Vous aimerez peut-être aussi
- S6 Chapitre 6 Oscillations MecaniquesDocument12 pagesS6 Chapitre 6 Oscillations MecaniquesDabo100% (1)
- S07 Oscillateurs AmortisDocument42 pagesS07 Oscillateurs AmortisSohaib LaminePas encore d'évaluation
- Physique Des Ondes II - 2A - Poly - 2022 2023Document48 pagesPhysique Des Ondes II - 2A - Poly - 2022 2023Tadessé NicolyPas encore d'évaluation
- C4 TD Oscillations Mecaniques 1Document3 pagesC4 TD Oscillations Mecaniques 1moryammossati92Pas encore d'évaluation
- Ondes Et Vibrations: IUT, Année 2008-09Document16 pagesOndes Et Vibrations: IUT, Année 2008-09Armand StevenskiPas encore d'évaluation
- L05 PHR004 2010 PDFDocument22 pagesL05 PHR004 2010 PDFMarwane OuadadPas encore d'évaluation
- Cours Vibration2020Document14 pagesCours Vibration2020Mohammed TlmPas encore d'évaluation
- td2 VibraDocument5 pagestd2 VibraAilton muhanchePas encore d'évaluation
- C_EC_03.5Document8 pagesC_EC_03.5fangatauPas encore d'évaluation
- Ondes Et Vibrations - Chap - 01 PDFDocument40 pagesOndes Et Vibrations - Chap - 01 PDFBoudjema SoudedPas encore d'évaluation
- La Dynamique Du Mouvement Harmonique SimpleDocument8 pagesLa Dynamique Du Mouvement Harmonique Simplecoucou garbiPas encore d'évaluation
- EPST Onde&Vibrations TDDocument7 pagesEPST Onde&Vibrations TDRafikWaynePas encore d'évaluation
- TD 06 Oscillateur Linéaire À Un Degré de Liberté / MouslimDocument2 pagesTD 06 Oscillateur Linéaire À Un Degré de Liberté / MouslimBadr MouslimPas encore d'évaluation
- TP MhsDocument6 pagesTP MhsWiam TerfaiPas encore d'évaluation
- TDMeca 7Document4 pagesTDMeca 7Ihsan MokhlissePas encore d'évaluation
- TD Oscillateurs PDFDocument3 pagesTD Oscillateurs PDFAnas Saada100% (1)
- Pendule OscillantDocument12 pagesPendule OscillantRad Ouan100% (1)
- Oscillateur Mécanique PDFDocument25 pagesOscillateur Mécanique PDFAkram EkkoPas encore d'évaluation
- BTS CPI 1 CH 8 Oscillatons Mécaniques LibresDocument3 pagesBTS CPI 1 CH 8 Oscillatons Mécaniques LibresLucas Filipuzzi100% (1)
- Mon TravailDocument4 pagesMon TravailChikov ÆminePas encore d'évaluation
- TD Oscillateur MecaDocument2 pagesTD Oscillateur MecaOdile StilePas encore d'évaluation
- Chapitre 1 Complet v2Document8 pagesChapitre 1 Complet v2y6mzjj92ycPas encore d'évaluation
- Cours 1 Systèmes Mécaniques OscillantsDocument6 pagesCours 1 Systèmes Mécaniques OscillantsbidaouimounirPas encore d'évaluation
- 4 Oscillateur Mecanique - CoursDocument22 pages4 Oscillateur Mecanique - Coursmariamars100% (2)
- Ch2 - Oscillateurs MécaniquesDocument12 pagesCh2 - Oscillateurs Mécaniquesloubna moufidPas encore d'évaluation
- Chap1 PhysiqueDocument22 pagesChap1 PhysiqueMouad MaaroufPas encore d'évaluation
- Cours OscillationsDocument18 pagesCours OscillationsaliabdalghafourPas encore d'évaluation
- 6G3Oscillations PDFDocument22 pages6G3Oscillations PDFAliOucharPas encore d'évaluation
- M4TD eDocument3 pagesM4TD eAicha DaouPas encore d'évaluation
- 1 Chapitre1-1ddlDocument25 pages1 Chapitre1-1ddlraffai_nadaPas encore d'évaluation
- Serie2 - Dynamique Des Structures 2019 PDFDocument2 pagesSerie2 - Dynamique Des Structures 2019 PDFMohamed ZakritiPas encore d'évaluation
- Physique D Chap14 Systeme - Solide - Ressort PDFDocument5 pagesPhysique D Chap14 Systeme - Solide - Ressort PDFSalim ErrabiiPas encore d'évaluation
- TD11 - Ondes MécaniquesDocument4 pagesTD11 - Ondes MécaniquesfwhyPas encore d'évaluation
- Oscillation Amortie À Un Degré de LibertéDocument15 pagesOscillation Amortie À Un Degré de LibertéMamadou Lamine FayePas encore d'évaluation
- Osc AmDocument6 pagesOsc AmEvaPas encore d'évaluation
- Recc81vision nc2b07Document5 pagesRecc81vision nc2b07dragokalPas encore d'évaluation
- Page FacebookDocument3 pagesPage FacebookDjm AlgPas encore d'évaluation
- Mham TDDocument15 pagesMham TDkindaishiPas encore d'évaluation
- Introduction À La Mécanique QuantiqueDocument86 pagesIntroduction À La Mécanique Quantiquepablo uribePas encore d'évaluation
- 6 G3 OscillationsDocument22 pages6 G3 OscillationsnateusssPas encore d'évaluation
- TD de Vibrations Des Systemes Discrets Solution PDFDocument33 pagesTD de Vibrations Des Systemes Discrets Solution PDFabdouelPas encore d'évaluation
- Cours VibrationsDocument15 pagesCours Vibrationssarah filaliPas encore d'évaluation
- Travaux Dirigés de Mécanique N°4: Exercice 1: Mesure D'un Coefficient de ViscositéDocument3 pagesTravaux Dirigés de Mécanique N°4: Exercice 1: Mesure D'un Coefficient de ViscositéMedjahed MhåmędPas encore d'évaluation
- TD Oscillations Amorties ForcéesDocument4 pagesTD Oscillations Amorties Forcéesمجهول العالمPas encore d'évaluation
- 3 Energie Mecanique - Cours PDFDocument42 pages3 Energie Mecanique - Cours PDFWenceslas Dima0% (1)
- Exmecanique 2008-2009 4 PDFDocument12 pagesExmecanique 2008-2009 4 PDFIl NBPas encore d'évaluation
- Oscillations Mécaniques Libres PDFDocument6 pagesOscillations Mécaniques Libres PDFAzizElheniPas encore d'évaluation
- Systemes 1ddlDocument21 pagesSystemes 1ddlYoucef BenhalilemPas encore d'évaluation
- Devoir SB2Document2 pagesDevoir SB2ouedraogodri2016Pas encore d'évaluation
- Compte Rendu TP2Document3 pagesCompte Rendu TP2Halima ZighPas encore d'évaluation
- Bac Physique Oscillations MecaniquesDocument21 pagesBac Physique Oscillations MecaniquesJean LeonardoPas encore d'évaluation
- Oscillateurs KharDocument16 pagesOscillateurs KharsidiPas encore d'évaluation
- Serie N02 - 2019-2020Document4 pagesSerie N02 - 2019-2020abir balaPas encore d'évaluation
- 1.vibrations Des PoutresDocument107 pages1.vibrations Des Poutrestouffaha moussaPas encore d'évaluation
- Équations différentielles: Les Grands Articles d'UniversalisD'EverandÉquations différentielles: Les Grands Articles d'UniversalisPas encore d'évaluation
- Cours de Dérivation.Document13 pagesCours de Dérivation.Boutayna J03Pas encore d'évaluation
- Courbes ParamétréesDocument14 pagesCourbes ParamétréesBoutayna J03Pas encore d'évaluation
- Cours FonderieDocument61 pagesCours FonderieBoutayna J03Pas encore d'évaluation
- Cours Calcul Intégrales Et Équations DifférentiellesDocument42 pagesCours Calcul Intégrales Et Équations DifférentiellesBoutayna J03Pas encore d'évaluation
- TD1 Algo 2022 2023Document3 pagesTD1 Algo 2022 2023Boutayna J03Pas encore d'évaluation
- Simulation Numerique D'Un Ecoulement Supersonique Externe: ThèmeDocument223 pagesSimulation Numerique D'Un Ecoulement Supersonique Externe: ThèmeRihem and Soundosse wordsPas encore d'évaluation
- Commande Prédictive Généralisée D'une MachineDocument112 pagesCommande Prédictive Généralisée D'une MachineHassene Trabelsi100% (1)
- Machines PDFDocument79 pagesMachines PDFSCORSAM1Pas encore d'évaluation
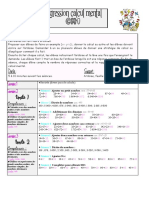
- Calcul Mental CM1 Progression Fiche EnseignantDocument11 pagesCalcul Mental CM1 Progression Fiche EnseignantMathilde BordePas encore d'évaluation
- Topologie Cours Et Exercices Corrigés by Queffélec, HervéDocument317 pagesTopologie Cours Et Exercices Corrigés by Queffélec, HervéMohamed Touibi100% (3)
- TD MTH332Document6 pagesTD MTH332Felix AFEKUPas encore d'évaluation
- DenombrementDocument2 pagesDenombrementJaouad AmmiPas encore d'évaluation
- Cours Équations (Rappels) + CorrigéDocument3 pagesCours Équations (Rappels) + CorrigéRomane CopinPas encore d'évaluation
- TD de Théorie de L'info.1.corrigé PDFDocument4 pagesTD de Théorie de L'info.1.corrigé PDFChouichi GhadaPas encore d'évaluation
- QCM PsDocument9 pagesQCM PsNasrineBoukarouraPas encore d'évaluation
- MON (A) DE. Esquisse D'une Topologie Transcendentale Thomas MauriceDocument84 pagesMON (A) DE. Esquisse D'une Topologie Transcendentale Thomas MauriceIntinionPas encore d'évaluation
- Rapport PfaDocument46 pagesRapport PfaErrafiy OmarPas encore d'évaluation
- Propagation Des Ondes SismiquesDocument19 pagesPropagation Des Ondes Sismiquesdjeddi mabrouk86% (7)
- FourierDocument2 pagesFourierNguena EstherPas encore d'évaluation
- Chap 4 L5 Symboles Et Mobilité Des LiaisonsDocument38 pagesChap 4 L5 Symboles Et Mobilité Des LiaisonsAbdel Moula ChouchenePas encore d'évaluation
- Série de Fourier - GlobaleDocument57 pagesSérie de Fourier - Globaleتائب بسامPas encore d'évaluation
- La Cotation FonctionnelleDocument6 pagesLa Cotation Fonctionnelleعبد الباري الجزائري100% (1)
- CH 1 Les Intérêts Simples v2020 - 2021Document30 pagesCH 1 Les Intérêts Simples v2020 - 2021Mona MzraaPas encore d'évaluation
- TM2 (NLP)Document30 pagesTM2 (NLP)Lion Abderrazak100% (1)
- Determinant Ex 03 SolDocument2 pagesDeterminant Ex 03 SolAbdou BoukhalfaPas encore d'évaluation
- Les Techniques D'ordonnancementDocument22 pagesLes Techniques D'ordonnancementSaf Bes83% (6)
- Introduction Aux Equations Aux D Eriv Ees Partielles: Sylvie Benzoni 18 Janvier 2005Document79 pagesIntroduction Aux Equations Aux D Eriv Ees Partielles: Sylvie Benzoni 18 Janvier 2005fekayvePas encore d'évaluation
- Cours Architect Ordi Diarra 2020Document59 pagesCours Architect Ordi Diarra 2020Kouassi Francis KouamePas encore d'évaluation
- Cours Signaux Chapitre 5 6 ETUDIANTSDocument32 pagesCours Signaux Chapitre 5 6 ETUDIANTSHacene OurtemachePas encore d'évaluation
- Conseils AbdoDocument6 pagesConseils AbdoCBYPas encore d'évaluation
- Cours Mecanique VibrationsDocument0 pageCours Mecanique Vibrationsvousfaitechier100% (1)
- Analyse Numerique Des EDP1Document84 pagesAnalyse Numerique Des EDP1beckerrolandhPas encore d'évaluation
- Regulateur PIDDocument14 pagesRegulateur PIDsaidiabdelhamidePas encore d'évaluation
- 2015 - Tableaux Dérivées, Primitives, DL PDFDocument3 pages2015 - Tableaux Dérivées, Primitives, DL PDFSaid AbbaouiPas encore d'évaluation
- IO Tronc CommunDocument34 pagesIO Tronc Communسعيد سعيدPas encore d'évaluation