Vous aimerez peut-être aussi
- Physique v2Document12 pagesPhysique v2laila.kridah15Pas encore d'évaluation
- TD 1 VibrationsDocument27 pagesTD 1 Vibrationskaoutar soumatiPas encore d'évaluation
- td2 VibraDocument5 pagestd2 VibraAilton muhanchePas encore d'évaluation
- TD Oscillateur MecaDocument2 pagesTD Oscillateur MecaOdile StilePas encore d'évaluation
- Ondes Et Vibrations: IUT, Année 2008-09Document16 pagesOndes Et Vibrations: IUT, Année 2008-09Armand StevenskiPas encore d'évaluation
- TD (Ondes)Document2 pagesTD (Ondes)Sovann_LongPas encore d'évaluation
- Devoir de Synthese N°2: Ecole Sadiki TunisDocument4 pagesDevoir de Synthese N°2: Ecole Sadiki TunistorkitaherPas encore d'évaluation
- C4 TD Oscillations Mecaniques 1Document3 pagesC4 TD Oscillations Mecaniques 1moryammossati92Pas encore d'évaluation
- Sujets Examens Vibrations Et Ondes Avant 2005Document26 pagesSujets Examens Vibrations Et Ondes Avant 2005Wassim NostraPas encore d'évaluation
- Page FacebookDocument3 pagesPage FacebookDjm AlgPas encore d'évaluation
- Travaux Dirigés de Mécanique N°4: Exercice 1: Mesure D'un Coefficient de ViscositéDocument3 pagesTravaux Dirigés de Mécanique N°4: Exercice 1: Mesure D'un Coefficient de ViscositéMedjahed MhåmędPas encore d'évaluation
- Série D'exercices - Physique Oscillations Mécaniques Forcées (SC Exp) - Bac Sciences Exp (2014-2015) MR Handoura NaceurDocument4 pagesSérie D'exercices - Physique Oscillations Mécaniques Forcées (SC Exp) - Bac Sciences Exp (2014-2015) MR Handoura NaceurGhada DaddouPas encore d'évaluation
- L1 MVT TD1Document7 pagesL1 MVT TD1Aïmane CheikhPas encore d'évaluation
- TD Ondes Serie2 (17 - 18)Document5 pagesTD Ondes Serie2 (17 - 18)Malick DiopPas encore d'évaluation
- Exercices 3 Systèmes Mécaniques OscillantsDocument3 pagesExercices 3 Systèmes Mécaniques OscillantsIlidi houcinePas encore d'évaluation
- Exercices de Réfraction Des Ondes Dans Les Fluides - EnoncésDocument7 pagesExercices de Réfraction Des Ondes Dans Les Fluides - EnoncésScribd ReaderPas encore d'évaluation
- Exercices 1 Systèmes Mécaniques Oscillants (Mahdade Allal)Document19 pagesExercices 1 Systèmes Mécaniques Oscillants (Mahdade Allal)Majed GharibPas encore d'évaluation
- TD11 - Ondes MécaniquesDocument4 pagesTD11 - Ondes MécaniquesfwhyPas encore d'évaluation
- Osc AmDocument6 pagesOsc AmEvaPas encore d'évaluation
- Exercice 1 (6 Points) Oscillations D'un Pendule Élastique HorizontalDocument8 pagesExercice 1 (6 Points) Oscillations D'un Pendule Élastique HorizontalHouzal-dine SaidPas encore d'évaluation
- Devoir Surveillé de Physique N°3 (3 H 30) : Exercice 1: Questions de CoursDocument11 pagesDevoir Surveillé de Physique N°3 (3 H 30) : Exercice 1: Questions de CoursRussel YeoPas encore d'évaluation
- Examen OV 2023 Enoncé ModDocument3 pagesExamen OV 2023 Enoncé Modkhelloufi khadidjaPas encore d'évaluation
- MFTD 2Document3 pagesMFTD 2Fatima Ezzahrae BOUITAPas encore d'évaluation
- Exmecanique 2008-2009 4 PDFDocument12 pagesExmecanique 2008-2009 4 PDFIl NBPas encore d'évaluation
- إلامتحانات التجريبية 2023Document40 pagesإلامتحانات التجريبية 2023AYEX EDIT0% (1)
- Mec Forcé 2023Document4 pagesMec Forcé 2023Aymen ToumiPas encore d'évaluation
- Mini Projet-5Document4 pagesMini Projet-5You NesPas encore d'évaluation
- 1agm 2019-2020 PDFDocument11 pages1agm 2019-2020 PDFAhmed AhmedPas encore d'évaluation
- Bac Physique Oscillations MecaniquesDocument21 pagesBac Physique Oscillations MecaniquesJean LeonardoPas encore d'évaluation
- Vo Serie4Document4 pagesVo Serie4Charaf LeoPas encore d'évaluation
- Mouvement Harmonique SimpleDocument40 pagesMouvement Harmonique Simpleraphael bibePas encore d'évaluation
- Examen de p3Document26 pagesExamen de p3zakaria ziko ZPas encore d'évaluation
- Travaux Diriges Vibrations 2023Document4 pagesTravaux Diriges Vibrations 2023zeynab Rassoul100% (1)
- Osc FoDocument6 pagesOsc FoJay SlvatrPas encore d'évaluation
- Exercices Syst Oscillant TSM17 FRDocument19 pagesExercices Syst Oscillant TSM17 FRWin's Miringui'sPas encore d'évaluation
- Exercices PV 2009-2010CITSEDocument11 pagesExercices PV 2009-2010CITSEfounè diassanaPas encore d'évaluation
- Sér1-1 - Oscillations MécaniquesDocument6 pagesSér1-1 - Oscillations MécaniquesAziz Bem100% (1)
- Ondes Exercices CorrigésDocument22 pagesOndes Exercices CorrigésHaroun HarrarPas encore d'évaluation
- TD 3 Ma 2018 VF1Document6 pagesTD 3 Ma 2018 VF1Mohamed BelbarakaPas encore d'évaluation
- TleD - PHY - L5 - Oscillations Mécaniques LibresDocument8 pagesTleD - PHY - L5 - Oscillations Mécaniques LibresYssah SerifouPas encore d'évaluation
- Pendule Elastique Exercices Non Corriges 2 1Document9 pagesPendule Elastique Exercices Non Corriges 2 1Germain YvesPas encore d'évaluation
- Chapitre 1 - GeneralitesDocument9 pagesChapitre 1 - Generalitesيسرى بوشوشةPas encore d'évaluation
- Exmecanique 2008-2009 4 PDFDocument12 pagesExmecanique 2008-2009 4 PDFAliOucharPas encore d'évaluation
- Série-1-SMP4-MQ 2020-2021Document3 pagesSérie-1-SMP4-MQ 2020-2021aitelhachminassimPas encore d'évaluation
- 2022 AmNord J2 ExoA Correction PenteLunette 5ptsDocument6 pages2022 AmNord J2 ExoA Correction PenteLunette 5ptsYoram JdlPas encore d'évaluation
- MQ-TD & ExamensDocument37 pagesMQ-TD & ExamensFatima ElmourabitPas encore d'évaluation
- Cor Exam Jan23 p202Document6 pagesCor Exam Jan23 p202bechir sidialyPas encore d'évaluation
- EPST Onde&Vibrations TDDocument7 pagesEPST Onde&Vibrations TDRafikWaynePas encore d'évaluation
- Preparation DS 05Document8 pagesPreparation DS 05الدعم الجامعيPas encore d'évaluation
- td1 2022 2023Document4 pagestd1 2022 2023Mohamed FiftaPas encore d'évaluation
- TDMeca 7Document4 pagesTDMeca 7Ihsan MokhlissePas encore d'évaluation
- Devoir Surveillé 1 18 19 OndesvibrationDocument6 pagesDevoir Surveillé 1 18 19 Ondesvibrationsihamarbaz14Pas encore d'évaluation
- Sujet IG-2006Document8 pagesSujet IG-2006Atou RamPas encore d'évaluation
- Exo X UlmDocument8 pagesExo X UlmAnas AbidiPas encore d'évaluation
- EF1 Vibration1 2016Document14 pagesEF1 Vibration1 2016hubfriPas encore d'évaluation
- Exercices d'optique et d'électromagnétismeD'EverandExercices d'optique et d'électromagnétismeÉvaluation : 5 sur 5 étoiles5/5 (1)
- Équations différentielles: Les Grands Articles d'UniversalisD'EverandÉquations différentielles: Les Grands Articles d'UniversalisPas encore d'évaluation
- Ch. Iv.a Del+td 2023Document21 pagesCh. Iv.a Del+td 2023sihamarbaz14Pas encore d'évaluation
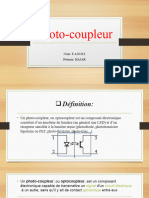
- Photo CoupleurDocument11 pagesPhoto Coupleursihamarbaz14Pas encore d'évaluation
- Examen 2022Document2 pagesExamen 2022sihamarbaz14Pas encore d'évaluation
- CH. II. Notions Sur Le LASER. LPA 2022Document31 pagesCH. II. Notions Sur Le LASER. LPA 2022sihamarbaz14Pas encore d'évaluation
- Photo-Coupleur DevoirDocument10 pagesPhoto-Coupleur Devoirsihamarbaz14Pas encore d'évaluation
- CH IV.B Photodiode+TD.2023Document17 pagesCH IV.B Photodiode+TD.2023sihamarbaz14Pas encore d'évaluation
- TP Vom Compte Rendu Cordes VibrantesDocument3 pagesTP Vom Compte Rendu Cordes VibrantesFeniX 4 everPas encore d'évaluation
- I144 - Cours (Alternatif - Chapitre 3)Document56 pagesI144 - Cours (Alternatif - Chapitre 3)sihamarbaz14Pas encore d'évaluation
- Capteur Partie 2Document53 pagesCapteur Partie 2sihamarbaz14Pas encore d'évaluation
- Tp1.2.3.lpa. 2024Document4 pagesTp1.2.3.lpa. 2024sihamarbaz14Pas encore d'évaluation
- Projrt QyantiqueDocument2 pagesProjrt Qyantiquesihamarbaz14Pas encore d'évaluation
- TP 3333333333Document13 pagesTP 3333333333sihamarbaz14Pas encore d'évaluation
- Devoir Maison 23 24 OndesDocument2 pagesDevoir Maison 23 24 Ondessihamarbaz14Pas encore d'évaluation
- Ch. Iv. Fo.2023Document39 pagesCh. Iv. Fo.2023sihamarbaz14Pas encore d'évaluation
- Wa0008Document1 pageWa0008sihamarbaz14Pas encore d'évaluation
- TP1 FinalDocument6 pagesTP1 Finalsihamarbaz14Pas encore d'évaluation
- Spectroscopie MoleculaireDocument7 pagesSpectroscopie Moleculairesihamarbaz14Pas encore d'évaluation
- Laser Presentation-1 (3) (1) (1) (Enregistrement Automatique)Document16 pagesLaser Presentation-1 (3) (1) (1) (Enregistrement Automatique)sihamarbaz14Pas encore d'évaluation
- Mini Projet LaserDocument13 pagesMini Projet Lasersihamarbaz14Pas encore d'évaluation
- Correction Probleme 4 TD QuadripolesDocument5 pagesCorrection Probleme 4 TD Quadripolessihamarbaz14Pas encore d'évaluation
- Corrige TD3 OndesDocument25 pagesCorrige TD3 Ondessihamarbaz14Pas encore d'évaluation
- Notice de La Commande Numerique DSP BRAXESDocument11 pagesNotice de La Commande Numerique DSP BRAXESHassan HassanPas encore d'évaluation
- Signalisation Routière - Verticale Et Horizontale - OrnikarDocument7 pagesSignalisation Routière - Verticale Et Horizontale - OrnikarTalloudPas encore d'évaluation
- Bulletin Service Manilles 2013.02 (FR)Document3 pagesBulletin Service Manilles 2013.02 (FR)bestoff82100% (1)
- Brand PriceDocument6 pagesBrand PriceBonnesAffairesConstantine100% (1)
- Plan Comptable Minimum NormaliséDocument32 pagesPlan Comptable Minimum NormaliséRené yvesPas encore d'évaluation
- Club944 - Net - Injection Bosch L-JetronicDocument8 pagesClub944 - Net - Injection Bosch L-JetronicYann DaynatPas encore d'évaluation
- Dégradations de ChausséeDocument13 pagesDégradations de Chaussée'Tarik Louati50% (2)
- Coefficient K, Devis Estimatif, Quantitatif Et PlanificationDocument21 pagesCoefficient K, Devis Estimatif, Quantitatif Et PlanificationMarco JoyPas encore d'évaluation
- Premior Mat - FRDocument3 pagesPremior Mat - FRgogoPas encore d'évaluation
- Avp Loi 67.15 FRDocument9 pagesAvp Loi 67.15 FRSerge KohemunPas encore d'évaluation
- Rapport de StageDocument15 pagesRapport de StageAgossa BénédictePas encore d'évaluation
- Protocole KINE PREOP Etude Pilote Sur La Préhabilitation Pulmonaire en Libéral Dans Le Cadre de La Chirurgie Thoracique Pulmonaire OncologiqueDocument103 pagesProtocole KINE PREOP Etude Pilote Sur La Préhabilitation Pulmonaire en Libéral Dans Le Cadre de La Chirurgie Thoracique Pulmonaire OncologiqueSelmaPas encore d'évaluation
- 1901 Vierendeel. Stabilite Des Constructions. Tome III PDFDocument137 pages1901 Vierendeel. Stabilite Des Constructions. Tome III PDFmouradPas encore d'évaluation
- Video RO1Document39 pagesVideo RO1lovebooksPas encore d'évaluation
- Les 3 Jeunes Detectives (037) - Silence, On Tue ! - Alfred HitchcockDocument121 pagesLes 3 Jeunes Detectives (037) - Silence, On Tue ! - Alfred HitchcockEric LefrançaisPas encore d'évaluation
- CinematiqueDocument22 pagesCinematiquepaul_fredric3173Pas encore d'évaluation
- Philosophie Subtile ParacelseDocument16 pagesPhilosophie Subtile Paracelseredvelvetmask2343Pas encore d'évaluation
- VRAI - FAUX DEVOIR (Sujet)Document1 pageVRAI - FAUX DEVOIR (Sujet)karim sharifPas encore d'évaluation
- 1Document8 pages1Ladys Ruth Caballero PeluffoPas encore d'évaluation
- Introduction À La Science Des Matériaux Propriétés Générales Des MatériauxDocument27 pagesIntroduction À La Science Des Matériaux Propriétés Générales Des MatériauxDelphin Kandolo100% (1)
- Examen Pruebas de Acceso A La Universidad FRANCES 2021 2022Document13 pagesExamen Pruebas de Acceso A La Universidad FRANCES 2021 2022Andres HerreraPas encore d'évaluation
- BrainstormingDocument4 pagesBrainstormingndeyadiop1203Pas encore d'évaluation
- Corbin 1458816683Document1 pageCorbin 1458816683rodrigomichellPas encore d'évaluation
- Med 5an Cas Clinique1 GynecoDocument7 pagesMed 5an Cas Clinique1 GynecoIbtissem TissamPas encore d'évaluation
- Parler de La Nourriture Mars 2021 FinaleDocument19 pagesParler de La Nourriture Mars 2021 FinalepeterPas encore d'évaluation
- BF492 mgt16041Document139 pagesBF492 mgt16041Michel BMPas encore d'évaluation
- Première Année de Médecine Dentaire Module de Biophysique Chapitre 3 Prof Karim MANSOUR 2022Document26 pagesPremière Année de Médecine Dentaire Module de Biophysique Chapitre 3 Prof Karim MANSOUR 2022wiamePas encore d'évaluation
- Voyage de La Grèce PDFDocument539 pagesVoyage de La Grèce PDFspéculairePas encore d'évaluation
- Helicobacter PyloriDocument4 pagesHelicobacter Pyloriadjerad omarPas encore d'évaluation
- 179 PDFDocument104 pages179 PDFaghilif100% (1)