Vous aimerez peut-être aussi
- Ebook Petit Cours D Autodefense IntellectuelleDocument345 pagesEbook Petit Cours D Autodefense IntellectuelleZoula Khidri100% (5)
- Examens Et Rattrapages Avec Corrige Phys3Document15 pagesExamens Et Rattrapages Avec Corrige Phys3Rethy Den91% (11)
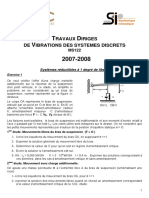
- TD de Vibrations Des Systemes Discrets Solution PDFDocument33 pagesTD de Vibrations Des Systemes Discrets Solution PDFabdouelPas encore d'évaluation
- Dosage Indirect Eau de JavelDocument6 pagesDosage Indirect Eau de JavelJean Leonardo100% (2)
- Programme Français Niveaua1 - 1Document4 pagesProgramme Français Niveaua1 - 1bluegreeneyesPas encore d'évaluation
- Meca Osc Na PDFDocument3 pagesMeca Osc Na PDFIssamPas encore d'évaluation
- Exercices 3 Systèmes Mécaniques OscillantsDocument3 pagesExercices 3 Systèmes Mécaniques OscillantsIlidi houcinePas encore d'évaluation
- Série d'exercices - Physique Oscillations mécaniques libres - Bac Sciences exp (2014-2015) Mr Handoura NaceurDocument4 pagesSérie d'exercices - Physique Oscillations mécaniques libres - Bac Sciences exp (2014-2015) Mr Handoura Naceura6857971Pas encore d'évaluation
- Exmecanique 2008-2009 4 PDFDocument12 pagesExmecanique 2008-2009 4 PDFAliOucharPas encore d'évaluation
- Oscillations Mécaniques Libres PDFDocument6 pagesOscillations Mécaniques Libres PDFAzizElheniPas encore d'évaluation
- MecforcDocument2 pagesMecforcabdelkrim salemPas encore d'évaluation
- Sujets Examens Vibrations Et Ondes Avant 2005Document26 pagesSujets Examens Vibrations Et Ondes Avant 2005Wassim NostraPas encore d'évaluation
- Oscillations Mecaniques Libres PDFDocument6 pagesOscillations Mecaniques Libres PDFMohamed El OuahdaniPas encore d'évaluation
- MP PHYSIQUE X 1 2015.enonceDocument8 pagesMP PHYSIQUE X 1 2015.enoncechaddad abdllahPas encore d'évaluation
- td2 VibraDocument5 pagestd2 VibraAilton muhanchePas encore d'évaluation
- Série D'exercices N°8 - Sciences Physiques Les Oscillations Mécaniques Libres - Bac Technique (2010-2011) MR ALIBI ANOUARDocument6 pagesSérie D'exercices N°8 - Sciences Physiques Les Oscillations Mécaniques Libres - Bac Technique (2010-2011) MR ALIBI ANOUARKais GuesmiPas encore d'évaluation
- Série D'exercices - Physique - Oscilation Mecanique Libre - Bac Mathématiques (2016-2017) MR Afdal AliDocument5 pagesSérie D'exercices - Physique - Oscilation Mecanique Libre - Bac Mathématiques (2016-2017) MR Afdal AliOuedraogo HarounaPas encore d'évaluation
- Sér1-1 - Oscillations MécaniquesDocument6 pagesSér1-1 - Oscillations MécaniquesAziz Bem100% (1)
- TD de Vibrations Des Systemes Discrets + SolutionDocument33 pagesTD de Vibrations Des Systemes Discrets + SolutionAfif Al Baalbaki50% (6)
- Chapitre 1 Complet v2Document8 pagesChapitre 1 Complet v2y6mzjj92ycPas encore d'évaluation
- TD5 oscillations mécaniqueDocument2 pagesTD5 oscillations mécaniqueAnderson CoulibalyPas encore d'évaluation
- CnamC42 2008 PDFDocument12 pagesCnamC42 2008 PDFChakir LaiminaPas encore d'évaluation
- ctr1 2018Document2 pagesctr1 2018azzamPas encore d'évaluation
- Exercices 2Document9 pagesExercices 2brahim_mdPas encore d'évaluation
- Exercices PV 2009-2010CITSEDocument11 pagesExercices PV 2009-2010CITSEfounè diassanaPas encore d'évaluation
- 15 MP Sujet PhyDocument8 pages15 MP Sujet PhyHarakat ElhoucinePas encore d'évaluation
- CollègeABBertoua Physique TleC BaccBlanc2 2021Document5 pagesCollègeABBertoua Physique TleC BaccBlanc2 2021hitmanPas encore d'évaluation
- Examen de Physique 3 LMD ST Duree 1h 30Document22 pagesExamen de Physique 3 LMD ST Duree 1h 30jemaiPas encore d'évaluation
- Emd GC L2 PDFDocument41 pagesEmd GC L2 PDFBreathe 4 footballPas encore d'évaluation
- EPST Onde&Vibrations TDDocument7 pagesEPST Onde&Vibrations TDRafikWaynePas encore d'évaluation
- Recc81vision nc2b07Document5 pagesRecc81vision nc2b07dragokalPas encore d'évaluation
- C4 TD Oscillations Mecaniques 1Document3 pagesC4 TD Oscillations Mecaniques 1moryammossati92Pas encore d'évaluation
- Serie Oscillations Mécaniques LibresDocument6 pagesSerie Oscillations Mécaniques Libreskhlifisamir19Pas encore d'évaluation
- Ondes Et Vibrations - Chap - 01 PDFDocument40 pagesOndes Et Vibrations - Chap - 01 PDFBoudjema SoudedPas encore d'évaluation
- Problème N°1: Démodulation de Signaux Modulés en AmplitudeDocument4 pagesProblème N°1: Démodulation de Signaux Modulés en AmplitudefadiouaddahPas encore d'évaluation
- Ondes 2e Année MP-MP PC-PC Psi-Psi PT-PTDocument291 pagesOndes 2e Année MP-MP PC-PC Psi-Psi PT-PTg67% (3)
- Serie TD03Document3 pagesSerie TD03noussaibabhPas encore d'évaluation
- TD Asservissement m1 Spi-GmaDocument48 pagesTD Asservissement m1 Spi-Gmamechernene_aek90370% (1)
- Exemples Patrick PaultreDocument41 pagesExemples Patrick Paultremostefaoui mohammed100% (1)
- TD (Ondes)Document2 pagesTD (Ondes)Sovann_LongPas encore d'évaluation
- Exercice 1 (6 Points) Oscillations D'un Pendule Élastique HorizontalDocument8 pagesExercice 1 (6 Points) Oscillations D'un Pendule Élastique HorizontalHouzal-dine SaidPas encore d'évaluation
- Cours 1 Systèmes Mécaniques OscillantsDocument6 pagesCours 1 Systèmes Mécaniques OscillantsbidaouimounirPas encore d'évaluation
- Représentation D'état - EhtpDocument94 pagesReprésentation D'état - EhtpAbiadiPas encore d'évaluation
- Contrôle 2 PMEDENINE 20162 CORRDocument5 pagesContrôle 2 PMEDENINE 20162 CORRadouma dubsPas encore d'évaluation
- Td2-Slci 2Document2 pagesTd2-Slci 2kamalPas encore d'évaluation
- Session 2005Document24 pagesSession 2005bchouPas encore d'évaluation
- Série D'exercices - Physique Oscillateurs Mecaniques Libres Amortis Et Non Amortis - Bac Sciences Exp (2011-2012) MR TRAYIA NABIL PDFDocument5 pagesSérie D'exercices - Physique Oscillateurs Mecaniques Libres Amortis Et Non Amortis - Bac Sciences Exp (2011-2012) MR TRAYIA NABIL PDFAzizElheni100% (3)
- Exercices 1 Systèmes Mécaniques Oscillants (Mahdade Allal)Document19 pagesExercices 1 Systèmes Mécaniques Oscillants (Mahdade Allal)Majed GharibPas encore d'évaluation
- Physique Cours SavoirFaire 2022 2023Document30 pagesPhysique Cours SavoirFaire 2022 2023Louis MilletPas encore d'évaluation
- Tdos4 OHADocument2 pagesTdos4 OHAfweazz0310Pas encore d'évaluation
- TD Oscillateurs Mecaniques Libres 2016Document7 pagesTD Oscillateurs Mecaniques Libres 2016Oumar TraoréPas encore d'évaluation
- Physique Terminale Cd1 221221 100958Document10 pagesPhysique Terminale Cd1 221221 100958Eldin KamgaPas encore d'évaluation
- Devoir Surveillé 1 15 16 OndesvibrationsDocument10 pagesDevoir Surveillé 1 15 16 Ondesvibrationssihamarbaz14Pas encore d'évaluation
- إلامتحانات التجريبية 2023Document40 pagesإلامتحانات التجريبية 2023AYEX EDIT0% (1)
- Sujet IG-2006Document8 pagesSujet IG-2006Atou RamPas encore d'évaluation
- Pendule OscillantDocument12 pagesPendule OscillantRad Ouan100% (1)
- TleD - PHY - L5 - Oscillations Mécaniques LibresDocument8 pagesTleD - PHY - L5 - Oscillations Mécaniques LibresYssah SerifouPas encore d'évaluation
- Equation de La Corde VibranteDocument5 pagesEquation de La Corde Vibrantedifortune6493Pas encore d'évaluation
- ExercicesDocument5 pagesExercicesHamza KhallafPas encore d'évaluation
- Exercices d'optique et d'électromagnétismeD'EverandExercices d'optique et d'électromagnétismeÉvaluation : 5 sur 5 étoiles5/5 (1)
- Dynamique: Les Grands Articles d'UniversalisD'EverandDynamique: Les Grands Articles d'UniversalisPas encore d'évaluation
- TP Et Cours TopographieDocument135 pagesTP Et Cours TopographieJean Leonardo80% (5)
- Cours Dessins D ArchitectureDocument7 pagesCours Dessins D Architecturekhalidlkkk100% (1)
- Acides Et BasesDocument11 pagesAcides Et BasesJean LeonardoPas encore d'évaluation
- 5 G3 ElectriciteDocument164 pages5 G3 ElectriciteJean LeonardoPas encore d'évaluation
- Résistance ÉquivalenteDocument6 pagesRésistance ÉquivalenteJean LeonardoPas encore d'évaluation
- C14 Cours Champs Vectoriel ScalaireDocument5 pagesC14 Cours Champs Vectoriel ScalaireJean LeonardoPas encore d'évaluation
- Esterification Et HydrolyseDocument1 pageEsterification Et HydrolyseJean LeonardoPas encore d'évaluation
- Systeme Solaire CursifDocument4 pagesSysteme Solaire CursifJean LeonardoPas encore d'évaluation
- Cours Voltmetre en AlternatifDocument1 pageCours Voltmetre en AlternatifJean LeonardoPas encore d'évaluation
- Champ ElectrostatiqueDocument12 pagesChamp ElectrostatiqueRYM1993Pas encore d'évaluation
- DifferenceDocument4 pagesDifferenceJean LeonardoPas encore d'évaluation
- Charge Ponct PlanDocument3 pagesCharge Ponct PlanJean LeonardoPas encore d'évaluation
- Champ EDocument12 pagesChamp EMissIndia ZahrellaaPas encore d'évaluation
- Charges Ponctuelles en ElectrostatiqueDocument29 pagesCharges Ponctuelles en ElectrostatiqueJean LeonardoPas encore d'évaluation
- Charge Ponct PlanDocument3 pagesCharge Ponct PlanJean LeonardoPas encore d'évaluation
- TP1 Electrisation MMDocument2 pagesTP1 Electrisation MMJean LeonardoPas encore d'évaluation
- Chap VDocument12 pagesChap VkuuroroPas encore d'évaluation
- Bac Physique Oscillations Electriques Libres Circuit RLCDocument17 pagesBac Physique Oscillations Electriques Libres Circuit RLCJean Leonardo100% (1)
- Photoshop Pour Le PhotographeDocument19 pagesPhotoshop Pour Le PhotographeGabryska AzeliyahPas encore d'évaluation
- TP PhysiqueDocument1 pageTP PhysiqueJean LeonardoPas encore d'évaluation
- TP2 e MRUA11Document3 pagesTP2 e MRUA11Jean LeonardoPas encore d'évaluation
- TP Mouvementplan InclineDocument2 pagesTP Mouvementplan InclineJean LeonardoPas encore d'évaluation
- Travaux Pratiques de PhysiquesDocument56 pagesTravaux Pratiques de PhysiquesJean LeonardoPas encore d'évaluation
- Etude MouvementDocument3 pagesEtude MouvementJean Leonardo100% (1)
- Cours PhotoshopDocument237 pagesCours PhotoshopJean LeonardoPas encore d'évaluation
- TP de Physique Table À Coussin D'air PDFDocument1 pageTP de Physique Table À Coussin D'air PDFJean LeonardoPas encore d'évaluation
- Cours - Mecanique Du Solide Et Des MateriauxDocument129 pagesCours - Mecanique Du Solide Et Des MateriauxJean LeonardoPas encore d'évaluation
- Utilisation de PhotoshopDocument12 pagesUtilisation de PhotoshopJean LeonardoPas encore d'évaluation
- Cécile DemaudeDocument4 pagesCécile DemaudeliliphinexPas encore d'évaluation
- Bedel Olle Josiana RAPPORT DE STAGE 3ème3 (10) .OdtDocument13 pagesBedel Olle Josiana RAPPORT DE STAGE 3ème3 (10) .OdtjosianaPas encore d'évaluation
- Règlement D'application de L'accord Portant Révision de L'accord de Bangui 1977Document8 pagesRèglement D'application de L'accord Portant Révision de L'accord de Bangui 1977Adrien RainPas encore d'évaluation
- Supports de CoursDocument62 pagesSupports de CoursSoufian Ouenzar100% (1)
- Le Fruit DéfenduDocument6 pagesLe Fruit DéfenduStradin Bien-aimePas encore d'évaluation
- Khaled Abou El Fadl Rebellion and ViolenDocument2 pagesKhaled Abou El Fadl Rebellion and ViolenlekohPas encore d'évaluation
- Cours MS1 Treillis MetalliquesDocument33 pagesCours MS1 Treillis MetalliquesJean-Vincent Kandela100% (1)
- Viento Recio - Partitura CompletaDocument4 pagesViento Recio - Partitura CompletaAdonayPas encore d'évaluation
- Les Socles de Competences - Formation Mathematique (Ressource 1653) PDFDocument15 pagesLes Socles de Competences - Formation Mathematique (Ressource 1653) PDFdgsqfruerjtrsPas encore d'évaluation
- tp15 MaiverDocument19 pagestp15 MaiverhenryPas encore d'évaluation
- Lauzanne L. Loubens G. Peces Del Río Mamoré (1985)Document113 pagesLauzanne L. Loubens G. Peces Del Río Mamoré (1985)Lila da Silva MoralesPas encore d'évaluation
- (Elena Cassin) La Splendeur DivineDocument82 pages(Elena Cassin) La Splendeur DivineomarnsheaPas encore d'évaluation
- Marie-Madeleine by Sylvaine Landrivon (Landrivon, Sylvaine)Document126 pagesMarie-Madeleine by Sylvaine Landrivon (Landrivon, Sylvaine)Gabriela Negru100% (1)
- Chapitre 2 Aftis Expo 3Document12 pagesChapitre 2 Aftis Expo 3Ayyoub DriouechPas encore d'évaluation
- 10 Sujets Pour Lesquels Nous Devrions Prier Plus SouventDocument4 pages10 Sujets Pour Lesquels Nous Devrions Prier Plus SouventJacques ZinsePas encore d'évaluation
- Preparation A L'envir ProfessDocument12 pagesPreparation A L'envir Professeya.jemaiPas encore d'évaluation
- Cours Maintenance 2BENIM 1 PDFDocument99 pagesCours Maintenance 2BENIM 1 PDFhocine100% (1)
- Swade Deadlandstheweirdwest ScntoutceqDocument2 pagesSwade Deadlandstheweirdwest ScntoutceqLaurentPas encore d'évaluation
- Cours Initiation À L'architectureDocument271 pagesCours Initiation À L'architectureFoufa Archi100% (3)
- ME Resume Conception Des Mecanismes Version 2022 2023 AV 10 01 2023 Période 3Document55 pagesME Resume Conception Des Mecanismes Version 2022 2023 AV 10 01 2023 Période 3ghali besriPas encore d'évaluation
- FREN 4101 B ExercicesDocument5 pagesFREN 4101 B ExercicesMa BeleuPas encore d'évaluation
- M26 - Moyens de Recherche D'emploi GE-ESA PDFDocument7 pagesM26 - Moyens de Recherche D'emploi GE-ESA PDFMohammed Amine KenedPas encore d'évaluation
- Cours 2 Naissance de La Modernite - CPDocument146 pagesCours 2 Naissance de La Modernite - CPOussama ElkPas encore d'évaluation
- 02 Excel Avancé PDFDocument29 pages02 Excel Avancé PDFans1390Pas encore d'évaluation
- Elle Est Bénie de DieuDocument1 pageElle Est Bénie de Dieudark musPas encore d'évaluation
- 3 Phase RectifierDocument72 pages3 Phase RectifierViet VietPas encore d'évaluation
- Droit Des Contrats SpéciauxDocument18 pagesDroit Des Contrats SpéciauxTamih TamihPas encore d'évaluation
- Denombrement PDFDocument5 pagesDenombrement PDFAhmed EnnajiPas encore d'évaluation