en Vert.
La fonction de transfert du filtre complet est obtenue en faisant le produit des fonctions de transfert de chaque
cellule, mais on obtient le même résultat en faisant la somme des gains (en dB) de chaque cellule
20 log(H 0 × H 1 × H 2 ) = 20 log( H 0 ) + 20 log( H 1 ) + 20 log( H 2 ) .
Le graphe ci-dessous donne la phase (en degré) des 2 cellules du 2ième ordre (S1 en Rouge et S2 en Bleu), et
celui du filtre complet en Vert.
On retrouve bien que pour F0 (~191Hz), la phase est à la moitié de sa valeur, soit 180°.
Sylvain LARRIBE Page 4/19 EXAM TAS_26-06-2004_corrige.doc (.PDF)
imprimé le 20/07/2004
CNAM de Saclay Corrigé de l'Examen : Traitement Analogique du Signal (2) 26 juin 2004
1-3-5. Plusieurs structures sont possibles, mais les plus simples dans ce cas, sont celles de Rauch ou de Sallen
and Key. La structure à variable d'état ne présente pas beaucoup d'intérêt puisque l'on ne recherche qu'une
sortie passe haut, et la structure à contre réaction simple est plus difficile à synthétiser.
Filtre à contre réaction multiples : structure de Rauch :
2
ω
ω0
H = K0 × 2
ω ω
1 + 2mj −
ω 0 ω 0
R 2 R 5 C 1 C 3ω 2
H=
1 + jR 2 (C1 + C 3 + C 4 )ω − R 2 R5 C 3 C 4ω 2
C1
K0 = ω0 =
1 et m=
1
(C1 + C3 + C 4 ) R2
C4 R 2 R5 C 3 C 4 2 R5 C 3 C 4
2m C1 + C 3 + C 4
C1 = K 0 C 4 R2 = R5 =
(C1 + C3 + C4 )ω 0 2mC 3 C 4ω 0
Le gain de +20dB (amplification de 10) est à répartir entre les deux cellules. Il y a plusieurs solutions mais le
mieux dans ce cas est de le répartir de façon identique soit +10dB sur chacune des deux cellules.
Note :
Dans le cas du même filtre mais en passe bas, il serait plus intéressant de faire la répartition +13dB et +7dB, respectivement sur les
cellules avec les coefficients d'amortissements de 0,9239 et 0,3827.
Exemple d'application numérique :
Afin de limiter les références, on choisit les condensateurs dans les séries E6 (1 1,5 2,2 3,3 4,7 6,8).
Il faudrait faire l'étude de sensibilité afin de connaître l'impact de la tolérance de chaque composant sur le
respect du gabarit, mais bien qu'elle n'ait pas été faite, il faut limiter la tolérance des condensateurs à une
valeur plus faible que celle de la série standard E6 qui est de ±20%. L'exemple ci-dessous donne également
des valeurs normalisées dans la série E48 pour les résistances, tout en limitant leurs tolérances à ±1%.
Valeurs choisies Valeurs
Série Erreur min Erreur max
ou calculées normalisées
C1a 33 nF E6 à 2% 33 nF -2% +2%
R2a 20 264 Ω E48 à 1% 20,5 kΩ 0,15% 2,18%
1ère cellule C3a 33 nF E6 à 2% 33 nF -2% +2%
C4a 10 nF E6 à 2% 10 nF -2% +2%
m1 = 0,9239 R5a 103 878 Ω E48 à 1% 105 kΩ 0,07% 2,09%
Amplification : K C 33nF
01 = 1 = = 3,3
C 4 10 nF
C1b 100 nF E6 à 2% 100 nF -2% +2%
R2b 3 843 Ω E48 à 1% 3,83 kΩ -1,33% 0,66%
2ième cellule C3b 33 nF E6 à 2% 33 nF -2% +2%
C4b 33 nF E6 à 2% 33 nF -2% +2%
m2 = 0,3827 R5b 165 985 Ω E48 à 1% 169 kΩ 0,80% 2,83%
Amplification : K C 100 nF
02 = 1 = = 3,0303
C4 33nF
La mise en cascade des deux cellules a été choisie dans l'ordre décroissant des coefficients d'amortissement,
afin de garantir la plus grande dynamique du filtre.
Sylvain LARRIBE Page 5/19 EXAM TAS_26-06-2004_corrige.doc (.PDF)
imprimé le 20/07/2004
CNAM de Saclay Corrigé de l'Examen : Traitement Analogique du Signal (2) 26 juin 2004
Note :
• Les composants E1 et E2 de type ELAPLACE sont des sources de tension (Rs =0), contrôlée en tension (Re=∞), dont la fonction de
(OUT + ) − (OUT − )
transfert (IN + ) − (IN − ) est définie par une équation de Laplace (s ≡ jω). Ici, elles représentent un amplificateur opérationnel de
type passe bas du 1er ordre, dont le gain en boucle ouverte est de +100dB (100 000) et une fréquence de coupure à 10Hz.
• Les tolérances des composants sont renseignées à 1/3 de la tolérance des composants utilisés car les simulateurs spice comme
MicroSim ou OrCAD, associent la tolérance à une probabilité de 1σ, lors des analyses statistiques de type Monte-Carlo avec une
distribution gaussienne. Cette valeur (3σ) est plus réaliste de la dispersion réelle des composants, car elle permet d'avoir 99% des
composants, dont leur valeur est comprise dans la plage de tolérance.
Filtre à source de tension contrôlée : structure de Sallen and Key :
1 Z 2 = R2 1 Z 4 = R4
Z1 = Z3 =
jC1ω jC3ω
Ra
k =1+
Rb
− kR2 R4C1C3ω 2
H=
1 + j (R2C1 + R2C3 + R4C3 (1 − k ))ω − R2 R4C1C3ω 2
1 1 R 2 C1 + R 2 C 3 + R4 C 3 (1 − k )
K 0 = −k ω0 = m=
R 2 R 4 C1 C 3 2 R 2 R 4 C1 C 3
Cette solution est moins intéressante car la simplification habituelle qui consiste à prendre R 2 = R 4 et
C1 = C 3 ne permet pas de choisir le gain. Il est dans ce cas dépendant du facteur d'amortissement :
k = 3 − 2m .
Pour obtenir le gain souhaité de +20dB dans la bande passante, il faudrait alors ajouter un amplificateur
supplémentaire : k = 10
= 3,884 .
0
(3 − 2m1 )(3 − 2m 2 )
En reprenant les équations générales des paramètres de cette structure, il est néanmoins possible de répondre
au cahier des charges avec seulement les 2 structures du second ordre, mais les calculs des valeurs des
composants sont plus longs.
Une solution consiste par exemple à résoudre ces équations avec un solveur numérique, après avoir fixer
arbitrairement la valeur des condensateurs C1 et C3.
Exemple d'application numérique :
Il a été obtenu avec le solveur numérique disponible dans Excel.
Sylvain LARRIBE Page 6/19 EXAM TAS_26-06-2004_corrige.doc (.PDF)
imprimé le 20/07/2004
CNAM de Saclay Corrigé de l'Examen : Traitement Analogique du Signal (2) 26 juin 2004
Valeurs choisies Valeurs
Série Erreur min Erreur max
ou calculées normalisées
C1a 47 nF E6 à 2% 47 nF -2% +2%
R2a 21 006 Ω E48 à 1% 21,5 kΩ 1,31% 3,26%
C3a 100 nF E6 à 2% 100 nF -2% +2%
1ère cellule R4a 7 036 Ω E48 à 1% 7,15 kΩ 0,60% 2,57%
Raa 2,2 kΩ E48 à 1% 2,2 kΩ -1% +1%
m1 = 0,9239
Rba 1 kΩ E48 à 1% 1 kΩ -1% +1%
Amplification : K = 1 + R 2, 2 kΩ
01
aa
= = 3,2
Rba 1kΩ
C1b 47 nF E6 à 2% 47 nF -2% +2%
R2b 16 956 Ω E48 à 1% 16,9 kΩ -1,34% 0,66%
C3b 100 nF E6 à 2% 100 nF -2% +2%
2ième cellule R4b 8 716 Ω E48 à 1% 8,66 kΩ -1,67% 0,34%
Rab 10 kΩ E48 à 1% 10 kΩ -1% +1%
m2 = 0,3827
Rbb 4,7 kΩ E48 à 1% 4,7 kΩ -1% +1%
Amplification : K R 10 kΩ
02 = 1 + ab = = 3,1277
Rbb 4,7 kΩ
1-3-6. Calcul de l'impédance d'entrée des filtres :
Structure de Rauch :
La forme littérale de l'impédance d'entrée de la structure de Rauch est la suivante :
Z 2 Z3Z 4 .
Z e = Z1 +
Z2Z3 + Z2Z4 + Z2Z5 + Z3Z4
Dans le cas du filtre passe haut, elle s'écrit : Z e = 1 + R2
jC1ω 1 + jR2 (C 3 + C 4 )ω − R2 R5 C 3 C 4ω 2
Dans la bande passante (ω>ω0), l'impédance d'entrée tend vers zéro, comme ZC1.
Sylvain LARRIBE Page 7/19 EXAM TAS_26-06-2004_corrige.doc (.PDF)
imprimé le 20/07/2004
CNAM de Saclay Corrigé de l'Examen : Traitement Analogique du Signal (2) 26 juin 2004
Structure de Sallen and Key :
La forme littérale de l'impédance d'entrée de la structure de Sallen & Key est la suivante :
Z 2 (Z 3 + Z 4 ) .
Z e = Z1 +
Z 2 + Z 3 + Z 4 (1 − k )
Dans le cas du filtre passe haut, elle s'écrit : Z e = 1 + R2 (1 + jR4 C 3ω )
jC1ω 1 + j (R2 + R4 (1 − k ))C 3ω
Dans la bande passante (ω>ω0), l'impédance d'entrée tend vers :
R2 R4
Z e (ω >ω 0 ) =
R2 + R4 (1 − k )
mais pour les hautes fréquences (~1MHz), le gain k tendant vers zéro (l'amplificateur opérationnel est un
passe bas), l'impédance d'entrée du filtre tend alors vers :
R R
Z e (ω >>ω 0 ) = 2 4
R2 + R4
ω
j
1-4- Un filtre passe bande du deuxième ordre a la fonction de transfert suivante : ω0 .
H ( jω ) = 2
ω ω
+ j
1 + 2mj
ω 0 ω 0
1-4-1. m est le coefficient d'amortissement. Il définit le comportement du filtre, plus il est grand, et plus le
filtre est amorti. Ce comportement peut également être défini par son facteur de qualité (ou surtension)
1 à la place du coefficient d'amortissement m.
Q=
2m
Sylvain LARRIBE Page 8/19 EXAM TAS_26-06-2004_corrige.doc (.PDF)
imprimé le 20/07/2004
CNAM de Saclay Corrigé de l'Examen : Traitement Analogique du Signal (2) 26 juin 2004
• m ≥ 1, le dénominateur est décomposable en deux fonctions du 1er ordre.
ω
j
ω0 avec ω 0 = ω 01 × ω 02 et 2m = ω 01 + ω 02
H ( jω ) = ω0
ω ω
1 + j 1 + j
ω 01 ω 02
• m = 1, il s'agit d'un cas particulier du cas précédent., le dénominateur est le produit de deux fonctions
du 1er ordre identique.
ω
j
ω0
H ( jω ) = 2
ω
1 + j
ω0
• m < 1, le système n'est pas décomposable, et pour m < 1 ≈ 0,707 , la fonction de transfert présente
2
une surtension, d'autant plus importante et proche de ω 0 que m est petit.
• m = 0, le système est instable.
Le tableau ci-dessous donne quelques valeurs type du coefficient d'amortissement d'un filtre du 2ième ordre.
Chebychev
2 x RC Bessel Butterworth
0,5dB 1dB ≈1,25dB 2dB 3dB
√3/2 √2/2
m 1 0,5789 0,5227 0,5 0,443 0,3832
0,866 0,7071
1 1/√3 1/√2
Q= 0,5 0,8637 0,9565 1 1,1286 1,3047
2m 0,5774 0,7071
ω 0 = 2 × π × F0 est la pulsation propre .
Contrairement aux filtres du première ordre, cette pulsation ω 0 ne correspond pas à la pulsation de coupure
à -3 dB, sauf dans le cas d'un filtre de type Butterworth.
A la pulsation ω 0 , la rotation de la phase est égale à 50% de la rotation totale, soit 0° pour un filtre passe
bande du 2ième ordre.
1-4-2. Les graphes ci-dessous représentent les diagrammes asymptotiques du module (en dB) et de la phase d'un
filtre passe bande normalisée du deuxième ordre, ainsi que les diagrammes réels pour différentes valeurs du
coefficient d'amortissement (m).
Sylvain LARRIBE Page 9/19 EXAM TAS_26-06-2004_corrige.doc (.PDF)
imprimé le 20/07/2004
CNAM de Saclay Corrigé de l'Examen : Traitement Analogique du Signal (2) 26 juin 2004
Sylvain LARRIBE Page 10/19 EXAM TAS_26-06-2004_corrige.doc (.PDF)
imprimé le 20/07/2004
CNAM de Saclay Corrigé de l'Examen : Traitement Analogique du Signal (2) 26 juin 2004
Dans le cas d'un filtre
passe bande ou coupe
bande, la bande passante
ou la bande coupée
normalisée à -3dB est
définie par :
ω − ω ci
2m = cs
ω cs × ω ci
Ne pas confondre ωci et ωcs
pulsations de coupure à
-3dB avec ω01 et ω02
pulsations propres des
deux fonctions du 1er
ordre, sauf lorsque m>>1,
alors ω01 → ωci et
ω02 → ωcs.
1-4-3. voir ci-dessus les graphes du module (en dB) et la phase (en degrés) pour différentes valeurs de m (5, 2, 1,
0.707, 0.5, 0.2 et 0.1).
1 − jRCω
1-5- Soit le filtre défini par la fonction de transfert suivante : H ( jω ) =
1 + jRCω
Le module de H (ω ) est donné par H = ℜ N + ℑ N , et son argument par
2 2
1-5-1.
(ω )
ℜ 2D + ℑ2D
ℜN ℜ
ϕ (ω ) = arctan − arctan D , ce qui donne pour la fonction ci-dessus :
ℑN ℑD
H (ω ) = 1 et ϕ (ω ) = −2 arctan(RCω )
1
ω ω =0 ω = ω0 = ω → +∞
RC
H (ω ) 1 1 1
ϕ (ω ) 0° -90° -180°
Sylvain LARRIBE Page 11/19 EXAM TAS_26-06-2004_corrige.doc (.PDF)
imprimé le 20/07/2004
CNAM de Saclay Corrigé de l'Examen : Traitement Analogique du Signal (2) 26 juin 2004
1-5-2. Ce type de filtre s'appelle un filtre passe tout, ou déphaseur puisqu'il agit uniquement sur la phase du
signal.
1-5-3. Il permet de corriger la phase, ce qui peut être intéressant dans le cas un filtre ou un asservissement, afin
d'améliorer la réponse impulsionnelle, ou augmenter la marge de phase…
1-6- Les filtres de type Bessel présentent la particularité d'avoir la réponse en phase la plus linéaire dans la bande
passante , comparés aux filtres de type Butterworth, Chebychev ou elliptique.
Cet avantage est obtenu au détriment de la raideur dans la bande de transition (entre la bande passante et la bande
d'arrêt).
Ils sont appelés filtres à phase linéaire, ce qui signifie que toutes les composantes spectrales d'un signal sont
retardées du même temps. Ce temps est appelé temps de propagation tP (ou temps de groupe) et il est défini par :
dϕ .
tP =
dω
Le coefficient d'amortissement d'un filtre de Bessel est m = 3 ≈ 0,866
2
Les graphes ci-dessous montrent la différence de réponse fréquentielle, temps de propagation et la réponse
transitoire entre les différents types de filtres.
Sylvain LARRIBE Page 12/19 EXAM TAS_26-06-2004_corrige.doc (.PDF)
imprimé le 20/07/2004
CNAM de Saclay Corrigé de l'Examen : Traitement Analogique du Signal (2) 26 juin 2004
Le graphe ci-contre
est un agrandissement
de la réponse
transitoire à un
échelon.
Il permet de connaître
le dépassement
(overshoot) en
fonction du coefficient
d'amortissement.
Sylvain LARRIBE Page 13/19 EXAM TAS_26-06-2004_corrige.doc (.PDF)
imprimé le 20/07/2004
CNAM de Saclay Corrigé de l'Examen : Traitement Analogique du Signal (2) 26 juin 2004
2- Modulation
2-1- Si s(t) = S cos (ωt) est le signal modulant et p(t) = P cos (Ωt) la porteuse, le signal modulé en amplitude v(t) s'écrit :
cos(a + b ) + cos(a − b )
v (t ) = s (t ) × p (t ) = SP cos(ωt ) cos(Ωt ) et comme cos a cos b =
2
SP
On obtient : v(t ) = (cos((Ω − ω )t ) + cos((Ω + ω )t ))
2
Puisque s(t), et p(t) sont alternatifs (pas de composante continue), il n'y a pas de composante en Ω dans v(t), on dit
qu'il s'agit d'une modulation sans porteuse.
2-2- Représentation spectrale de s(t), de p(t) et de v(t) :
Signal
modulé
SP/2
Signal
S modulant Porteuse
P
pulsation
ω Ω−ω Ω Ω+ω
ci-dessous, exemple de représentation temporelle et fréquentielle d'un signal modulé en amplitude :
Sylvain LARRIBE Page 14/19 EXAM TAS_26-06-2004_corrige.doc (.PDF)
imprimé le 20/07/2004
CNAM de Saclay Corrigé de l'Examen : Traitement Analogique du Signal (2) 26 juin 2004
2-3- La forme générale d'un signal modulé en amplitude s'écrit : v (t ) = S (1 + k cos(ωt )) × P cos(Ωt ) , ou k est le taux de
modulation. v (t ) = S × P cos(Ωt ) + Sk × P cos((Ω − ω )t ) + Sk × P cos((Ω + ω )t )
2 2 2
Représentation spectrale de v(t) avec k=0.5 :
SP
Signal modulé
avec porteuse
Sk x P
2
pulsation
Ω−ω Ω Ω+ω
Ci-dessous, exemple de représentation temporelle et fréquentielle d'un signal modulé en amplitude avec un taux
de 50% :
Sylvain LARRIBE Page 15/19 EXAM TAS_26-06-2004_corrige.doc (.PDF)
imprimé le 20/07/2004
CNAM de Saclay Corrigé de l'Examen : Traitement Analogique du Signal (2) 26 juin 2004
2-4- En France, les radios émettant en modulation d'amplitude dans la bande des grandes ondes (GO), se répartissent
les fréquences de la façon suivante :
bande latérale inférieure
porteuse
bande latérale supérieure
162kHz 183kHz 198kHz 216kHz 234kHz
BBC
RMC
France Inter
Europe 1
RTL
Sylvain LARRIBE Page 16/19 EXAM TAS_26-06-2004_corrige.doc (.PDF)
imprimé le 20/07/2004
CNAM de Saclay Corrigé de l'Examen : Traitement Analogique du Signal (2) 26 juin 2004
En modulation d'amplitude, la bande passante du signal modulé est égale à deux fois la bande passante de la bande
de base (signal modulant), et elle est centrée sur la fréquence de la porteuse.
Pour connaître la bande passante audio disponible pour chaque radio (valeur maximale théorique), il faut trouver
la bande passante maximale disponible pour le signal modulé. La fréquence attachée à chaque radio, est la
fréquence de la porteuse.
Nom de la station France inter Europe 1 BBC RMC RTL
Fréquence de la
162kHz 183kHz 198kHz 216kHz 234kHz
porteuse
Delta de fréquence
21kHz 15kHz 18kHz 18kHz
entre les porteuses
Hormis entre la BBC et Europe1, il y a au minimum 18kHz entre les porteuses de deux radios côte à côte. Ceci
offre en théorie une bande passante de 9kHz pour le signal audio .
Sylvain LARRIBE Page 17/19 EXAM TAS_26-06-2004_corrige.doc (.PDF)
imprimé le 20/07/2004
CNAM de Saclay Corrigé de l'Examen : Traitement Analogique du Signal (2) 26 juin 2004
3- Conversion
3-1- Lors de l'échantillonnage d'un signal, il faut respecter le critère de Nyquist (ou théorème de Shannon).
3-1-1. Le critère de Nyquist dit que la fréquence d'échantillonnage (Fe) d'un signal doit être strictement
supérieure au double de la fréquence la plus élevée (Fmax) du signal à échantillonner, afin de pouvoir le
reconstituer. Fe > 2 x Fmax .
3-1-2. Si ce critère n'est pas respecter, il devient impossible de reconstituer le signal d'origine, car il y a un
repliement du spectre.
si Fmax > Fe/2 alors (Fe - Fmax) < Fe/2
L'échantillonnage d'un signal est le produit de ce signal par un peigne de dirac (signal d'échantillonnage), ce
qui revient à faire une modulation d'amplitude.
Il y a deux approches possibles pour résoudre les problèmes dus au repliement de spectre :
• Soit les signaux, dont les fréquences sont au-dessus de la fréquence de Nyquist (Fe/2), sont des signaux
indésirables, et dans ce cas, on peut les supprimer avant échantillonnage par filtrage, afin de ne pas les
retrouver mélangés au signal utile.
Raison pour laquelle on trouve un filtre en entrée des convertisseurs analogiques-numériques (CAN). La
plage de fréquence située entre Fmax et Fe/2 correspond à la bande de transition du filtre anti-repliement.
Plus cette plage est faible, et plus, il faut un filtre d'ordre élevé.
• Soit les signaux, dont les fréquences sont au-dessus de la fréquence de Nyquist (Fe/2), sont des signaux
utiles, et dans ce cas, il faut augmenter la fréquence d'échantillonnage.
L'évolution de l'intégration électronique et l'augmentation des fréquences de fonctionnement des systèmes
numériques permettent de faire des convertisseurs A/N plus rapides et de pouvoir intégrer des filtres
numériques. Le filtre analogique en entrée du convertisseur est toujours indispensable, mais il peut être d'un
ordre et d'une complexité bien plus faible. C'est le cas par exemple avec les convertisseurs A/N de type Σ∆.
3-2- Convertisseur Flash (parallèle).
3-2-1. Structure interne d'un convertisseur Flash de 3 bits.
Sylvain LARRIBE Page 18/19 EXAM TAS_26-06-2004_corrige.doc (.PDF)
imprimé le 20/07/2004
CNAM de Saclay Corrigé de l'Examen : Traitement Analogique du Signal (2) 26 juin 2004
L'encodeur a la table de vérité suivante :
entrées sorties
7 6 5 4 3 2 1 C B A
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 1 0 0 1
0 0 0 0 0 1 1 0 1 0
0 0 0 0 1 1 1 0 1 1
0 0 0 1 1 1 1 1 0 0
0 0 1 1 1 1 1 1 0 1
0 1 1 1 1 1 1 1 1 0
1 1 1 1 1 1 1 1 1 1
Exemple de référence : 74HC148 (8 to 3 Line Priority Encoder).
Le registre de sortie est constitué de 3 bascules, qui mémorisent l'état des 3 bits A, B, C sur un front du signal
Clk.
Exemples de références : 74HC175 (Quad D-type flip-flop with reset;s positive-edge trigger) sans sortie
trois états, ou 74HC574 (Octal edge-triggered D-type flip-flops with 3-state outputs)
3-2-2. Avantages et inconvénients des convertisseurs Flash.
- principe simple.
- convertisseur très rapide car la décision des 2n niveaux sont prises en même temps.
- ne nécessite pas d'échantillonneur bloqueur en entrée.
- nécessite une échelle de 2n-1 références de tension et autant de comparateurs.
- limité à des convertisseurs 8 ou 10 bits pour des raisons de précision et de coût.
- consommation électrique importante.
- surface de silicium importante.
- prix important.
3-3- Si l'on ne tient compte que de l'erreur de quantification d'un convertisseur analogique numérique, un convertisseur
10 bits a un rapport signal à bruit de 61,96 dB
SNR = (6,02n + 1,76) dB
Sylvain LARRIBE Page 19/19 EXAM TAS_26-06-2004_corrige.doc (.PDF)
imprimé le 20/07/2004
Durée : 2 heures CNAM, le 26 juin 2004
Examen : Traitement Analogique du Signal (2)
Sans documents, calculatrice autorisée.
Les questions 1, 2 et 3 sont indépendantes.
1- Filtrage analogique
1-1- Donner la fonction de transfert d'un filtre passe bas du second ordre, dont le gain est de +20 dB dans la bande
passante: H ( jω ) = ?
1-2- Quel changement de variable doit-on effectuer pour convertir la fonction de transfert d'un filtre passe bas du
second ordre, en un filtre passe haut du second ordre ?
1-3- Réaliser un filtre passe haut répondant au cahier des charges suivant :
• pas d'ondulation dans la bande passante.
50Hz; 20dB
G (dB)
F (Hz)
300Hz; 19,5dB
50Hz; -20dB
1-3-1. Calculer l'ordre du filtre : n = ?
1-3-2. Calculer la fréquence de coupure de ce filtre et justifier votre choix.
1-3-3. Ecrire la fonction de transfert complète de ce filtre passe haut : H TOT ( jω ) = ?
1-3-4. Tracer sur le même graphe (4dB/cm, 1 décade/5cm) : le gabarit donné dans le cahier des charges, l'allure du
module de chaque cellule du filtre, et l'allure du module du filtre complet H TOT ( jω )
1-3-5. Choisir une structure de filtre actif, puis calculer les valeurs des composants (les condensateurs seront
choisis dans la série E6)
1-3-6. Calculer l'impédance d'entrée du filtre.
ω
j
1-4- Un filtre passe bande du deuxième ordre a la fonction de transfert suivante : ω0 .
H ( jω ) = 2
ω ω
1 + 2mj + j
ω 0 ω 0
1-4-1. Comment appelle-t-on m et ω0 ?
1-4-2. Tracer les diagrammes asymptotiques du module et de l'argument.
1-4-3. Tracer sur le graphe précédant, l'allure du module pour 3 ou 4 valeurs de m judicieusement choisies,
permettant d'illustrer les possibilités offertes par m.
1 − jRCω
1-5- Soit le filtre défini par la fonction de transfert suivante : H ( jω ) =
1 + jRCω
1-5-1. Calculer son module H (ω ) = ? et son argument ϕ (ω ) = ?
1-5-2. Comment appelle-t-on ce type de filtre ?
1-5-3. A quoi peut-il servir ?
1-6- Quel est la particularité d'un filtre de type Bessel ?
Page 1/7 EXAM TAS_26-06-2004.doc (.PDF)
Durée : 2 heures CNAM, le 26 juin 2004
Examen : Traitement Analogique du Signal (2)
Sans documents, calculatrice autorisée.
2- Modulation
2-1- Donner l'expression du signal modulé en amplitude v(t) = ?
avec pour signal modulant s(t) = S cos (ωt) et comme porteuse p(t) = P cos (Ωt)
2-2- Représenter le spectre de v(t) (noter les valeurs importantes)
2-3- Faites la/les modification(s) nécessaire(s) de s(t) et/ou p(t) afin d'obtenir un signal en bande étroite avec un taux de
modulation de 50%. Représenter le spectre de v(t)
2-4- En France, les radios émettant en modulation d'amplitude dans la bande des grandes ondes (GO), se répartissent
France Inter
Europe 1
RMC
RTL
f
162 kHz 182 kHz 216 kHz 234 kHz
les fréquences de la façon suivante :
Que peut-on en déduire, quant à la bande passante maximale du signal audio pour chacune des stations, et
pourquoi ?
3- Conversion
3-1- Lors de l'échantillonnage d'un signal, il faut respecter le critère de Nyquist (ou théorème de Shannon).
3-1-1. Que dit-il ? Pourquoi ?
3-1-2. Que se passe-t-il si ce critère n'est pas respecté ? Que peut-on faire pour le respecter ?
3-2- Convertisseur Flash (parallèle).
3-2-1. Dessiner et commenter la structure interne d'un convertisseur Flash unipolaire de 3 bits.
3-2-2. Donner ses avantages est ses inconvénients.
3-3- Si l'on ne tient compte que de l'erreur de quantification d'un convertisseur analogique numérique, quel est le
rapport signal sur bruit obtenu par un convertisseur 10 bits ?
Page 2/7 EXAM TAS_26-06-2004.doc (.PDF)
Durée : 2 heures CNAM, le 26 juin 2004
Examen : Traitement Analogique du Signal (2)
Sans documents, calculatrice autorisée.
Annexes
Filtre de type Butterworth :
2 1 1 1
H (ω ) = 2n ln 2 − 1 − ln 2 − 1
ω H HA le polynôme du 4ème ordre est :
1 + n= P
ω0 ωP (1 + 0.7654 p + p 2 )(1 + 1.8478 p + p 2 )
2 ln
ωA
Filtre de type Chebytchev :
2 1 ω ≤ 1 Tn (ω ) = cos(n arccos(ω )) arccos h (Tn (ω ) )
H (ω ) = n=
1 + ε 2Tn (ω ) ω > 1 Tn (ω ) = cosh (n arccos h (ω )) arccos h (ω )
le polynôme du 3ème ordre est : T3(ω ) = 4ω 3 − 3ω
Filtre à contre réaction multiples : structure de Rauch
Z1= 1 Z2 = 1 Z3 = 1 Z4 = 1 Z5 = 1
Y1 Y2 Y3 Y4 Y5
Vs − Y1Y3
H= =
Ve Y1Y5 + Y2Y5 + Y3Y4 + Y3Y5 + Y4Y5
Passe bas :
Z1= R1 Z2 = 1 Z3 = R3 Z4 =R4 Z5 = 1
jC2ω jC5ω
− R4 1 et 1 1 1 1 C
K0 = ω0 = m= + + R3 R 4 5
R1 R3 R 4 C 2 C 5 2 R1 R3 R 4 C2
Passe haut :
1 Z 2 = R2 Z = 1 1
Z1 = Z4 =
jC1ω jC3ω jC4ω
3
Z 5 = R5
C1
K0 = ω0 =
1 et m=
1
(C1 + C3 + C 4 ) R2
C4 R 2 R5 C 3 C 4 2 R5 C 3 C 4
Page 3/7 EXAM TAS_26-06-2004.doc (.PDF)
Durée : 2 heures CNAM, le 26 juin 2004
Examen : Traitement Analogique du Signal (2)
Sans documents, calculatrice autorisée.
Passe bande :
• Configuration a :
Z1 = R1 Z 2 = R2 ou 1 1 1
Z3 = Z4 =
jC 2ω jC 3ω jC 4ω
Z 5 = R5
Z 2 = R2 R1 + R2 C3 + C 4 R1 R2 R 2 R5 C 3
ω0 = m= K0 = −
R1 R2 R5 C 3 C 4 2 ( R1 + R2 ) R5C3C4 ( R1 + R 2 ) R1C 4
1 1 C 2 + C3 + C 4 R1 R5 C 3
Z2 = ω0 = m= K0 = −
jC 2ω R1 R5 C 3 C 4 2 R5 C 3 C 4 R1C 4
Z 2 : non câblée 1 C3 + C4 R1 R5C3
ω0 = m= K0 = −
R1 R5 C 3 C 4 2 R5C3C4 R1C 4
• Configuration b :
1 Z 2 = R2 ou 1 Z 3 = R3 Z 4 = R 4
Z1 =
jC1ω jC 2ω
1
Z5 =
jC5ω
Z 2 = R2 1 1 1 1 1 C R4 C1
ω0 = m= + + R3 R 4 5 K0 = −
R3 R4 C1C 5 2 R 2 R3 R 4 C1 R3 C 5
1 1 1 1 1 C5 R4
Z2 = ω0 = m= + R3 R4 K0 = − × C1
jC 2ω R3 R4 (C1 + C 2 )C 5 2 R3 R4 (C1 + C 2 ) R3 (C1 + C 2 )C 5
Z 2 : non câblée 1 1 1 1 C R4 C1
ω0 = m= + R3 R 4 5 K0 = −
R3 R4 C1C 5 2 R3 R 4 C1 R3 C 5
Page 4/7 EXAM TAS_26-06-2004.doc (.PDF)
Durée : 2 heures CNAM, le 26 juin 2004
Examen : Traitement Analogique du Signal (2)
Sans documents, calculatrice autorisée.
Filtre à contre réaction simple
I1a =Y11a ⋅V1a +Y12a ⋅V2a I1b =Y11b ⋅V1b +Y12b ⋅V2b
Les quadripôles Qa et Qb donnent et que l’on peut simplifier car
I 2a =Y21a ⋅V1a +Y22a ⋅V2a I 2b =Y21b ⋅V1b +Y22b ⋅V2b
I 2a =−I1b V1a =Ve
et et l’on obtient Y21a ⋅Ve=−Y12b ⋅Vs soit H = Vs = − Y21a
V2a =V1b =−ε =0 V2b =Vs Ve Y12b
Généralisation :
Il est facile de généraliser car les admittances
en parallèles s’additionnent.
∑Y 21ai
H = − i =1
n
∑Y
j =1
12 bj
1
Y21 = − Y21 = − jCω
R
jCω 1 + jRCω
Y21 = − Y21 = −
1 + jRCω R
1
Y21 = − jCω jRCω
RCω Y21 = − ×
2 R1 + j 2 1 + 2 jRCω
2
Page 5/7 EXAM TAS_26-06-2004.doc (.PDF)
Durée : 2 heures CNAM, le 26 juin 2004
Examen : Traitement Analogique du Signal (2)
Sans documents, calculatrice autorisée.
Filtre à source de tension contrôlée : structure de Sallen and Key
Vs kZ 2 Z 4
H= =
Ve Z1 Z 4 (1 − k ) + Z1 (Z 2 + Z 3 ) + Z 2 (Z 3 + Z 4 )
Ra + Rb
avec k =
Rb
Passe bas :
Z1= R1 Z2 = 1 Z3 = R3 1
Z4 =
jC2ω jC 4ω
K0 = k 1 et 1 R1C 2 (1 − k ) + R1C 4 + R3 C 4
ω0 = m=
R1 R3 C 2 C 4 2 R1 R3 C 2 C 4
Passe haut :
1 Z 2 = R2 Z = 1 Z 4 = R4
Z1 =
jC1ω jC3ω
3
K 0 = −k 1 et 1 R 2 C1 + R 2 C 3 + R4 C 3 (1 − k )
ω0 = m=
R 2 R 4 C1 C 3 2 R 2 R 4 C1 C 3
Passe bande :
Z 1 = R1 Z 2 = R2 1 R4
Z3 = Z4 =
jC3ω 1 + jR 4 C 4 ω
ω
j
ω0
H = K0 × 2
ω ω
1 + 2mj −
ω 0 ω 0
R 2 R 4 C 3ω Par identification, on obtient :
k× j
R1 + R 2 R2 R4 C 3 R1 + R 2
H= K0 = k ω0 =
R R C (2 − k ) + R 2 (R 4 C 4 + R 4 C 3 + R1C 3 )
1 + j 1 4 4
R R R C C ω2
ω − 1 2 4 3 4
(R1 + R2 )R1C 4 R1 R 2 R 4 C 3 C 4
R1 + R 2 R1 + R2
et m = R1 R 4 C 4 (2 − k ) + R2 (R 4 C 4 + R 4 C 3 + R1C 3 )
2× (R1 + R2 )R1 R2 R4 C 3 C 4
Page 6/7 EXAM TAS_26-06-2004.doc (.PDF)
Durée : 2 heures CNAM, le 26 juin 2004
Examen : Traitement Analogique du Signal (2)
Sans documents, calculatrice autorisée.
Filtre à variable d’état : filtres universels
Il est basé sur l’utilisation d’intégrateurs et de sommateurs. Il présente la particularité de fournir en même temps une sortie
passe bas, une sortie passe haut et une sortie passe bande.
V1 = Ve − V2 − V3
-
Ve
+
V1
∫τ V2
∫τ V3
V2 =
1
V1 V3 =
1
V2
1 2
- τ1 p τ2 p
Sortie en V1 : Sortie en V2 : Sortie en V3 :
filtre passe haut filtre passe bande filtre passe bas
V1 V2 V3
V4
2 R4 2 R3 −1 −1 R3
V1 = Ve + V2 − V3 V2 = V1 V3 = V2 V4 = −Ve − V2
R3 + R4 R3 + R4 jR1C1ω jR2 C 2ω R4
Passe haut : Vphaut = V1
− 2 R4 1 et R3 R2 C 2
K0 = ω0 = m=
R3 + R 4 R1 R 2 C1C 2 R3 + R 4 R1C1
Passe bande : Vpbande = V2
− R4 1 et R3 R2 C 2
K0 = ω0 = m=
R3 R1 R 2 C1C 2 R3 + R 4 R1C1
Passe bas : Vpbas = V3
2 R4 1 et R3 R2 C 2
K0 = ω0 = m=
R3 + R 4 R1 R 2 C1C 2 R3 + R 4 R1C1
Coupe bande : Vcoupe bande = V4
K0 =1 1 et R3 R2 C 2
ω0 = m=
R1 R 2 C1C 2 R3 + R 4 R1C1
Page 7/7 EXAM TAS_26-06-2004.doc (.PDF)
Vous aimerez peut-être aussi
- Filtres Du Second OrdreDocument4 pagesFiltres Du Second OrdreEmmanuel AkedPas encore d'évaluation
- BodeDocument28 pagesBodeVictor GuérinPas encore d'évaluation
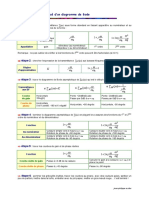
- TP E6 Cascade-FiltreDocument3 pagesTP E6 Cascade-Filtrebouchra erramliPas encore d'évaluation
- Guide Pour Le Tracé D'un Diagramme de Bode: Étape 1Document1 pageGuide Pour Le Tracé D'un Diagramme de Bode: Étape 1Chrif ÀyOùbPas encore d'évaluation
- Docs E7 FiltrageDocument2 pagesDocs E7 FiltrageMohamed Aly Sow100% (1)
- Séance 6Document5 pagesSéance 6YonnePas encore d'évaluation
- Automatique 1 - 20172018 - ZLI - 6Document39 pagesAutomatique 1 - 20172018 - ZLI - 6MOUMMOUPas encore d'évaluation
- 32-103 Éléctrocinétique Filtre BilanDocument4 pages32-103 Éléctrocinétique Filtre BilanMohamed Ait KaddourPas encore d'évaluation
- DM1 - Rappels - Thermo - CorrectionDocument4 pagesDM1 - Rappels - Thermo - CorrectionMariem JlassiPas encore d'évaluation
- (E5) TD CorrectionDocument12 pages(E5) TD Correctionchkwh99sk8Pas encore d'évaluation
- Multisim: Pr. E.M. Skouri 1Document2 pagesMultisim: Pr. E.M. Skouri 1Mohamed ZnbPas encore d'évaluation
- Les Filtres PassifsDocument12 pagesLes Filtres PassifsAymen KtataPas encore d'évaluation
- Fiche Cours BodeDocument4 pagesFiche Cours BodeJean-Pierre AwuPas encore d'évaluation
- Filtres ActifsDocument38 pagesFiltres ActifsAnonymous NcBTlaelPas encore d'évaluation
- TD11 FiltrageDocument3 pagesTD11 Filtrageدروسي50% (2)
- Rattrapage L3 Fcts Electroniques 2020Document5 pagesRattrapage L3 Fcts Electroniques 2020Idir AmeurPas encore d'évaluation
- Electronique - Analogique SMP5Document41 pagesElectronique - Analogique SMP5Adham Chtioui100% (4)
- II Filtre D'ordre 1Document5 pagesII Filtre D'ordre 1zied houanebPas encore d'évaluation
- Revisions Sur Les Filtres CorrigeDocument2 pagesRevisions Sur Les Filtres CorrigeAmine El messrarPas encore d'évaluation
- Seride de TD N 1 - SolutionsDocument8 pagesSeride de TD N 1 - SolutionsMounir KhPas encore d'évaluation
- TDelec6 2008-2009 PDFDocument5 pagesTDelec6 2008-2009 PDFbadrePas encore d'évaluation
- Filtres 2 EmeordreDocument4 pagesFiltres 2 EmeordreSissi DadiPas encore d'évaluation
- Tome - 3 - Linéaire Tle - F2Document72 pagesTome - 3 - Linéaire Tle - F2Thierry roland Um100% (1)
- TD E7 Filtrage PDFDocument17 pagesTD E7 Filtrage PDFJoseph OnguenePas encore d'évaluation
- Chapitre Filtres Actifs 21 22Document35 pagesChapitre Filtres Actifs 21 22AminePas encore d'évaluation
- ds1 Elec CDocument7 pagesds1 Elec CMohamed HANINIPas encore d'évaluation
- TD9 Filtre Lineaire CorrectionDocument7 pagesTD9 Filtre Lineaire Correctioncapelletimothee1Pas encore d'évaluation
- Etude Des Filtres PassifsDocument11 pagesEtude Des Filtres PassifsyessinePas encore d'évaluation
- TD FiltresDocument17 pagesTD FiltreselbiyatimanalPas encore d'évaluation
- DM nc2b06 Decc81lectroniqueDocument2 pagesDM nc2b06 Decc81lectroniqueabdrahim benaliPas encore d'évaluation
- TP Capteur Acceleration & DeplacementDocument9 pagesTP Capteur Acceleration & Deplacementcopch2020Pas encore d'évaluation
- CEM Diagramme de BodeDocument6 pagesCEM Diagramme de BodeMohamed SbaPas encore d'évaluation
- Cours D'électronique - 3Document12 pagesCours D'électronique - 3Boubacar TomotaPas encore d'évaluation
- P2-2-Filtres LineairesDocument21 pagesP2-2-Filtres LineairesAngus MakPas encore d'évaluation
- TP CircuitDocument10 pagesTP CircuitAsmae ElPas encore d'évaluation
- TP 2 Partie ELN Circuit RCDocument8 pagesTP 2 Partie ELN Circuit RCdeltahamza31Pas encore d'évaluation
- Filtrage AnalogiqueDocument47 pagesFiltrage AnalogiqueFranck LecocqPas encore d'évaluation
- MPSI 23/24 P-I-5-E Filtres Lineaires: AutocontroleDocument11 pagesMPSI 23/24 P-I-5-E Filtres Lineaires: Autocontroleluc couraudPas encore d'évaluation
- TP16Document4 pagesTP16Anais DjadelPas encore d'évaluation
- Seride de TD N 1Document4 pagesSeride de TD N 1Mounir KhPas encore d'évaluation
- Corr Exos Ean2 FiltresDocument16 pagesCorr Exos Ean2 FiltresYoussef SadikPas encore d'évaluation
- Serie 1 SMP5 (2020-2021)Document3 pagesSerie 1 SMP5 (2020-2021)mohamed100% (1)
- TP 3 de VOMDocument9 pagesTP 3 de VOMMohamed BougoffaPas encore d'évaluation
- Filtre WienDocument2 pagesFiltre WienALaa MoriartyPas encore d'évaluation
- SystemesDocument5 pagesSystemesAmina AminaPas encore d'évaluation
- TD Latex2Document2 pagesTD Latex2redouan hamidatPas encore d'évaluation
- TP1 Manip - Filtres LED SIIDocument12 pagesTP1 Manip - Filtres LED SIIMoussa ESSANHAJIPas encore d'évaluation
- Aucune Sortie Définitive N'est Autorisée Avant 12hDocument11 pagesAucune Sortie Définitive N'est Autorisée Avant 12hsenhaji allalPas encore d'évaluation
- Chap 5Document54 pagesChap 5Fatima zahra BarajPas encore d'évaluation
- Révision CPLT Elec Juillet 2015Document5 pagesRévision CPLT Elec Juillet 2015DominoHevyPas encore d'évaluation
- Chapitre 7 Reponse Harmonique SystemesDocument8 pagesChapitre 7 Reponse Harmonique SystemesmounaPas encore d'évaluation
- ELCIN - 05 Filtre de Rauch Passe BandeDocument5 pagesELCIN - 05 Filtre de Rauch Passe BandeMohamed ElankoudPas encore d'évaluation
- Chapitre 2Document76 pagesChapitre 2salaheddinesabir76Pas encore d'évaluation
- Con SI ENSA ASFI 2012Document2 pagesCon SI ENSA ASFI 2012سفيان مقدادPas encore d'évaluation
- DS 6Document4 pagesDS 6Hanaa DaoudiPas encore d'évaluation
- Td104analyse Fourier CorrigeDocument1 pageTd104analyse Fourier CorrigeThomasPas encore d'évaluation
- Partiel 1Document4 pagesPartiel 1phollaPas encore d'évaluation
- Ampli ACCORDEDocument10 pagesAmpli ACCORDEMaria MEKLI100% (1)
- Devoir Maison Electronique MPDocument4 pagesDevoir Maison Electronique MPOMVR25Pas encore d'évaluation
- PrésentROBOTIQUEDocument88 pagesPrésentROBOTIQUEel bekkary HajarPas encore d'évaluation
- Project ISISDocument22 pagesProject ISISel bekkary HajarPas encore d'évaluation
- Méthode Des 5 Pourquoi Et 5SDocument31 pagesMéthode Des 5 Pourquoi Et 5Sel bekkary HajarPas encore d'évaluation
- 9 1 TD 1 Sujet HydrauliqueDocument3 pages9 1 TD 1 Sujet HydrauliqueLarbi Elbakkali50% (2)
- TD Automatiq Master Meca1Document4 pagesTD Automatiq Master Meca1el bekkary HajarPas encore d'évaluation
- TD Automatiq Master Meca1Document4 pagesTD Automatiq Master Meca1el bekkary HajarPas encore d'évaluation
- Présenté Par:: Mr. Mazoughou GOEPOGUIDocument161 pagesPrésenté Par:: Mr. Mazoughou GOEPOGUITojonirina Jacky RAKOTOMANANAPas encore d'évaluation
- 2015 09 01 GELE2112 Chapitre4Document35 pages2015 09 01 GELE2112 Chapitre4Gho FranPas encore d'évaluation
- Circuit ProgramableDocument129 pagesCircuit ProgramablesihemfarahPas encore d'évaluation
- Chapitre 6 Registre Et CompteursDocument14 pagesChapitre 6 Registre Et CompteursAbdelkerim LemaadiPas encore d'évaluation
- Enonce Ampli 2Document8 pagesEnonce Ampli 2medPas encore d'évaluation
- Schema Montage AOPDocument8 pagesSchema Montage AOPSimoBal-ghaouiPas encore d'évaluation
- Correction 1Document12 pagesCorrection 1Kaoutar SalamPas encore d'évaluation
- Chapitre 7 Amplificateur SelectifDocument5 pagesChapitre 7 Amplificateur SelectifMc R-One100% (1)
- Les Filtres AnalogiquesDocument16 pagesLes Filtres AnalogiquesWalid HajiiPas encore d'évaluation
- AS2 MicroProcComponents CorrectionDocument5 pagesAS2 MicroProcComponents CorrectionLafandi /لفنديPas encore d'évaluation
- Cours Elec Analog 1Document40 pagesCours Elec Analog 1578qgkpgs2Pas encore d'évaluation
- Annexe5-AMPLIFICATEUR OPÉRATIONNEL RÉELDocument3 pagesAnnexe5-AMPLIFICATEUR OPÉRATIONNEL RÉELAla Eddine LarGatPas encore d'évaluation
- CH 2 RESET Et Système Dhorloge RCCDocument52 pagesCH 2 RESET Et Système Dhorloge RCCCode CodeurPas encore d'évaluation
- Série D'exercices - Physique - Multivibrateur ASTABLE - Bac Informatique (2018-2019) MR Daghsni SahbiDocument6 pagesSérie D'exercices - Physique - Multivibrateur ASTABLE - Bac Informatique (2018-2019) MR Daghsni SahbiAmal LaadhariPas encore d'évaluation
- Partie2 - Carte Esp32 - Presentation - EleveDocument2 pagesPartie2 - Carte Esp32 - Presentation - EleveSami Smout50% (2)
- Devoir de Contrôle N°1 - Génie Électrique Distributeur de Boisson Chaude - Bac Technique (2011-2012) MR Ben JaballahDocument5 pagesDevoir de Contrôle N°1 - Génie Électrique Distributeur de Boisson Chaude - Bac Technique (2011-2012) MR Ben JaballahHichem Hamdi67% (3)
- F11.conception Phase de SynthèseDocument14 pagesF11.conception Phase de SynthèseHouda ElghazouaniPas encore d'évaluation
- Chap4 Millman 2022Document33 pagesChap4 Millman 2022ridaz2014Pas encore d'évaluation
- TdtotalDocument20 pagesTdtotalDocta Ndolo Jr.Pas encore d'évaluation
- Rapport Examples VHDLDocument30 pagesRapport Examples VHDLYacinePas encore d'évaluation
- Ampli TransistorDocument6 pagesAmpli Transistorchaima2003poshPas encore d'évaluation
- Cours Num1Document53 pagesCours Num1Maxence KouessiPas encore d'évaluation
- Logique SéquentielleDocument6 pagesLogique SéquentielleAhmed HabboutiPas encore d'évaluation
- Oscillateurs Chap 3Document38 pagesOscillateurs Chap 3Hafsa HakimPas encore d'évaluation
- Circuits Logiques Programmables-FinalDocument145 pagesCircuits Logiques Programmables-FinalHoucem B HsnPas encore d'évaluation
- Série 3 TD EANDocument3 pagesSérie 3 TD EANHenAbdoPas encore d'évaluation
- TD Fpga Cs 2015Document5 pagesTD Fpga Cs 2015hakim100% (1)
- TD 2Document4 pagesTD 2Marouan ZahriPas encore d'évaluation
- FR - Sinbosenaudio - Com - Sinbosen 4 Channel 450w k4 450 Digital Amplifier 1u Home Audio Power Amplifier p00238p1 - HTMLDocument9 pagesFR - Sinbosenaudio - Com - Sinbosen 4 Channel 450w k4 450 Digital Amplifier 1u Home Audio Power Amplifier p00238p1 - HTMLcidessPas encore d'évaluation
- Circuit Specialise NE555Document7 pagesCircuit Specialise NE555Toàn Dương LêPas encore d'évaluation