Vous aimerez peut-être aussi
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- Superalliage: Résistant à la chaleur de 2700 degrés Fahrenheit générée par les moteurs à turbine pour être plus chaud, plus rapide et plus efficaceD'EverandSuperalliage: Résistant à la chaleur de 2700 degrés Fahrenheit générée par les moteurs à turbine pour être plus chaud, plus rapide et plus efficacePas encore d'évaluation
- Guidage en Translation ProfDocument12 pagesGuidage en Translation Profslimani abdelilahPas encore d'évaluation
- TD132 CorrectionDocument6 pagesTD132 CorrectionTalel MissaouiPas encore d'évaluation
- Calcul D'un Volant D'inertieDocument19 pagesCalcul D'un Volant D'inertieNathan KibilaPas encore d'évaluation
- Matrice D'inertieDocument4 pagesMatrice D'inertieJean AbelaPas encore d'évaluation
- TDMMC Novembre 2010Document19 pagesTDMMC Novembre 2010Taysir AbidiPas encore d'évaluation
- Rapport de Mini Projet DDocument17 pagesRapport de Mini Projet DOumar TraoréPas encore d'évaluation
- Analyse Fonctionnelle 2021 PDFDocument7 pagesAnalyse Fonctionnelle 2021 PDFOuechtati MounirPas encore d'évaluation
- 45 Mecanique-VibratoireDocument25 pages45 Mecanique-VibratoireMohamed Taha MhiriPas encore d'évaluation
- M5 - TD Dynamique de RotationDocument4 pagesM5 - TD Dynamique de RotationkldmntPas encore d'évaluation
- Chap 3Document37 pagesChap 3Yassine TouhamiPas encore d'évaluation
- TD3 CinematiqueDocument4 pagesTD3 Cinematiqueimenrds0% (1)
- MN I Ver01 Part01Document30 pagesMN I Ver01 Part01Nathaniel Nerquaye-tetteh100% (1)
- Cinématique Des Systèmes - Cinématique Des MécaniquesDocument16 pagesCinématique Des Systèmes - Cinématique Des Mécaniquessinchicovich100% (3)
- Liaisons GlissieresDocument65 pagesLiaisons GlissieresImen HammoudaPas encore d'évaluation
- Chapitre V Analyse Dimensionnelle PDFDocument5 pagesChapitre V Analyse Dimensionnelle PDFFatma Zohra OUIRPas encore d'évaluation
- TD - 1 MMC m1 - CM 20 21Document1 pageTD - 1 MMC m1 - CM 20 21Farouk GhanemPas encore d'évaluation
- Chapitre III - Mobilité Et Hyperstatisme Partie 3Document3 pagesChapitre III - Mobilité Et Hyperstatisme Partie 3Lamia OhrchePas encore d'évaluation
- CalculDocument18 pagesCalculSalah Eddine ChouikhPas encore d'évaluation
- 05 Poly-Cinetique-Dynamique MP PSI PT-2 2Document24 pages05 Poly-Cinetique-Dynamique MP PSI PT-2 2kamalPas encore d'évaluation
- 2022 2023 Les Ailettes COURS de Transfert de Chaleur ENSPDocument29 pages2022 2023 Les Ailettes COURS de Transfert de Chaleur ENSPThamar GomaPas encore d'évaluation
- Équilibrage Des Solides Tournants Profs PDFDocument8 pagesÉquilibrage Des Solides Tournants Profs PDFfitasmounirPas encore d'évaluation
- 03 Cisaillement RDMDocument2 pages03 Cisaillement RDMInes BhaPas encore d'évaluation
- TP Vibrations - Machine À LaverDocument12 pagesTP Vibrations - Machine À LaverAndré DaneluzziPas encore d'évaluation
- 5wa3w-Examen Special Physique3 2010 2011Document4 pages5wa3w-Examen Special Physique3 2010 2011Manizan Emmanuel YaoPas encore d'évaluation
- TP 3 Groupe 2Document10 pagesTP 3 Groupe 2Chipou NourdinePas encore d'évaluation
- RESISTANCE DES MATERIAUX N1 ExeDocument3 pagesRESISTANCE DES MATERIAUX N1 ExeghfgdhhngfjfghfnggPas encore d'évaluation
- Ptv-Roue À GorgeDocument5 pagesPtv-Roue À Gorgeadem bengharsaPas encore d'évaluation
- 1 TD Sollicitations - Composees SUJETDocument2 pages1 TD Sollicitations - Composees SUJETsaraPas encore d'évaluation
- S623.2 Comportement Des MecanismesDocument3 pagesS623.2 Comportement Des MecanismesGhada Mouedhen100% (2)
- Cours Techniques D'usinage AvancéesDocument79 pagesCours Techniques D'usinage AvancéesFadwa ZRPas encore d'évaluation
- Calcul Des Roulements 2Document11 pagesCalcul Des Roulements 2NeoXana01Pas encore d'évaluation
- Chap3 Cinematique Du Solide OkDocument16 pagesChap3 Cinematique Du Solide OkmatozoPas encore d'évaluation
- Analyse Modale Dans CATIADocument22 pagesAnalyse Modale Dans CATIAdidierzefPas encore d'évaluation
- EXEMPLE CORRIGES Polygones Des Accélérations 2020Document22 pagesEXEMPLE CORRIGES Polygones Des Accélérations 2020JJ MosesPas encore d'évaluation
- Ecoulement Entre Deux CylindresDocument8 pagesEcoulement Entre Deux Cylindreshanaa soltaniPas encore d'évaluation
- 01programme 2STM PDFDocument9 pages01programme 2STM PDFMajda El-aouniPas encore d'évaluation
- L3 TP Fluent PDFDocument36 pagesL3 TP Fluent PDFGuediri Aimen100% (1)
- 4.TP4 - Equilibrage Des MassesDocument12 pages4.TP4 - Equilibrage Des MassesHicham KhalloukiPas encore d'évaluation
- TD 3 Loi Entrée Sortie Par Fermeture GéométriqueDocument4 pagesTD 3 Loi Entrée Sortie Par Fermeture GéométriqueChokri AtefPas encore d'évaluation
- Thermodynamique Partie II VF PDFDocument53 pagesThermodynamique Partie II VF PDFmezzi houssemPas encore d'évaluation
- Rdm5 TorsionDocument6 pagesRdm5 TorsionMohamed SahilPas encore d'évaluation
- Exo 04 05 Stat Liaison Equiv Cor PDFDocument4 pagesExo 04 05 Stat Liaison Equiv Cor PDFJourdan MbappePas encore d'évaluation
- Rapport BE1Document51 pagesRapport BE1ahmed017100% (1)
- Cours MEF Scéance 1&2&3Document74 pagesCours MEF Scéance 1&2&3ANDAHMOU SoulaimanPas encore d'évaluation
- MECANIQUEDocument1 pageMECANIQUEHicham BaghdadiPas encore d'évaluation
- Tp4 Calcul Raideur Rdm6 Optimisation de Structure Logiciel RDM Le ManDocument5 pagesTp4 Calcul Raideur Rdm6 Optimisation de Structure Logiciel RDM Le ManAmine RdPas encore d'évaluation
- Chapitre 2 - Vibrations Des MachineDocument23 pagesChapitre 2 - Vibrations Des MachineMackenzie MoranPas encore d'évaluation
- Ennonce TP AnsisDocument2 pagesEnnonce TP AnsisAhmed Walid100% (1)
- TP UsigeDocument7 pagesTP UsigenarimPas encore d'évaluation
- Chaînes de Solides Et Hyperstatisme PDFDocument13 pagesChaînes de Solides Et Hyperstatisme PDFmmPas encore d'évaluation
- FatigueDocument37 pagesFatigueTIFLUINE100% (1)
- Corrige Liais Equiv en ParalleleDocument4 pagesCorrige Liais Equiv en ParalleleAyou HamPas encore d'évaluation
- TP HydDocument6 pagesTP HydKhaoula ZefanePas encore d'évaluation
- Bac SSI 2009 Actionneur Commande Vol A380Document34 pagesBac SSI 2009 Actionneur Commande Vol A380kingofdarkness2010Pas encore d'évaluation
- Fiabilité, maintenance prédictive et vibration des machinesD'EverandFiabilité, maintenance prédictive et vibration des machinesPas encore d'évaluation
- TP Initiation Au Fraisage CN PDFDocument9 pagesTP Initiation Au Fraisage CN PDFAymen HssainiPas encore d'évaluation
- 04 - Tds - Analyse de ParetoDocument7 pages04 - Tds - Analyse de ParetoSalah Eddine Chouikh100% (1)
- Cours STRATEGIE DE MAINTENANCE PDFDocument67 pagesCours STRATEGIE DE MAINTENANCE PDFamekhzoumi80% (5)
- 02 Gestion Des Interventions PDFDocument9 pages02 Gestion Des Interventions PDFAymen HssainiPas encore d'évaluation
- Manuel de Programmation G-CodeDocument538 pagesManuel de Programmation G-CodeJorge Amaral100% (14)
- 04 - Les Outils de Base de Prise de Decision PDFDocument5 pages04 - Les Outils de Base de Prise de Decision PDFTriki Bilel100% (1)
- Programmation CDocument6 pagesProgrammation CAymen HssainiPas encore d'évaluation
- La RectificationDocument2 pagesLa RectificationAymen HssainiPas encore d'évaluation
- 03 - Les Differentes Formes de MaintenanceDocument7 pages03 - Les Differentes Formes de MaintenanceWognin MoïsePas encore d'évaluation
- 120 - Couts de Maintenance - Prof - Retour Sur InvestissemenDocument8 pages120 - Couts de Maintenance - Prof - Retour Sur InvestissemenAymen Hssaini100% (1)
- Initiation Au FraisageDocument5 pagesInitiation Au FraisageAymen HssainiPas encore d'évaluation
- Guide Pl7 Pro Connecter Et TransfererDocument9 pagesGuide Pl7 Pro Connecter Et TransfererdoudoutstmPas encore d'évaluation
- Gammes Maintenance Preventive MAERADocument4 pagesGammes Maintenance Preventive MAERAAymen HssainiPas encore d'évaluation
- TP Initiation Au Fraisage CN PDFDocument9 pagesTP Initiation Au Fraisage CN PDFAymen HssainiPas encore d'évaluation
- Guide Pl7 Pro Connecter Et TransfererDocument9 pagesGuide Pl7 Pro Connecter Et TransfererdoudoutstmPas encore d'évaluation
- Guide PL7 Pro Connecter Et TransfererDocument1 pageGuide PL7 Pro Connecter Et TransfererAymen HssainiPas encore d'évaluation
- FreDocument347 pagesFreAymen HssainiPas encore d'évaluation
- KONE GuideEntretienMaintenanceSécurité 2016Document30 pagesKONE GuideEntretienMaintenanceSécurité 2016Aymen HssainiPas encore d'évaluation
- Cours PDFDocument150 pagesCours PDFAymen HssainiPas encore d'évaluation
- Guide Pratique Usine Automobile Du FuturDocument61 pagesGuide Pratique Usine Automobile Du FuturAymen HssainiPas encore d'évaluation
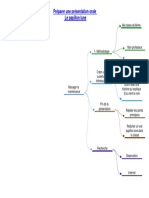
- Préparer Une Présentation Orale Le Papillon LuneDocument1 pagePréparer Une Présentation Orale Le Papillon LuneAymen HssainiPas encore d'évaluation
- Equipement Du LaboratoireDocument170 pagesEquipement Du LaboratoireHeart King100% (1)
- JSFS 2000 141 3 3 0Document7 pagesJSFS 2000 141 3 3 0Aymen HssainiPas encore d'évaluation
- 2016 - 05 - General Storage Recommendations For Spare Parts - FRDocument2 pages2016 - 05 - General Storage Recommendations For Spare Parts - FRAymen HssainiPas encore d'évaluation
- Module Gestion de La ProductionDocument78 pagesModule Gestion de La ProductionEl Jaouad67% (3)
- Module Gestion de La ProductionDocument23 pagesModule Gestion de La ProductionAymen HssainiPas encore d'évaluation
- Systeme Injection HdiDocument145 pagesSysteme Injection Hdicedricvillar100% (15)
- Chrono 01 PDFDocument32 pagesChrono 01 PDFAymen HssainiPas encore d'évaluation
- 1hydrauliqParisTech PDFDocument34 pages1hydrauliqParisTech PDFAymen HssainiPas encore d'évaluation
- Cours PDFDocument150 pagesCours PDFAymen HssainiPas encore d'évaluation
- COURS ch2 PDFDocument13 pagesCOURS ch2 PDFpilaf62Pas encore d'évaluation
- Coefficient de Reflexion Et de Transmission Des Ondes Sismiques Amplitude Et Film Synthetique PDFDocument15 pagesCoefficient de Reflexion Et de Transmission Des Ondes Sismiques Amplitude Et Film Synthetique PDFAyad SaidPas encore d'évaluation
- DM - 14 Optique PDFDocument3 pagesDM - 14 Optique PDFBrandy OdonnellPas encore d'évaluation
- Commande VectorielleDocument31 pagesCommande Vectoriellezitane_amine91% (11)
- PDF - 2023 XCHI564 EMINES 1 Systemes Bilans Ecoulements Idéaux EfficacitéDocument49 pagesPDF - 2023 XCHI564 EMINES 1 Systemes Bilans Ecoulements Idéaux EfficacitéMouncef AsryPas encore d'évaluation
- RECEUIL PC Tle SDocument39 pagesRECEUIL PC Tle SokouejeanjuniorPas encore d'évaluation
- Thermo 4Document5 pagesThermo 4Renaud Martin-EnglishPas encore d'évaluation
- Rappels Chimie TheoriqueDocument113 pagesRappels Chimie TheoriqueAbdoulaye DialloPas encore d'évaluation
- Preparation Du FootballeurDocument4 pagesPreparation Du Footballeurkarim100% (1)
- Vibration Et Les Ondes Mecanique UsthbDocument5 pagesVibration Et Les Ondes Mecanique UsthbKovax KovaxinovPas encore d'évaluation
- TD9-magnétostatiqueDocument2 pagesTD9-magnétostatiqueelisedelage47Pas encore d'évaluation
- CH 2 Circuits Resistifs - Lois de KirchoffDocument13 pagesCH 2 Circuits Resistifs - Lois de KirchoffJocelyn zienlet SOMDAPas encore d'évaluation
- Fiche PuissancesDocument6 pagesFiche Puissancesayoub elPas encore d'évaluation
- Caract C3 A9ristiques 20g C3 A9om C3 A9triquesDocument7 pagesCaract C3 A9ristiques 20g C3 A9om C3 A9triquesmaraghni_hassine7592Pas encore d'évaluation
- Cours Master Gisement Solaire Partie I PDFDocument10 pagesCours Master Gisement Solaire Partie I PDFHadjer BnPas encore d'évaluation
- Cour #08 Propagation Des Sons en Espace ClosDocument22 pagesCour #08 Propagation Des Sons en Espace Closasma asmaPas encore d'évaluation
- Feuilletage 498Document30 pagesFeuilletage 498Miguel AngePas encore d'évaluation
- Travail Et Energie Cinetique Corrige Serie D Exercices 1Document9 pagesTravail Et Energie Cinetique Corrige Serie D Exercices 1Imad Tika67% (3)
- Physique A CB 2020Document12 pagesPhysique A CB 2020nolanbrunet11Pas encore d'évaluation
- Activité 2: Superman: Objectif: Découvrir La Notion de Force D'attraction GravitationnelleDocument2 pagesActivité 2: Superman: Objectif: Découvrir La Notion de Force D'attraction Gravitationnelleissou1234Pas encore d'évaluation
- Les Courants de FoucaultDocument26 pagesLes Courants de FoucaultFirass Chafai100% (1)
- Moteur AsynchroneDocument18 pagesMoteur AsynchroneAnonymous 6VBmiJQ7MPas encore d'évaluation
- Devoir 1 Modele 13 Physique Chimie 1er Bac Semestre 1 3Document2 pagesDevoir 1 Modele 13 Physique Chimie 1er Bac Semestre 1 3brahim hniPas encore d'évaluation
- TP DipoleDocument2 pagesTP DipoleahmmaloukaPas encore d'évaluation
- Magie Et Ésotérisme, LibractionDocument38 pagesMagie Et Ésotérisme, LibractionRôlisteTV100% (2)
- MMCDocument484 pagesMMCMarouane KhoukhPas encore d'évaluation
- Chapitre 3 Méthode Des ForcesDocument25 pagesChapitre 3 Méthode Des ForcesMadi OuchenePas encore d'évaluation
- Programme Pedagogique Francais Genie Mecanique Tsi 1Document12 pagesProgramme Pedagogique Francais Genie Mecanique Tsi 1Marwan BouhdidiPas encore d'évaluation
- Epreuves Ems 6Document5 pagesEpreuves Ems 6ndiayePas encore d'évaluation
- Travaux Diriges Mecanique Des Fluides 2013 2014 PDFDocument32 pagesTravaux Diriges Mecanique Des Fluides 2013 2014 PDFChaima Kh100% (1)