Vous aimerez peut-être aussi
- Suspension VTTDocument4 pagesSuspension VTTmasteratsii100% (1)
- Annales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésD'EverandAnnales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
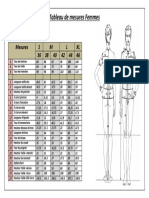
- Tableau de Mesures Femme Pret A PorterDocument1 pageTableau de Mesures Femme Pret A PorterKhadija Adaha100% (2)
- Cours Equadiff Ordre2 2023Document4 pagesCours Equadiff Ordre2 2023Younes EL BAHRAOUIPas encore d'évaluation
- Forme Normalisée: N. Champarnaud-LMB-nov 2022Document7 pagesForme Normalisée: N. Champarnaud-LMB-nov 2022Michel FoadiengPas encore d'évaluation
- Equa Diff Cnam 2015 PDFDocument5 pagesEqua Diff Cnam 2015 PDFMonsou Alex MongninhiPas encore d'évaluation
- Chap10 Equations Differentielles2 CMDocument49 pagesChap10 Equations Differentielles2 CMYounes EL BAHRAOUIPas encore d'évaluation
- 2 Equadiff S2PeiPDocument10 pages2 Equadiff S2PeiPFrank FoguePas encore d'évaluation
- EDO Ordre 1Document8 pagesEDO Ordre 1Mahamat AbdramanePas encore d'évaluation
- EDO Ordre 2Document8 pagesEDO Ordre 2Mahamat AbdramanePas encore d'évaluation
- Chapitre 4 Equation DifferentielleDocument10 pagesChapitre 4 Equation DifferentielleAdam LassidiPas encore d'évaluation
- Equations DifferentiellesDocument5 pagesEquations DifferentiellesZied GafsiPas encore d'évaluation
- Sec X 2004 Maths1 MPDocument4 pagesSec X 2004 Maths1 MPFritzell ASSOGBAPas encore d'évaluation
- TD1 3ma232Document7 pagesTD1 3ma232georges.mendes000Pas encore d'évaluation
- EquationsdifferentiellesDocument3 pagesEquationsdifferentiellesjoaquin6396Pas encore d'évaluation
- Equations DifférentiellesDocument3 pagesEquations Différentielleskhawlanajmi2005Pas encore d'évaluation
- C TD2Document7 pagesC TD2ghilesachour885Pas encore d'évaluation
- Corrige Ds 903Document12 pagesCorrige Ds 903zddzPas encore d'évaluation
- ch4 Equas-DiffDocument7 pagesch4 Equas-DiffSteve LegrandPas encore d'évaluation
- Chapitre 2 (Partie I) - Equations Différentielles Du Premier OrdreDocument6 pagesChapitre 2 (Partie I) - Equations Différentielles Du Premier Ordremoh kouba100% (1)
- PCSI5 Chapitre6Document14 pagesPCSI5 Chapitre6Tú Lê100% (1)
- Équations Differentielles Résumé 01Document3 pagesÉquations Differentielles Résumé 01Serinaa GuettarPas encore d'évaluation
- EquadiffDocument14 pagesEquadiffBohr DanPas encore d'évaluation
- BCPST 1 MathematiquesDocument4 pagesBCPST 1 Mathematiqueslarissakouame2001Pas encore d'évaluation
- EquadiffDocument2 pagesEquadiffHervé IddaPas encore d'évaluation
- Resume Equ DiffDocument1 pageResume Equ Diffthe knowledge is powerPas encore d'évaluation
- Partiel AmphiA 236 2023Document6 pagesPartiel AmphiA 236 2023Ibrahim CoulibalyPas encore d'évaluation
- coursTC EDO Boutin 2223Document15 pagescoursTC EDO Boutin 2223Kotia Serge-innocent DianéPas encore d'évaluation
- Workshop Séquence 5 - Equations DifférentiellesDocument7 pagesWorkshop Séquence 5 - Equations DifférentiellesBoboy YOUSSAOU ISMAILAPas encore d'évaluation
- 14-A Les Équations Différentielles Du 2ème OrdreDocument12 pages14-A Les Équations Différentielles Du 2ème OrdrelvtmathPas encore d'évaluation
- Eqdiff MPDocument9 pagesEqdiff MPAdem BRITAHPas encore d'évaluation
- Cours Equadiff Supérieur 1Document2 pagesCours Equadiff Supérieur 1L'aigle ImposantPas encore d'évaluation
- Résumé ED TraikiDocument4 pagesRésumé ED TraikihamedPas encore d'évaluation
- ChapEquations DifferentiellesDocument4 pagesChapEquations DifferentiellesYasser TkPas encore d'évaluation
- 2 Equations Différentielles Linéaires Du 1er OrdreDocument21 pages2 Equations Différentielles Linéaires Du 1er OrdrelvtmathPas encore d'évaluation
- Fiche10c CorrectionDocument14 pagesFiche10c CorrectionJere My-uPas encore d'évaluation
- Indication TD3Document3 pagesIndication TD3Omar SahriPas encore d'évaluation
- TD9 20 21Document2 pagesTD9 20 21Hamade MedPas encore d'évaluation
- LU2MA236 Examen+Corr 2022 2023Document6 pagesLU2MA236 Examen+Corr 2022 2023Ibrahim CoulibalyPas encore d'évaluation
- Fiche3 de TD MATHS 3 PDFDocument2 pagesFiche3 de TD MATHS 3 PDFКїиҩ ТсндггдPas encore d'évaluation
- Prob 7 Primitives Et Eq DiffDocument7 pagesProb 7 Primitives Et Eq Diffoussama azouiPas encore d'évaluation
- Examen L1 Découverte S1 Février 2020Document2 pagesExamen L1 Découverte S1 Février 2020You TefPas encore d'évaluation
- C3Document2 pagesC3bhtqtkvk8qPas encore d'évaluation
- TD7 9 2019 2020Document3 pagesTD7 9 2019 2020jean pierrePas encore d'évaluation
- Fiche Equa DiffDocument3 pagesFiche Equa DiffLoïc MBELE KASTHANEPas encore d'évaluation
- ANGCI1 td4 1Document2 pagesANGCI1 td4 1Jacques C.HobeikaPas encore d'évaluation
- TD6 MP-PEIP Calculus 21 Eq - DiifDocument2 pagesTD6 MP-PEIP Calculus 21 Eq - DiifjordanxvierPas encore d'évaluation
- Equadiff1 PDFDocument16 pagesEquadiff1 PDFJonathan Levy GabouPas encore d'évaluation
- Équations DifférentiellesDocument5 pagesÉquations Différentiellesismail morsliPas encore d'évaluation
- tp1 01Document2 pagestp1 01L'HungrYPas encore d'évaluation
- TD2 L3mathsDocument2 pagesTD2 L3mathsRamatou Ali KarimouPas encore d'évaluation
- 5 Equations Bernoulli Et Équations de Riccati PDFDocument9 pages5 Equations Bernoulli Et Équations de Riccati PDFIsidore OclooPas encore d'évaluation
- Equadiff 2Document23 pagesEquadiff 2jamalo90100% (1)
- Exercices À Support Concret - Mécanique Et AutomatiqueDocument27 pagesExercices À Support Concret - Mécanique Et AutomatiquesjaubertPas encore d'évaluation
- Cours EqDiffDocument7 pagesCours EqDiffsteve kamguiaPas encore d'évaluation
- Equations DifférentiellesDocument10 pagesEquations Différentiellesbadia ben abdellahPas encore d'évaluation
- BTS Cours 13 EquadiffDocument6 pagesBTS Cours 13 EquadiffAbdelhamid Dehayni AL AbdaliPas encore d'évaluation
- TD 12 Equations DifférentiellesDocument3 pagesTD 12 Equations DifférentiellesEssaidi AliPas encore d'évaluation
- QCM Outils Maths 2022Document4 pagesQCM Outils Maths 2022ikr3oukPas encore d'évaluation
- Équations différentielles: Les Grands Articles d'UniversalisD'EverandÉquations différentielles: Les Grands Articles d'UniversalisPas encore d'évaluation
- Exercices d'intégrales et d'équations intégro-différentiellesD'EverandExercices d'intégrales et d'équations intégro-différentiellesPas encore d'évaluation
- Lettre de MotivationDocument1 pageLettre de Motivationfarahzayani82Pas encore d'évaluation
- Etat Nutritionnel Adultes Anthropometrie 1Document1 pageEtat Nutritionnel Adultes Anthropometrie 1farahzayani82Pas encore d'évaluation
- Tableau Des Mesures Pour FemmesDocument3 pagesTableau Des Mesures Pour Femmesfarahzayani82Pas encore d'évaluation
- Projet IADocument29 pagesProjet IAfarahzayani82Pas encore d'évaluation
- TD Oscillateurs Électriques 2016Document9 pagesTD Oscillateurs Électriques 2016Oumar TraoréPas encore d'évaluation
- Exercice N°1 (8 Points) : Lycée: Echebbi Tadhaman Devoir de SYNTHESE N°2 ProfsDocument3 pagesExercice N°1 (8 Points) : Lycée: Echebbi Tadhaman Devoir de SYNTHESE N°2 ProfsaliPas encore d'évaluation
- Conception Et Implementation D'un Systeme Expert D'aide Au Diagnostique D'un PC-convertiDocument81 pagesConception Et Implementation D'un Systeme Expert D'aide Au Diagnostique D'un PC-convertiThierry Nacoulma100% (1)
- Interro1 - RSD - CorrigéDocument4 pagesInterro1 - RSD - CorrigéÎnēs KblPas encore d'évaluation
- 2008 09 Antilles Exo3 Correction Titrage DemiEq PKa 4ptsDocument2 pages2008 09 Antilles Exo3 Correction Titrage DemiEq PKa 4ptsNedim MsmPas encore d'évaluation
- Les Nombres Décimaux Relatifs Présentation Comparaison Et OrdreDocument4 pagesLes Nombres Décimaux Relatifs Présentation Comparaison Et Ordrewassimbenchakour25Pas encore d'évaluation
- TD 3 Microeconomie L1 S2 ToulonDocument1 pageTD 3 Microeconomie L1 S2 ToulonAbou DIENGPas encore d'évaluation
- Capital Food Services - 20220711-4607 - LimiV5Comp-V3Document4 pagesCapital Food Services - 20220711-4607 - LimiV5Comp-V3Erika MontezaPas encore d'évaluation
- RDM2 - Chapitre 2 - Différentes Méthodes de Détermination de La Déformée-1Document14 pagesRDM2 - Chapitre 2 - Différentes Méthodes de Détermination de La Déformée-1ramy yessPas encore d'évaluation
- La Mole Unite de Quantite de Matiere ExercicesDocument2 pagesLa Mole Unite de Quantite de Matiere ExercicesayoubPas encore d'évaluation
- Moteur FuséeDocument8 pagesMoteur FuséeRou Màissà100% (1)
- Cours Math - Séries Statistiques Doubles - Bac Sciences (2009-2010) MR Abdelbasset Laataoui PDFDocument10 pagesCours Math - Séries Statistiques Doubles - Bac Sciences (2009-2010) MR Abdelbasset Laataoui PDFamelll84Pas encore d'évaluation
- Reseaux de Terrain (4) (Mode de Compatibilité)Document68 pagesReseaux de Terrain (4) (Mode de Compatibilité)med.chakib1990Pas encore d'évaluation
- l3 Topo11 01Document1 pagel3 Topo11 01Nesrine HomriPas encore d'évaluation
- Dossier Complet Sur ParapsychologieDocument32 pagesDossier Complet Sur Parapsychologienicole_plante67% (3)
- Conducteurs Et Condensateurs Partie1Document38 pagesConducteurs Et Condensateurs Partie1Ismahane BenaliPas encore d'évaluation
- Séries Temporelles - Kouadio Charles EmmanuelDocument19 pagesSéries Temporelles - Kouadio Charles Emmanuelméthode RMarcPas encore d'évaluation
- Soudage Et RoulementDocument1 pageSoudage Et RoulementHaytam ArouiPas encore d'évaluation
- Extrait 42283210 PDFDocument116 pagesExtrait 42283210 PDFBousmaha YoucefPas encore d'évaluation
- DMOS11Document1 pageDMOS11sakina laabidPas encore d'évaluation
- Le BIOSDocument15 pagesLe BIOSZait NadimPas encore d'évaluation
- 1593706234502-Fiche Technique Rio Lifestyle Juin 2020Document1 page1593706234502-Fiche Technique Rio Lifestyle Juin 2020Hicham belaarsaouiPas encore d'évaluation
- Séries 2 Solutions ÉlectrolytiquesDocument1 pageSéries 2 Solutions Électrolytiquessoso.saaan777Pas encore d'évaluation
- Chapitre IIDocument13 pagesChapitre IIUlrich JordanPas encore d'évaluation
- OTNDocument2 pagesOTNHamma SaidiPas encore d'évaluation
- A5 User Manual V1.0 FRDocument12 pagesA5 User Manual V1.0 FRBENACHERINEPas encore d'évaluation
- 67NDocument10 pages67NdjebienPas encore d'évaluation
- TD d'Acoustique.L2ARCHIDocument2 pagesTD d'Acoustique.L2ARCHIPetrovich sagloire Owabira ngomaPas encore d'évaluation
- Korte Versie ReCon Walls FR Licht LRDocument12 pagesKorte Versie ReCon Walls FR Licht LRbengouaPas encore d'évaluation