Vous aimerez peut-être aussi
- Cours LaplaceDocument14 pagesCours LaplaceDjil DatPas encore d'évaluation
- Cour Cme Fascicule 2bts MSP CorrigéDocument63 pagesCour Cme Fascicule 2bts MSP Corrigédogafolo2Pas encore d'évaluation
- Fascicule 2bts IndustrielleDocument92 pagesFascicule 2bts IndustrielleYattePas encore d'évaluation
- Transformation de Laplace CmeDocument50 pagesTransformation de Laplace Cmekoffi gerardPas encore d'évaluation
- Transformation de LaplaceDocument17 pagesTransformation de LaplaceMouhanned bouteraaPas encore d'évaluation
- Serie TD 1Document2 pagesSerie TD 1amhPas encore d'évaluation
- Concours Commun Polytechniques (CCINP) 2004 PSI Mathématiques 1 EaDocument4 pagesConcours Commun Polytechniques (CCINP) 2004 PSI Mathématiques 1 EaLoubaba MHPas encore d'évaluation
- Exo Trans de LaplaceDocument2 pagesExo Trans de Laplaceنزاري إتبارPas encore d'évaluation
- Solution td1Document9 pagesSolution td1Khalil elkPas encore d'évaluation
- Poly 1 TD Traitement Du SignalDocument7 pagesPoly 1 TD Traitement Du SignalMechergui FakhriPas encore d'évaluation
- Laplace 2008 Serie 5Document4 pagesLaplace 2008 Serie 5FAKEHI EL KHAILIPas encore d'évaluation
- Tla PlaceDocument10 pagesTla PlaceAliOucharPas encore d'évaluation
- TL FormatecDocument12 pagesTL FormatecMaurice HALOU-ETCHADEOUPas encore d'évaluation
- TD N 1 Convolution Et Correlation ElemenDocument7 pagesTD N 1 Convolution Et Correlation ElemenRIFAI YASSINEPas encore d'évaluation
- TD N3 - Ts - SolutionDocument8 pagesTD N3 - Ts - SolutionArwa RoraPas encore d'évaluation
- MVA101-Final2008 CorrectionDocument7 pagesMVA101-Final2008 CorrectionPeter El BabaPas encore d'évaluation
- FourierDocument28 pagesFourierRiad Tlemcen100% (1)
- Transformation de Laplace 2021Document14 pagesTransformation de Laplace 2021Msadak AnasPas encore d'évaluation
- Transforme de FourierDocument26 pagesTransforme de Fourierجمال سينغPas encore d'évaluation
- Fiche Transformée de Laplace 2010-2011 RDocument4 pagesFiche Transformée de Laplace 2010-2011 RRodrigue patrice Njounhassi koagnePas encore d'évaluation
- Valeur MoyenneDocument4 pagesValeur MoyenneKamal KaabouchPas encore d'évaluation
- Fonctions Vectorielles Et Courbes Parametrees TSI2 PDFDocument20 pagesFonctions Vectorielles Et Courbes Parametrees TSI2 PDFkh4y3mPas encore d'évaluation
- L1 Meca TD1 HypothesesGrandeursVariationsDocument3 pagesL1 Meca TD1 HypothesesGrandeursVariationsNguyễn Minh ĐứcPas encore d'évaluation
- 1 Transformation de Fourier: 1.1 Int Egrales D Ependant D'un Param' EtreDocument9 pages1 Transformation de Fourier: 1.1 Int Egrales D Ependant D'un Param' EtreSana BakhdilPas encore d'évaluation
- Outils Pour Le Calcul Scientifique Correction D'exercicesDocument12 pagesOutils Pour Le Calcul Scientifique Correction D'exercicesgaetan vetsoupePas encore d'évaluation
- BUT1 Transformee Laplace ArticleDocument4 pagesBUT1 Transformee Laplace ArticleBenPas encore d'évaluation
- Série de TF Avec SolutionsDocument14 pagesSérie de TF Avec SolutionsMouloud FerroukhiPas encore d'évaluation
- Controle 2021Document2 pagesControle 2021Mostafa BelaaroussiPas encore d'évaluation
- Pack LaplaceDocument6 pagesPack Laplacemg74z2g9qxPas encore d'évaluation
- Chapitre 17Document26 pagesChapitre 17antoninboyavalPas encore d'évaluation
- Td12 Densite CorrigeDocument25 pagesTd12 Densite CorrigeYves BeaudouinPas encore d'évaluation
- TD2 SALC GabourDocument4 pagesTD2 SALC Gabourachelirayane7Pas encore d'évaluation
- Cours de Math Ing-79Document1 pageCours de Math Ing-79Hafsa LamrabatPas encore d'évaluation
- Transformée de LaplaceDocument30 pagesTransformée de LaplaceAnouar Alaa-Eddine BenaïdaPas encore d'évaluation
- Laplace 2008Document39 pagesLaplace 2008Hassna BounouaderPas encore d'évaluation
- TDLap 1Document2 pagesTDLap 1Antipas Komi Mawuli AziawaPas encore d'évaluation
- Exo Chap3 - NewDocument2 pagesExo Chap3 - Newsfwbx6wdz9Pas encore d'évaluation
- Transformée de Fourier: Exercice 1Document2 pagesTransformée de Fourier: Exercice 1Salma NPas encore d'évaluation
- TD ECE 2 Corrige PartielDocument4 pagesTD ECE 2 Corrige Partielsam0% (1)
- Feuille 3Document15 pagesFeuille 3Emy ManiPas encore d'évaluation
- Ds 1603Document4 pagesDs 1603Info-Tech - ديما ديما للمعلومياتPas encore d'évaluation
- S4 - TD3 - Courbes Du PlanDocument4 pagesS4 - TD3 - Courbes Du PlanilanbruskiPas encore d'évaluation
- L1 Meca TD1 DerivationUneVariable CorrectionDocument2 pagesL1 Meca TD1 DerivationUneVariable CorrectionNguyễn Minh ĐứcPas encore d'évaluation
- TD4 LaplaceDocument8 pagesTD4 LaplaceŒū Ssa MēPas encore d'évaluation
- Transforme de LaplaceDocument5 pagesTransforme de LaplacewwiissPas encore d'évaluation
- Chapitre 2Document7 pagesChapitre 2selmaaaab2703Pas encore d'évaluation
- Courbes Paramétrées: 1.1 RappelsDocument11 pagesCourbes Paramétrées: 1.1 RappelsOlivier BainaPas encore d'évaluation
- Taik Cours3 TL TFDocument20 pagesTaik Cours3 TL TFaityahiamassyliaPas encore d'évaluation
- Exercices CorrigeDocument14 pagesExercices CorrigeFarah Alameddine100% (2)
- TD LaplaceDocument2 pagesTD LaplaceOussama EssaïfiPas encore d'évaluation
- Analyse SpectraleDocument1 pageAnalyse SpectralemohamadouPas encore d'évaluation
- Transformation de FourierDocument2 pagesTransformation de FourierMohamed Es-sarghiniPas encore d'évaluation
- Examen Final SLC CorrigéDocument3 pagesExamen Final SLC CorrigéNadir SaoudiPas encore d'évaluation
- Draft: Exercice 1Document7 pagesDraft: Exercice 1mouminekamagate18Pas encore d'évaluation
- Leçons sur les séries trigonométriques : professées au Collège de FranceD'EverandLeçons sur les séries trigonométriques : professées au Collège de FrancePas encore d'évaluation
- Analyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2D'EverandAnalyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2Pas encore d'évaluation
- Annales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésD'EverandAnnales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- Équations différentielles: Les Grands Articles d'UniversalisD'EverandÉquations différentielles: Les Grands Articles d'UniversalisPas encore d'évaluation
- Symphonie FRDocument1 pageSymphonie FRsi salem tassaditPas encore d'évaluation
- Recettes: Sorbets Et Glaces Italiennes: Magic Mix NeutreDocument2 pagesRecettes: Sorbets Et Glaces Italiennes: Magic Mix Neutresi salem tassaditPas encore d'évaluation
- Enseditions 3726Document521 pagesEnseditions 3726si salem tassaditPas encore d'évaluation
- EMPLOI DU TEMPS Licence Semestre 1 2022-2023-Avec TDDocument8 pagesEMPLOI DU TEMPS Licence Semestre 1 2022-2023-Avec TDsi salem tassaditPas encore d'évaluation
- EMPLOI DU TEMPS Master Semestre 1 2022-2023-ActualiséDocument22 pagesEMPLOI DU TEMPS Master Semestre 1 2022-2023-Actualisési salem tassaditPas encore d'évaluation
- CheesecakeDocument1 pageCheesecakesi salem tassaditPas encore d'évaluation
- Master Classe Buffets SalésDocument16 pagesMaster Classe Buffets Saléssi salem tassaditPas encore d'évaluation
- Reclamation en LigneDocument1 pageReclamation en Lignesi salem tassaditPas encore d'évaluation
- Notes CDS L3 G.CDocument16 pagesNotes CDS L3 G.Csi salem tassaditPas encore d'évaluation
- Remise (PFC Cao)Document1 pageRemise (PFC Cao)si salem tassaditPas encore d'évaluation
- Résumé Cours M4Document6 pagesRésumé Cours M4si salem tassaditPas encore d'évaluation
- Cours Projeté 2021-2022Document244 pagesCours Projeté 2021-2022si salem tassaditPas encore d'évaluation
- Notes TP MDS (L3 GC)Document1 pageNotes TP MDS (L3 GC)si salem tassaditPas encore d'évaluation
- Seance de Rattrapage l3 Section A (Module CM)Document1 pageSeance de Rattrapage l3 Section A (Module CM)si salem tassaditPas encore d'évaluation
- Avis Aux Etudiants l3 Genie CivilDocument1 pageAvis Aux Etudiants l3 Genie Civilsi salem tassaditPas encore d'évaluation
- F.L2 Dettes GC MNDocument5 pagesF.L2 Dettes GC MNsi salem tassaditPas encore d'évaluation
- 2.L3 GC (Nouveaux + Répétitifs)Document16 pages2.L3 GC (Nouveaux + Répétitifs)si salem tassaditPas encore d'évaluation
- I.l2 Dettes GC MDS1Document7 pagesI.l2 Dettes GC MDS1si salem tassaditPas encore d'évaluation
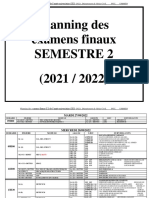
- Examens Finaux S2 (2021-2022)Document8 pagesExamens Finaux S2 (2021-2022)si salem tassaditPas encore d'évaluation
- G.L2 Dettes GC RDM1Document4 pagesG.L2 Dettes GC RDM1si salem tassaditPas encore d'évaluation
- Dzexams 2ap Francais 932856Document4 pagesDzexams 2ap Francais 932856si salem tassaditPas encore d'évaluation
- H.L2 Dettes GC Maths 4Document7 pagesH.L2 Dettes GC Maths 4si salem tassaditPas encore d'évaluation
- Dzexams 2ap Francais 689053Document4 pagesDzexams 2ap Francais 689053si salem tassaditPas encore d'évaluation
- Avant ProposDocument1 pageAvant Propossi salem tassaditPas encore d'évaluation
- Dzexams 2ap Francais 588930Document4 pagesDzexams 2ap Francais 588930si salem tassaditPas encore d'évaluation
- Dzexams 2ap Francais 908993Document4 pagesDzexams 2ap Francais 908993si salem tassaditPas encore d'évaluation
- Rattrapage S1 (2021-2022)Document7 pagesRattrapage S1 (2021-2022)si salem tassaditPas encore d'évaluation
- Corrigé Fondations Et Ouvrage GéotechniquesDocument9 pagesCorrigé Fondations Et Ouvrage Géotechniquessi salem tassaditPas encore d'évaluation
- Dzexams 2ap Francais 1091893Document4 pagesDzexams 2ap Francais 1091893si salem tassaditPas encore d'évaluation
- Dzexams 2ap Francais 367909Document4 pagesDzexams 2ap Francais 367909si salem tassaditPas encore d'évaluation
- Correction Serie1 Algèbre6 SMA S4Document6 pagesCorrection Serie1 Algèbre6 SMA S4ahmed ibn chahidPas encore d'évaluation
- Cours (Calcul Littéral Partie2) 3èmeDocument4 pagesCours (Calcul Littéral Partie2) 3èmeLola PocketPas encore d'évaluation
- Situation D'évaluation: TexteDocument4 pagesSituation D'évaluation: TexteJose BankolePas encore d'évaluation
- Plus Courts CheminsDocument24 pagesPlus Courts Cheminswouendeu yvanPas encore d'évaluation
- Fonction Reciproque Resume de Cours 2 3Document2 pagesFonction Reciproque Resume de Cours 2 3jesserkacharPas encore d'évaluation
- Cours Equations Differentielles Du Premier OrdreDocument6 pagesCours Equations Differentielles Du Premier OrdreAkram OmariPas encore d'évaluation
- Travail Pratique: Méthode de Corrélation.Document12 pagesTravail Pratique: Méthode de Corrélation.Ais KaratshiPas encore d'évaluation
- Essentiel ExpDocument1 pageEssentiel ExpAbdelmalkPas encore d'évaluation
- Calcul Integral Cours 1 3Document8 pagesCalcul Integral Cours 1 3Mohamed TdPas encore d'évaluation
- TD MEF 2021 - Série 2Document6 pagesTD MEF 2021 - Série 2Naima NaPas encore d'évaluation
- Estimation Detection 17-18 FINAL PDFDocument2 pagesEstimation Detection 17-18 FINAL PDFzeineb ghobel100% (1)
- TP 1 - Etude Et Commande Des Systèmes NumériquesDocument4 pagesTP 1 - Etude Et Commande Des Systèmes Numériquesmoulay moulayPas encore d'évaluation
- Algebre TD PDFDocument18 pagesAlgebre TD PDFmeli DasPas encore d'évaluation
- Compacts GLN (R)Document2 pagesCompacts GLN (R)Amin ZekriPas encore d'évaluation
- ch01 Generalites FonctionsDocument5 pagesch01 Generalites FonctionsOttis EmeraudePas encore d'évaluation
- 121 Exercices Derivation PDFDocument3 pages121 Exercices Derivation PDFsubulataPas encore d'évaluation
- CH 1Document26 pagesCH 1HAMZA KANANEPas encore d'évaluation
- Rayprogr PDFDocument16 pagesRayprogr PDFMustapha BeramiPas encore d'évaluation
- Loi Des Grands Nombres Et Theoreme Central LimiteDocument22 pagesLoi Des Grands Nombres Et Theoreme Central LimiteAnonymous Gh7ZPrPas encore d'évaluation
- 005 Optimisation de La Chaine Logistique Benqlilou 2012 PDFDocument112 pages005 Optimisation de La Chaine Logistique Benqlilou 2012 PDFAnass Cherrafi100% (1)
- Analyse Des Circuits en Regime TransitoireDocument14 pagesAnalyse Des Circuits en Regime TransitoireMossafir MossafirPas encore d'évaluation
- Série CompléxeDocument4 pagesSérie CompléxeRajhiHoussemPas encore d'évaluation
- Cours MathematicaDocument32 pagesCours MathematicaHatem MOKHTARIPas encore d'évaluation
- Examen 2 Ro QcuDocument1 pageExamen 2 Ro QcuZineb FadlanePas encore d'évaluation
- Examen Final Math4 2020Document4 pagesExamen Final Math4 2020Boubacar Moussa KodoPas encore d'évaluation
- 6 Analyse Fourier - Ondes Dim 2 Et 3 - 2ndsem2017-2018Document26 pages6 Analyse Fourier - Ondes Dim 2 Et 3 - 2ndsem2017-2018book readerPas encore d'évaluation
- Cours-2-Formes Différentielles Notion de ChampDocument6 pagesCours-2-Formes Différentielles Notion de ChampBrahim NéciraPas encore d'évaluation
- Cours D - Algèbre 1Document91 pagesCours D - Algèbre 1maoukil ayoubPas encore d'évaluation
- Introduction Aux Probabilités Et À La StatistiqueDocument400 pagesIntroduction Aux Probabilités Et À La Statistiquebenaouda31Pas encore d'évaluation