Vous aimerez peut-être aussi
- Intra Ele1300 A2013 CorrigeDocument17 pagesIntra Ele1300 A2013 CorrigemohamedPas encore d'évaluation
- TD 1 (Ex Et Sol)Document18 pagesTD 1 (Ex Et Sol)Yahiyaoui Sofyane100% (1)
- Chapitre 1 SEDocument20 pagesChapitre 1 SEBadr HamedPas encore d'évaluation
- Série TFDocument3 pagesSérie TFasmaeelkortobi20Pas encore d'évaluation
- Seance1 2020Document11 pagesSeance1 2020Karym ElhoussinePas encore d'évaluation
- TD4 Corrige Dass GCV3 Ipsas-1 PDFDocument4 pagesTD4 Corrige Dass GCV3 Ipsas-1 PDFRami ZekriPas encore d'évaluation
- Phy308aA 4 C1Document18 pagesPhy308aA 4 C1yassinemPas encore d'évaluation
- FourierDocument28 pagesFourierRiad Tlemcen100% (1)
- TLM1 FourierDocument16 pagesTLM1 FourierCarel SeredjePas encore d'évaluation
- Transformée de FourierDocument18 pagesTransformée de FourierBastien Sellah100% (1)
- Cour Cme Fascicule 2bts MSP CorrigéDocument63 pagesCour Cme Fascicule 2bts MSP Corrigédogafolo2Pas encore d'évaluation
- Cours Fourier2 PDFDocument33 pagesCours Fourier2 PDFKhálêd MèdPas encore d'évaluation
- TD N3 - Ts - SolutionDocument8 pagesTD N3 - Ts - SolutionArwa RoraPas encore d'évaluation
- Cours Traitement Signal Mohamed Siala Chapitre III VF2 26 Janvier 2019 - CopieDocument96 pagesCours Traitement Signal Mohamed Siala Chapitre III VF2 26 Janvier 2019 - CopieSourour JellaliPas encore d'évaluation
- Transformee de FourierDocument18 pagesTransformee de FourierSimplicePas encore d'évaluation
- FourierDocument9 pagesFourierSafaePas encore d'évaluation
- TD ECE 2 Corrige PartielDocument4 pagesTD ECE 2 Corrige Partielsam0% (1)
- Notes de Cours INFO 2022Document108 pagesNotes de Cours INFO 2022Luc Mahop NgosPas encore d'évaluation
- Transforme de LaplaceDocument5 pagesTransforme de LaplacewwiissPas encore d'évaluation
- 4 SpectreDocument19 pages4 SpectreboucharebPas encore d'évaluation
- Cours Series de Fourrier PDFDocument28 pagesCours Series de Fourrier PDFjacob adededjiPas encore d'évaluation
- Signal14 PDFDocument9 pagesSignal14 PDFAlgerian AissaouiPas encore d'évaluation
- DS Signaux 1GE Iset Nabeul 2014Document2 pagesDS Signaux 1GE Iset Nabeul 2014Felix Chokwe Danra TaissalaPas encore d'évaluation
- Transforme de FourierDocument26 pagesTransforme de Fourierجمال سينغPas encore d'évaluation
- TD2 CorrectionDocument7 pagesTD2 CorrectionTombemine TombeminePas encore d'évaluation
- UETC2 Besnard Cours3 Master ImpulsionsDocument38 pagesUETC2 Besnard Cours3 Master ImpulsionsJefersonPas encore d'évaluation
- Correction Mathde Ling 2019Document9 pagesCorrection Mathde Ling 2019Ynes BouhelalPas encore d'évaluation
- TD1 SS PDFDocument4 pagesTD1 SS PDFMouad ImzouraPas encore d'évaluation
- Laplace 2008 Serie 5Document4 pagesLaplace 2008 Serie 5FAKEHI EL KHAILIPas encore d'évaluation
- Chapitre 4 Cours PLLDocument10 pagesChapitre 4 Cours PLLpc hpPas encore d'évaluation
- Réponse D'un Système LineaireDocument27 pagesRéponse D'un Système LineaireanasPas encore d'évaluation
- Corrig EpreuveDocument9 pagesCorrig EpreuvesalahPas encore d'évaluation
- Chap 2Document10 pagesChap 2amaniPas encore d'évaluation
- Corrigé Epreuve TAS M1 S1 RT 2018Document9 pagesCorrigé Epreuve TAS M1 S1 RT 2018Sawat SiwarPas encore d'évaluation
- Laplace PDFDocument6 pagesLaplace PDFyounesPas encore d'évaluation
- Transformation de Laplace CmeDocument50 pagesTransformation de Laplace Cmekoffi gerardPas encore d'évaluation
- Chap5 Modulation PCM GEL3006 2015 PDFDocument28 pagesChap5 Modulation PCM GEL3006 2015 PDFSamiIaalouPas encore d'évaluation
- Transformée de LaplaceDocument30 pagesTransformée de LaplaceAnouar Alaa-Eddine BenaïdaPas encore d'évaluation
- Chapitre 4 TS - S4Document14 pagesChapitre 4 TS - S4Mounia AJDOURPas encore d'évaluation
- Transp Fourier O-LeyDocument20 pagesTransp Fourier O-LeyMazama-Esso Moddoh OclooPas encore d'évaluation
- Trans ZDocument7 pagesTrans ZTouta MedPas encore d'évaluation
- Transp Fourier O-LeyDocument20 pagesTransp Fourier O-LeyHamdi GdhamiPas encore d'évaluation
- Exam1 1998Document2 pagesExam1 1998Hachem EmptyPas encore d'évaluation
- Examen Final SLC CorrigéDocument3 pagesExamen Final SLC CorrigéNadir SaoudiPas encore d'évaluation
- Régulation Industrielle 1 2GIDocument15 pagesRégulation Industrielle 1 2GISoufiane SajidPas encore d'évaluation
- Chap 3Document13 pagesChap 3Grira SaharPas encore d'évaluation
- TD 2Document2 pagesTD 2Ihssan KH0% (1)
- FourierDocument9 pagesFourierMohamed RbihiPas encore d'évaluation
- RESUME AutomatiqueDocument4 pagesRESUME AutomatiquesarahadPas encore d'évaluation
- Transformation de SignauxDocument3 pagesTransformation de SignauxdjelbouPas encore d'évaluation
- D Iris2 05Document4 pagesD Iris2 05dekelwefePas encore d'évaluation
- TD2 SALC GabourDocument4 pagesTD2 SALC Gabourachelirayane7Pas encore d'évaluation
- Résumé Asservissement SIDocument20 pagesRésumé Asservissement SIBalalaŇaŖîf100% (7)
- 126 Resume Asserv 2020 PDFDocument20 pages126 Resume Asserv 2020 PDFafif ikramePas encore d'évaluation
- Chapitre 3 PDFDocument10 pagesChapitre 3 PDFTidiane TallPas encore d'évaluation
- TD 04Document2 pagesTD 04Abdou HarchePas encore d'évaluation
- Ch3 Trans Laplace Maths3Document13 pagesCh3 Trans Laplace Maths3si salem tassaditPas encore d'évaluation
- Leçons sur les séries trigonométriques : professées au Collège de FranceD'EverandLeçons sur les séries trigonométriques : professées au Collège de FrancePas encore d'évaluation
- Analyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2D'EverandAnalyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2Pas encore d'évaluation
- Équations différentielles: Les Grands Articles d'UniversalisD'EverandÉquations différentielles: Les Grands Articles d'UniversalisPas encore d'évaluation
- LagrangeDocument2 pagesLagrangeselmaaaab2703Pas encore d'évaluation
- PB RecDocument2 pagesPB Recselmaaaab2703Pas encore d'évaluation
- Exercice (Etude D'Un Asservissement Échantillonné) .: NT CNTMNTDocument2 pagesExercice (Etude D'Un Asservissement Échantillonné) .: NT CNTMNTselmaaaab2703Pas encore d'évaluation
- Seecs S2 Exam 1Document1 pageSeecs S2 Exam 1selmaaaab2703Pas encore d'évaluation
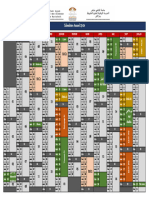
- Calendrier 23-24Document1 pageCalendrier 23-24selmaaaab2703Pas encore d'évaluation
- ObjetDocument1 pageObjetselmaaaab2703Pas encore d'évaluation
- Projet de La DrogueDocument5 pagesProjet de La Drogueselmaaaab2703Pas encore d'évaluation
- SlidesSL 1Document35 pagesSlidesSL 1montassar azzouzPas encore d'évaluation
- 1C Theme 1 PDFDocument20 pages1C Theme 1 PDFphilippe dmtPas encore d'évaluation
- TD2 Analyse3 Limites FctsDocument2 pagesTD2 Analyse3 Limites FctsPrince HoungbassePas encore d'évaluation
- 1 Re S Cours Sur Approche Intuitive Des LimitesDocument5 pages1 Re S Cours Sur Approche Intuitive Des LimitesBassirou DiopPas encore d'évaluation
- Analyse 2 Les Integrales Et Les Equa DiffDocument43 pagesAnalyse 2 Les Integrales Et Les Equa Diffkader100% (1)
- La Methode Element FiniDocument24 pagesLa Methode Element Finimarlot GnomePas encore d'évaluation
- Annexe1 MathAppli 1aDocument30 pagesAnnexe1 MathAppli 1aRomain MeurantPas encore d'évaluation
- Chap3-Opérations Sur Les FractionsDocument4 pagesChap3-Opérations Sur Les Fractionsnaababaongo052Pas encore d'évaluation
- Cours AUT AS M1 SNL PDFDocument12 pagesCours AUT AS M1 SNL PDFChaouki MessasmaPas encore d'évaluation
- S3 CoursDocument29 pagesS3 CoursOYAMB'S InstitutPas encore d'évaluation
- TD1 Méthode NumériqueDocument1 pageTD1 Méthode NumériqueJean Oscar BadoPas encore d'évaluation
- Formulaire TrigoDocument4 pagesFormulaire TrigoEric Leger100% (1)
- C00 Masse Et Inertie Des SolidesDocument5 pagesC00 Masse Et Inertie Des SolidesMarc SalettePas encore d'évaluation
- Cours Produit Scalaire-Version ProfDocument4 pagesCours Produit Scalaire-Version Profmeriemmansour777Pas encore d'évaluation
- Exercice CorrigéDocument7 pagesExercice CorrigéAmira Ayari100% (1)
- Cours MecaniqueDocument26 pagesCours MecaniqueMeryem JabranePas encore d'évaluation
- MMC Chap6 PDFDocument16 pagesMMC Chap6 PDFAmd JedPas encore d'évaluation
- Ds 2 Moulay YoussefDocument4 pagesDs 2 Moulay Youssefcopie masterPas encore d'évaluation
- Chapitre 6Document24 pagesChapitre 6HoucinePas encore d'évaluation
- Méthodes NumériquesDocument76 pagesMéthodes Numériquesأبو كعب علاء الدينPas encore d'évaluation
- QuaterDocument3 pagesQuaterMustapha AzahraouiPas encore d'évaluation
- TDGeometriePlane CorrigeDocument16 pagesTDGeometriePlane CorrigeAchraf LachariiPas encore d'évaluation
- CNC 2003 PSI Maths 2Document4 pagesCNC 2003 PSI Maths 2Outzeroualt ZakariaPas encore d'évaluation
- Pratique Matrice (AD)Document2 pagesPratique Matrice (AD)hanae elharounPas encore d'évaluation
- Chapitre IV - Équations D'équilibre Dynamique Par La M.E.F.Document13 pagesChapitre IV - Équations D'équilibre Dynamique Par La M.E.F.HamidPas encore d'évaluation
- Cours 2 NdeDocument105 pagesCours 2 Ndemathonautes100% (1)
- Rapport 2015Document176 pagesRapport 2015Floriane DardardPas encore d'évaluation
- AL7MA12TEPA0111 Corriges Des Exercices Partie 02Document116 pagesAL7MA12TEPA0111 Corriges Des Exercices Partie 02AnkenyPas encore d'évaluation
- AngleDocument6 pagesAngleNathalie WagnerPas encore d'évaluation