Vous aimerez peut-être aussi
- Grafcet PDFDocument49 pagesGrafcet PDFEdmond OuattaraPas encore d'évaluation
- KKKKKKKKKKDocument4 pagesKKKKKKKKKKAbderrahmane WardiPas encore d'évaluation
- PDFDocument34 pagesPDFkjjPas encore d'évaluation
- Automates Programmables IndustrielsDocument16 pagesAutomates Programmables Industrielsmedjdoub100% (1)
- Automatisme Combinatoire Version 4Document1 pageAutomatisme Combinatoire Version 4Khaled OuniPas encore d'évaluation
- 18 CapteursDocument9 pages18 CapteursRudy ValéryPas encore d'évaluation
- Cours Grafcet - Les Notions de BaseDocument10 pagesCours Grafcet - Les Notions de BaseBessem Zagalia100% (1)
- 2 Systeme Sequentiels Eleve Grafcet SequenceurDocument6 pages2 Systeme Sequentiels Eleve Grafcet SequenceurAhmed BelhadjPas encore d'évaluation
- 01 - Séminaire API TELEMECANIQUE - GE-FF-S01 PDFDocument111 pages01 - Séminaire API TELEMECANIQUE - GE-FF-S01 PDFLotfi ElaoudPas encore d'évaluation
- Materéalisation GRAFCET EleveDocument46 pagesMateréalisation GRAFCET Elevemoutched100% (1)
- Automation Studio Educ FRDocument8 pagesAutomation Studio Educ FRMamadou SowPas encore d'évaluation
- TD 4 EstDocument2 pagesTD 4 EstAnas AsranPas encore d'évaluation
- TD Préparation Programmation Découverte Automate TSX 37 - Le ConvoyeurDocument7 pagesTD Préparation Programmation Découverte Automate TSX 37 - Le ConvoyeurYasuoo BaylorPas encore d'évaluation
- Analyse Structurelle D - Un Système AutomatiséDocument11 pagesAnalyse Structurelle D - Un Système AutomatiséAbdeslamPas encore d'évaluation
- Communication ModbusDocument28 pagesCommunication ModbusFettah GuarnaouiPas encore d'évaluation
- TP1 Automatismes Industriels2010 2011Document7 pagesTP1 Automatismes Industriels2010 2011Jamal Eldahbi50% (2)
- Les Bus de TerrainDocument28 pagesLes Bus de TerrainaPas encore d'évaluation
- Bus de Terrain CanopenDocument17 pagesBus de Terrain Canopennamomari20031889Pas encore d'évaluation
- Initiation 2 TIA Portal MS1Document24 pagesInitiation 2 TIA Portal MS1Anbari MehdiPas encore d'évaluation
- TP3 STEP7 TS1 EntreeanalogiqueDocument3 pagesTP3 STEP7 TS1 EntreeanalogiqueNajmeddine OthmaniPas encore d'évaluation
- System e Automat Is eDocument0 pageSystem e Automat Is eYoussef ElalaouiPas encore d'évaluation
- Les Procedes D'obtention Par Deformation PlastiqueDocument73 pagesLes Procedes D'obtention Par Deformation PlastiqueKamel FedaouiPas encore d'évaluation
- 6 Exercices SEDDocument17 pages6 Exercices SEDPoupée De SoiePas encore d'évaluation
- Bases D'algorithmiqueDocument8 pagesBases D'algorithmiquesimoPas encore d'évaluation
- Chaine de Fabrication de Boites Métalliques Mécanisme de DécoupageDocument2 pagesChaine de Fabrication de Boites Métalliques Mécanisme de Découpagehamdi jihenPas encore d'évaluation
- TP 1Document7 pagesTP 1jij le grandPas encore d'évaluation
- Le GrafcetDocument47 pagesLe GrafcetHamed AssanPas encore d'évaluation
- Chapitre IV - Cours - TEAI - 4Document10 pagesChapitre IV - Cours - TEAI - 4Wã Lïd SãådätPas encore d'évaluation
- Structure Generale - Prof PDFDocument7 pagesStructure Generale - Prof PDFMeriem mimiPas encore d'évaluation
- Document TP n1 Auto Ts2 2013-2014Document57 pagesDocument TP n1 Auto Ts2 2013-2014iyed gara100% (1)
- Le Grafcet v2k5 - ProfDocument35 pagesLe Grafcet v2k5 - ProfhatimjPas encore d'évaluation
- MODEBUS1Document3 pagesMODEBUS1Youssra RamiPas encore d'évaluation
- 01 Revision Schemas Elec Pneum PDFDocument12 pages01 Revision Schemas Elec Pneum PDFTriki BilelPas encore d'évaluation
- Unité Centrale de TraitementDocument31 pagesUnité Centrale de TraitementMalou DjosefPas encore d'évaluation
- ControleDocument6 pagesControleمحفوظ سعيدPas encore d'évaluation
- Frais AgeDocument4 pagesFrais AgeRaouf BelamriPas encore d'évaluation
- 1 - La Fonction Méthodes UsinageDocument6 pages1 - La Fonction Méthodes UsinageAnas MohtadiPas encore d'évaluation
- La Base Du GrafcetDocument26 pagesLa Base Du GrafcetAbdelali Khalil0% (1)
- Programation - Notion de BaseDocument83 pagesProgramation - Notion de BasesinchicovichPas encore d'évaluation
- Circuits Pneumatiques Vol 3 PDFDocument2 pagesCircuits Pneumatiques Vol 3 PDFyassinePas encore d'évaluation
- Controle D'une Sortie NumériqueDocument11 pagesControle D'une Sortie NumériqueTouaiti BalkisPas encore d'évaluation
- Devoir de Controle N1-2as-2022Document4 pagesDevoir de Controle N1-2as-2022Abdelhak GhodhbeniPas encore d'évaluation
- Upload-Série D'exercices N°4-4tech-A.P.I-2014-2015Document7 pagesUpload-Série D'exercices N°4-4tech-A.P.I-2014-2015NUMBER ONEPas encore d'évaluation
- Guide Installation WifiMultiServices SagemF@St3304Document2 pagesGuide Installation WifiMultiServices SagemF@St3304Safae ZanatiPas encore d'évaluation
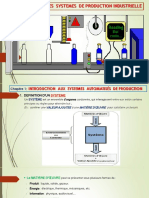
- 01 - CHP 1 - Introduction Aux Systèmes Automatisés de Production (3A-MEM 2023)Document20 pages01 - CHP 1 - Introduction Aux Systèmes Automatisés de Production (3A-MEM 2023)Panel NguessanPas encore d'évaluation
- 03 TechniquesdemesureDocument19 pages03 TechniquesdemesureHanane Tounsi100% (1)
- TP Initiation APIDocument14 pagesTP Initiation APIwilfried karmain fenossihPas encore d'évaluation
- Rapport PFEDocument20 pagesRapport PFEAbdelkarim ZaaimPas encore d'évaluation
- Capteurs PDFDocument22 pagesCapteurs PDFIngc AhmedPas encore d'évaluation
- Automate ProgrammableDocument15 pagesAutomate ProgrammableMehdi ÊlPas encore d'évaluation
- Automatismes IndustrielsDocument98 pagesAutomatismes Industrielsriahi maherPas encore d'évaluation
- API2021Document11 pagesAPI2021timo timoPas encore d'évaluation
- LES AUTOMATES PROGRAMMABLES (Notes de Cours)Document17 pagesLES AUTOMATES PROGRAMMABLES (Notes de Cours)Youness RabahPas encore d'évaluation
- Automatismes IndustrielsDocument42 pagesAutomatismes IndustrielsWiame Bouyoussef100% (1)
- Cours II2Document21 pagesCours II2Melek MelikPas encore d'évaluation
- 1 AutomatismeDocument16 pages1 AutomatismeAYMAN COUKIPas encore d'évaluation
- TP AutomatismeDocument16 pagesTP Automatismesaid100% (1)
- CHAP 1 ARCHITECTURE CALCULATEUR - EtudiantDocument13 pagesCHAP 1 ARCHITECTURE CALCULATEUR - EtudiantMbotchack Mbotchack100% (2)
- Chapitre IDocument6 pagesChapitre Isociété ettrisiti oulad faresPas encore d'évaluation
- Programmation Des APIDocument79 pagesProgrammation Des APIhaitam Elhansali100% (1)
- Didactic I El Epa Net 2001Document15 pagesDidactic I El Epa Net 2001sabbanrachidPas encore d'évaluation
- Maintenance Electricite Industrielle PrintDocument170 pagesMaintenance Electricite Industrielle PrintDiana Diana100% (2)
- Nouveau Document 1Document6 pagesNouveau Document 1Yassine KandoussiPas encore d'évaluation
- CF Positive SimpleDocument3 pagesCF Positive SimpleZaki Ait LahssainePas encore d'évaluation
- Didactic I El Epa Net 2001Document15 pagesDidactic I El Epa Net 2001sabbanrachidPas encore d'évaluation
- La Section Des Cables ElectriquesDocument7 pagesLa Section Des Cables ElectriqueslyahiaouiPas encore d'évaluation
- PC SN 2016Document8 pagesPC SN 2016Zaki Ait LahssainePas encore d'évaluation
- Chute de TensionDocument6 pagesChute de TensionmarwitosPas encore d'évaluation
- Sofrel TBRDocument21 pagesSofrel TBRZaki Ait LahssainePas encore d'évaluation
- VannesDocument18 pagesVannesSaifeddin BourogaaPas encore d'évaluation
- CV WAHBI HajarDocument2 pagesCV WAHBI HajarHajar WahbiPas encore d'évaluation
- TP DfsDocument15 pagesTP DfsAdil AbouelhassanPas encore d'évaluation
- Problème D'analyseDocument1 pageProblème D'analyseChafi DrissPas encore d'évaluation
- Comment Pirater Hacker Un Wifi Gratuitement - Pirateur de WifiDocument5 pagesComment Pirater Hacker Un Wifi Gratuitement - Pirateur de WifiMAMAMiya1213100% (3)
- Delta Ia-Plc DVP-SV Dvp-sv2 I Tse 20161103Document19 pagesDelta Ia-Plc DVP-SV Dvp-sv2 I Tse 20161103Pedro PereiraPas encore d'évaluation
- Cerfa 13971Document3 pagesCerfa 13971dayatchPas encore d'évaluation
- Mercure de France - Série (... ) Bpt6k105539jDocument159 pagesMercure de France - Série (... ) Bpt6k105539jAlexandra DragomirescuPas encore d'évaluation
- Protocole FTPDocument27 pagesProtocole FTPdualcorefreePas encore d'évaluation
- Réseaux BayésiensDocument13 pagesRéseaux BayésiensT.MPas encore d'évaluation
- Corriges Des Exercices Algorithme TOUS LES NIVEAUXDocument57 pagesCorriges Des Exercices Algorithme TOUS LES NIVEAUXAyoub Moustaouli79% (29)
- Plainte Contre l'OFCOM - CommunicationDocument1 pagePlainte Contre l'OFCOM - CommunicationSG - Publication 2009100% (1)
- Note SSD Proces VerbalDocument4 pagesNote SSD Proces VerbalnangaayissiPas encore d'évaluation
- TD 10Document1 pageTD 10Slimani AhmedPas encore d'évaluation
- Règlement Complet Du Jeu GOLDEN LEAGUE: BUTAGAZ AVEC LES CHAMPIONNES D'EUROPE DE HANDBALLDocument6 pagesRèglement Complet Du Jeu GOLDEN LEAGUE: BUTAGAZ AVEC LES CHAMPIONNES D'EUROPE DE HANDBALLOcéane DerrienPas encore d'évaluation
- Orange Offre Acces Boucle LocaleDocument125 pagesOrange Offre Acces Boucle LocaleRobert JohnsonPas encore d'évaluation
- BlowfishDocument8 pagesBlowfishGharsalli RamziPas encore d'évaluation
- KOTTO Thierry: USIG Genève CHE-463.864.209 WWW - Usig.ch Administration@usig - CH +41225526868Document1 pageKOTTO Thierry: USIG Genève CHE-463.864.209 WWW - Usig.ch Administration@usig - CH +41225526868thierry roland KottoPas encore d'évaluation
- 312 Concours Magister 2012 2013Document5 pages312 Concours Magister 2012 2013Zakaria KhechPas encore d'évaluation
- Les Obstacles Latéraux - Piste Pour Un Traitement EfficaceDocument38 pagesLes Obstacles Latéraux - Piste Pour Un Traitement EfficaceBoubakerBaazizPas encore d'évaluation
- Tableau PDFDocument31 pagesTableau PDFDorgelès N'ZiPas encore d'évaluation
- Trasaction BDDocument58 pagesTrasaction BDAli BPas encore d'évaluation
- 5100-Mat265 A2013Document7 pages5100-Mat265 A2013Mass BgayethPas encore d'évaluation
- 5-Intro Des Modeles A Equations SimultaneesDocument24 pages5-Intro Des Modeles A Equations SimultaneesTarik AmalouPas encore d'évaluation
- Memento MysqlDocument1 pageMemento Mysqlmicrobotica126Pas encore d'évaluation
- Dossier de Conception FonctionnelleDocument19 pagesDossier de Conception FonctionnellegogomaoliPas encore d'évaluation
- Idees BusinessDocument71 pagesIdees BusinessTaTa TashaPas encore d'évaluation
- Exercices SujetDocument11 pagesExercices SujetLycée Menzel HayetPas encore d'évaluation
- PWC Crée Une Offre de Dématérialisation Factures Basée Sur La Solution SaaS YoozDocument2 pagesPWC Crée Une Offre de Dématérialisation Factures Basée Sur La Solution SaaS YoozYoozPas encore d'évaluation
- These de Doctorat Forum VirtuelsDocument426 pagesThese de Doctorat Forum Virtuelsivan_segPas encore d'évaluation
- Tutorial TP Tournage CatiaDocument40 pagesTutorial TP Tournage CatiaImèn JndoubiPas encore d'évaluation