Vous aimerez peut-être aussi
- Électrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsD'EverandÉlectrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Photovoltaïque | pas à pas: Le guide pratique pour débutants pour la conception d'une installation PVD'EverandPhotovoltaïque | pas à pas: Le guide pratique pour débutants pour la conception d'une installation PVPas encore d'évaluation
- Transformateur À Semi-Conducteurs: Révolutionner le réseau électrique pour la qualité de l'électricité et l'efficacité énergétiqueD'EverandTransformateur À Semi-Conducteurs: Révolutionner le réseau électrique pour la qualité de l'électricité et l'efficacité énergétiquePas encore d'évaluation
- Livre de L'interne - HématologieDocument738 pagesLivre de L'interne - HématologieMed100% (1)
- Electronique de PuissanceDocument12 pagesElectronique de PuissanceN.NASRI Matlablog88% (8)
- OnduleursDocument25 pagesOnduleursFatima100% (1)
- L'Électricité - Découvreurs et Inventeurs: Tome IVD'EverandL'Électricité - Découvreurs et Inventeurs: Tome IVÉvaluation : 3 sur 5 étoiles3/5 (2)
- Système de Pompage Solaire PFE 2020Document37 pagesSystème de Pompage Solaire PFE 2020issam hmaimessaPas encore d'évaluation
- L'électricité - Découvreurs et Inventeurs: Tome IID'EverandL'électricité - Découvreurs et Inventeurs: Tome IIÉvaluation : 5 sur 5 étoiles5/5 (1)
- Exercices Hacheur PDFDocument2 pagesExercices Hacheur PDFSarah33% (6)
- Electronique de PuissanceDocument69 pagesElectronique de Puissanceartust83% (6)
- TP1 Etude Realisation Alimentation StabiliseeDocument7 pagesTP1 Etude Realisation Alimentation Stabiliseehamzalabbou100% (5)
- TD Onduleurs Triphasé SEER2Document9 pagesTD Onduleurs Triphasé SEER2ÀLì BkPas encore d'évaluation
- Cours Electronique de PuissanceDocument14 pagesCours Electronique de Puissanceimane mazPas encore d'évaluation
- Cours Master2 ChapitreIDocument18 pagesCours Master2 ChapitreIerenoPas encore d'évaluation
- Onduleurs Triphasés PDFDocument6 pagesOnduleurs Triphasés PDFOmar 95100% (1)
- TP OnduleurDocument7 pagesTP Onduleurroze merryPas encore d'évaluation
- Chapitre 16 Redressement Non CommandéDocument13 pagesChapitre 16 Redressement Non CommandéLokmane Abada100% (5)
- CHAP 2-Techniques de Commande À Vitesse Variable Des MCCDocument60 pagesCHAP 2-Techniques de Commande À Vitesse Variable Des MCCRania MfarrejPas encore d'évaluation
- TP3 Hamani Fatima PDFDocument13 pagesTP3 Hamani Fatima PDFSa Rah100% (1)
- Cours Convertisseur StatiqueDocument34 pagesCours Convertisseur Statiquerachida zounaibiPas encore d'évaluation
- Commande MLI de L Onduleur MonophaseDocument12 pagesCommande MLI de L Onduleur MonophaseChafik Mbarek100% (2)
- ChapitreVI Les OnduleursDocument5 pagesChapitreVI Les OnduleursCaterina CasielloPas encore d'évaluation
- Minhaj SalafiDocument18 pagesMinhaj SalafisososopiPas encore d'évaluation
- Électronique de PuissanceDocument70 pagesÉlectronique de PuissanceAurelien Christ L'angePas encore d'évaluation
- TP Hacheur RedresseurDocument5 pagesTP Hacheur RedresseurBounegab YoucefPas encore d'évaluation
- Modélisation de L - Onduleur de TensionDocument14 pagesModélisation de L - Onduleur de Tensionfarid saadPas encore d'évaluation
- Cours OnduleurDocument7 pagesCours Onduleurmasmoudimohamed50% (2)
- Electronique de PuissanceDocument1 pageElectronique de Puissancehalim otmanePas encore d'évaluation
- La DouleurDocument14 pagesLa DouleurSamantha Francisco RossettiPas encore d'évaluation
- Modélisation Et Commande Les Convertisseurs DC-DC Et DC-AC2Document26 pagesModélisation Et Commande Les Convertisseurs DC-DC Et DC-AC2Ayache IsmaëlPas encore d'évaluation
- Essai SPT Arvor 2010Document1 pageEssai SPT Arvor 2010Seif EddinePas encore d'évaluation
- Gestion Des Déchets 22223 1 PDFDocument101 pagesGestion Des Déchets 22223 1 PDFbehdenna riyanaPas encore d'évaluation
- 5 - Association Convertisseur - Moteur À Courant ContinuDocument54 pages5 - Association Convertisseur - Moteur À Courant Continurajaa latifi100% (1)
- HacheurDocument13 pagesHacheurMustapha BeziouiPas encore d'évaluation
- Electronique de Puissance L2 S2Document74 pagesElectronique de Puissance L2 S2Sofiane BePas encore d'évaluation
- LC 21-080Document4 pagesLC 21-080Simon HoudePas encore d'évaluation
- Redresseur CDocument24 pagesRedresseur CMoundir Bachir Elezaar100% (1)
- OnduleurDocument17 pagesOnduleurGrine Salah Eddine100% (1)
- EP Convertisseurs Chap-4 1 RedresseursDocument40 pagesEP Convertisseurs Chap-4 1 RedresseursZINEB AZ0% (1)
- TP Redressement Monophasé CommandéDocument2 pagesTP Redressement Monophasé CommandéKA DIPas encore d'évaluation
- Association Convertisseurs Statiques Machines ElectriquesDocument16 pagesAssociation Convertisseurs Statiques Machines Electriquestayeb de100% (1)
- Chap - 1 INTERRUPTEURS SEMI-CONDUCTEURS DE PUISSANCE (Mode de Compatibilité)Document16 pagesChap - 1 INTERRUPTEURS SEMI-CONDUCTEURS DE PUISSANCE (Mode de Compatibilité)Wassim GtmoPas encore d'évaluation
- Thierry LEQUEU Travaux Dirigés MC-ET3 IUT de Tours - 2 Année Département GEIIDocument12 pagesThierry LEQUEU Travaux Dirigés MC-ET3 IUT de Tours - 2 Année Département GEIIIssam Boujnane100% (1)
- Rapport de TP S2 Composant de PuissanceDocument16 pagesRapport de TP S2 Composant de PuissanceTaha HousbaniPas encore d'évaluation
- Cours OnduleurDocument4 pagesCours OnduleurAymen Chaaira50% (2)
- Demarreur Progressif Gradateur Angle de Phase PDFDocument3 pagesDemarreur Progressif Gradateur Angle de Phase PDFHous SamPas encore d'évaluation
- Tp3 Redresseur Monophase CommandeDocument5 pagesTp3 Redresseur Monophase CommandeRajhiHoussemPas encore d'évaluation
- TP Commande D'une Machine À Courant Continu1Document9 pagesTP Commande D'une Machine À Courant Continu1OkbaPas encore d'évaluation
- ElpDocument141 pagesElpHØu ÇîNe100% (1)
- Gradateur 3phDocument9 pagesGradateur 3phAbdellatif El Haddajy0% (2)
- TPN 1Document4 pagesTPN 1Abderrahmane WrPas encore d'évaluation
- Redressement TriphaseDocument6 pagesRedressement TriphaseAymen Hssaini100% (1)
- Mge 00051Document53 pagesMge 00051أبو كعب علاء الدينPas encore d'évaluation
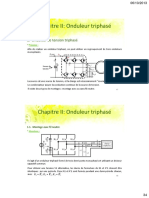
- Chpitre II Onduleur TriphaseDocument19 pagesChpitre II Onduleur TriphaseYoucef Medjaouri100% (1)
- Gradateur 01Document16 pagesGradateur 01najim6850% (2)
- TP #1 Redressement Monophasé Non CommandéDocument10 pagesTP #1 Redressement Monophasé Non CommandéLo LoPas encore d'évaluation
- Redresseur CommandeDocument13 pagesRedresseur Commandeotaku100% (2)
- EP CoursDocument126 pagesEP CoursBensalemPas encore d'évaluation
- Electr de Puiss Conver AC-DC Et AC-ACDocument52 pagesElectr de Puiss Conver AC-DC Et AC-ACJérémie John junior Koumba obidiasoPas encore d'évaluation
- Electronique de PuissanceDocument4 pagesElectronique de PuissanceNOURDINE EZZALMADIPas encore d'évaluation
- Support de Cours Partie 1Document19 pagesSupport de Cours Partie 1Lemjid YesminePas encore d'évaluation
- Chapitre 1 & 2 Hacheurs - Complet - Cours Electroniq - 240109 - 161054Document137 pagesChapitre 1 & 2 Hacheurs - Complet - Cours Electroniq - 240109 - 161054azzeddine tantaouiPas encore d'évaluation
- Etude de Circuit de Commande Et de Puissance D'un Redresseur1Document31 pagesEtude de Circuit de Commande Et de Puissance D'un Redresseur1Nabil Ark100% (3)
- Pancreatite ÉemDocument8 pagesPancreatite ÉemInfirmier Santé PubliquePas encore d'évaluation
- Le Figaro PDFDocument3 pagesLe Figaro PDFemilie dos santosPas encore d'évaluation
- 2 - Épreuve 02 - Le SéismeDocument3 pages2 - Épreuve 02 - Le SéismeLįllÿ LįllÿPas encore d'évaluation
- Catalogue Reles ADocument44 pagesCatalogue Reles AMohammedPas encore d'évaluation
- RB SCCDDocument36 pagesRB SCCDsirovic90Pas encore d'évaluation
- TD 03 CorrigéDocument5 pagesTD 03 CorrigéTaimocha FatiPas encore d'évaluation
- MQS Science XIthDocument127 pagesMQS Science XIthKrishna KumarPas encore d'évaluation
- Perception Et IllusionDocument3 pagesPerception Et IllusionSelma AddaPas encore d'évaluation
- Manuel Qualité Agro-AlimentaireDocument16 pagesManuel Qualité Agro-AlimentaireSambouPas encore d'évaluation
- RapportDocument25 pagesRapportMolka Ayechi100% (1)
- BAROKA Mémoire Tourisme 2016Document127 pagesBAROKA Mémoire Tourisme 2016Josué BAROKA100% (1)
- 3 - CCTP Ouvrage Oued GabesDocument14 pages3 - CCTP Ouvrage Oued GabesqsegaqgPas encore d'évaluation
- CAT EASY Catalogue e Sy PDFDocument20 pagesCAT EASY Catalogue e Sy PDFReda NariPas encore d'évaluation
- TD Solution SYSTEME ENDOMEMBRANAIREDocument2 pagesTD Solution SYSTEME ENDOMEMBRANAIREahmedPas encore d'évaluation
- Sikadur® Injection LP: Fiche ProduitDocument3 pagesSikadur® Injection LP: Fiche Produitabdelali baaddouchPas encore d'évaluation
- Preuve Ponctuelle Obligatoire Eps - Bac GT - Livret Candidat - Tennis de Table - 2024 15860Document6 pagesPreuve Ponctuelle Obligatoire Eps - Bac GT - Livret Candidat - Tennis de Table - 2024 15860moussaidiabdouPas encore d'évaluation
- Axtem Mag PRINTEMPS 2012Document16 pagesAxtem Mag PRINTEMPS 2012MTS_47Pas encore d'évaluation
- Avoir Des Loisirs Dans Un Espace UrbainDocument2 pagesAvoir Des Loisirs Dans Un Espace UrbainonerPas encore d'évaluation
- Chapitre 3 - Présentation - Loi 13-83Document53 pagesChapitre 3 - Présentation - Loi 13-83BENHIBA WAFAEPas encore d'évaluation
- Investir Dans Le Secteur Fruits Et Legumes Du MaliDocument23 pagesInvestir Dans Le Secteur Fruits Et Legumes Du MaliGregory MaigaPas encore d'évaluation
- Introduction À La Prothèse Partielle FixeDocument42 pagesIntroduction À La Prothèse Partielle FixeBit CoyinPas encore d'évaluation
- Rapport2 G2Document8 pagesRapport2 G2ahmedPas encore d'évaluation
- Zaaf Kerrouche - 2020Document64 pagesZaaf Kerrouche - 2020OUSSAMA BEN OMARPas encore d'évaluation