Cours 05 - Fonction de Transfert de Systèmes Complexes Lycée Fermat Toulouse - CPGE MPSI/PCSI
Fonction de Transfert de Systèmes Complexes
Exemple de Système Complexe
Sommaire SEGWAY
1 - Place de la Fonction Transfert dans la Démarche
d’Etude des SLCI
2 - Rappel Cours 04 - Définition de la Fonction de Transfert
3 - Opérations Elémentaires sur les Schémas-Blocs
4 - Représentation Générique d’une Boucle Fermée
5 - Fonction de Transfert Boucle Fermée (FTBF)
6 - Fonction de Transfert Boucle Ouverte (FTBO)
7 - Retour Unitaire
8 - Manipulation des Schémas-Blocs
9 - Algèbre des Schémas-Blocs
10 - Fonction de Transfert Boucle Fermée des Systèmes
Multi-Variables
11 - Application : Calcul de la Fonction de Transfert du
Segway
1 - PLACE DE LA FONCTION TRANSFERT DANS LA DEMARCHE D’ETUDE DES SLCI
(1)
démarche
présentée dans le
Reprenons la démarche d’étude des systèmes asservis(1) et appliquons-la sur l’exemple du
chapitre 6 du cours Segway. On se fixe comme objectif d’étude d’établir un modèle de calcul du Segway pour
03 - Introduction à vérifier des performances vis-à-vis du cahier des charges fonctionnel.
l’automatique.
Domaine Physique (réel)
On modélise les entrées du
système ainsi que le système lui Comportement réel du système
(2)
même. Pour cela on exploite les
Rappel : Les
modèles de connaissance exis-
modèles de
connaissance tants et on construit, si besoin,
proviennent des modèles de comportement Objectif d’étude
d'équations (2)
. Modélisation
correspondant aux Ces différents modèles permet- des entrées et Domaine de simulation Validation
lois fondamentales
issues de la physique.
tent d'obtenir au final une du système
Les modèles de équation différentielle comple-
Comportement simulé du système
comportement xe et un schéma-bloc fonction-
correspondent à des nel. Modèles de Modèle de calcul
lois purement connaissance et de Schéma-bloc +
mathématiques comportement Fonction de transfert
construites par Le modèle s'il est non linéaire
identification à partir doit être aussi ensuite linéarisé Schéma-bloc fonctionnel
de courbes obtenues autour d’un point de
par l'expérimentation. fonctionnement que l’on Passage dans le domaine de Laplace
Calcul de la fonction de transfert
choisit. + Linéarisation autour d’un point de
fonctionnement (si nécessaire)
(3)
C’est à partir de la transformation de l'équation différentielle du modèle en équation
obtenue après
polynomiale (3) que l’on obtient la fonction de transfert du SLCI. Elle permet de caractériser le
application de la
transformée de comportement intrinsèque du système qui permettra ensuite de répondre à l’objectif d’étude
Laplace (validation de performances). Pour déterminer la fonction de transfert d’un SLCI constitué de
plusieurs blocs suivant une structure complexe, deux solutions sont possibles :
La première solution est une méthode qui consiste à manipuler et combiner uniquement
les différentes équations des blocs du système. Cependant cette solution a pour défaut de
devenir rapidement trop calculatoire pour des systèmes complexes.
Florestan MATHURIN Page 1 sur 8
Cours 05 - Fonction de Transfert de Systèmes Complexes Lycée Fermat Toulouse - CPGE MPSI/PCSI
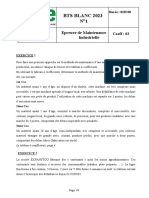
La seconde solution est une méthode qui consiste à manipuler et simplifier partiellement
ou parfois complètement le schéma-bloc du SLCI. Cette méthode est plus efficace pour
des systèmes complexes mais en revanche les simplifications réalisées éloignent le modèle
de la réalité physique du système.
Exemple : Simplification complète du schéma-bloc du Segway pour α(p)=0 α(p)=0
ψc(p) ε(p) W(p) U(p)
p
- ψ(p)
+ C(p) + + M(p) H(p) +
- - -
UP(p) UV(p) G(p)
P(p)
Simplification du schéma-bloc pour α(p)=0
E(p) = ψc(p) S(p)= ψ(p)
F(p)
L’objectif de ce cours est de présenter les différents outils ainsi que les méthodes de travail à
utiliser pour calculer la fonction de transfert d'un système complexe.
2 - RAPPEL COURS 04 - DEFINITION DE LA FONCTION DE TRANSFERT
On appelle fonction de transfert H(p) d’un système la
S(p) E(p) S(p)
relation dans le domaine symbolique telle que H(p) . H(p)
E(p)
Elle caractérise le comportement intrinsèque du système et
ne dépend ni de l'entrée, ni de la sortie.
3 - OPERATIONS ELEMENTAIRES SUR LES SCHEMAS-BLOCS
3.1. Blocs en série
Dans le cas des blocs en série, on effectue le produit des fonctions de transfert de chaque
bloc :
E(p) S(p) E(p) S(p)
H1(p) H2(p) H3(p) H(p)
Simplification
H(p)= H1(p).H2(p).H3(p)
3.2. Blocs en parallèle
Dans le cas des blocs en parallèle, on utilise la relation du sommateur pour déduire
simplement l’expression de la fonction de transfert du système :
H1(p)
E(p) + S(p) E(p) S(p)
H(p)
+
Simplification
H2(p) H(p)= H1(p) + H2(p)
Florestan MATHURIN Page 2 sur 8
Cours 05 - Fonction de Transfert de Systèmes Complexes Lycée Fermat Toulouse - CPGE MPSI/PCSI
4 - REPRESENTATION GENERIQUE D’UNE BOUCLE FERMEE
Chaîne directe
(4)
i.e. opérations Après manipulations sur le schéma-bloc du
E(p) ε(p) S(p)
élémentaires système complexe (4), on arrive toujours à + A(p)
précédentes un/des système(s) bouclé(s) dont la forme -
générique est la suivante :
M(p)
Cette forme générique de schéma-bloc est à B(p)
connaître, elle est appelée communément
boucle fermée. Chaîne de retour
On y retrouve :
ε(p) qui est l'écart entre M(p) de la chaine de retour et E(p) en entrée,
A(p) qui est la fonction de transfert en chaîne directe,
B(p) qui correspond à la fonction de transfert de la chaîne de retour,
M(p) qui est le produit entre la sortie S(p) et la fonction de transfert de la chaine de
retour.
5 - FONCTION DE TRANSFERT BOUCLE FERMEE (FTBF)
On définit la fonction de transfert en boucle fermée d’un système pour caractériser le
comportement global du système. Elle est déterminée sur la base du schéma boucle fermée
présenté précédemment.
S(p)
Par définition : H(p)
S(p)
E (p)
E(p) ε(p)
+ A(p) avec S(p) (p).A(p)
-
(5) (p) E(p) M(p) (5)
équation obtenue
en sortie du M(p)
et M(p) B(p).S(p)
sommateur B(p)
d’où : S(p) E(p) M(p).A(p)
Simplification S(p) E(p) B(p).S(p).A(p)
S(p).1 B(p).A(p) E(p).A(p)
E(p) A(p) S(p)
H(p) S(p) A(p)
1 A(p).B(p) Soit : H(p)
E(p) 1 A(p).B(p)
S(p) A(p)
H(p) est appelée fonction de transfert en boucle fermée (FTBF), elle
E(p) 1 A(p).B(p)
caractérise le comportement global du système boucle fermée.
Attention aux signes dans le comparateur !!!! Si le signe – de M(p) dans le comparateur est
S(p) A(p)
remplacé par un + la formule devient H(p) .
E(p) 1 A(p).B(p)
On utilise la FTBF pour étudier les réponses temporelles s(t) d’un système à des entrées e(t)
quelconques. Ces études permettent ensuite d'analyser les performances du système bouclé.
Florestan MATHURIN Page 3 sur 8
Cours 05 - Fonction de Transfert de Systèmes Complexes Lycée Fermat Toulouse - CPGE MPSI/PCSI
6 - FONCTION DE TRANSFERT BOUCLE OUVERTE (FTBO)
La fonction de transfert en boucle ouverte T(p)
E(p) ε(p) S(p)
est définie comme la fonction de transfert du A(p)
+
système lorsque le retour sur le sommateur -
est coupé. Elle comprend la chaîne directe et
la chaîne de retour. Dans le cas de la FTBO, on M(p)
ne s'intéresse pas à la sortie S(p) mais à la B(p)
mesure M(p) en fonction ε(p). Coupure
Simplification
La FTBO correspond au produit de tous les
blocs de la boucle :
ε (p) M(p)
T(p)=A(p).B(p)
M(p)
T(p) A(p).B(p)
(p)
La FTBO est utilisée principalement pour déterminer les conditions de stabilité du système
boucle fermée (cours de PSI et MP).
Si la structure du schéma-bloc est complexe, on peut définir des FTBO et FTBF
intermédiaires pour tous les sous-systèmes à boucle fermée, mais seules la FTBF et la
FTBO de la boucle principale sont intéressantes.
Dans la pratique on calcule simplement la FTBF à partir de la FTBO grâces aux relations
suivantes :
FT de la chaine directe 1 FTBO
FTBF .
1 FTBO FT de la chaine de retour 1 FTBO
7 - RETOUR UNITAIRE
Un système asservi peut toujours être mis
E(p) ε(p) S(p)
sous la forme d’un système à retour unitaire A(p)
+
si l'entrée E(p) et la sortie S(p) sont -
comparables (même dimension).
L'avantage pratique d'un tel système est que la FTBF est calculée très facilement à partir de la
S(p) A(p) FTBO
FTBO : H(p) .
E(p) 1 A(p) 1 FTBO
8 - MANIPULATION DES SCHEMAS-BLOCS
La seule difficulté dans l'analyse d'un système asservi décrit par un schéma-bloc complexe, est
de réussir à obtenir les FTBO et FTBF du système pour étudier ses performances
L'idée générale de la méthode est de manipuler le schéma-bloc initial complexe pour faire
apparaître des sous-systèmes à boucle fermée pour lesquels la FTBF est évidemment simple à
calculer. Pour se ramener à des sous-systèmes à boucle fermée, on utilise le déplacement de
jonctions et de sommateurs. On pourra ensuite permuter deux sommateurs ou deux jonctions
de façon à faire apparaître des boucles fermées.
Florestan MATHURIN Page 4 sur 8
Cours 05 - Fonction de Transfert de Systèmes Complexes Lycée Fermat Toulouse - CPGE MPSI/PCSI
8.1. Déplacements de jonctions en direction d'autres jonctions
L'objectif est de déplacer une jonction vers une autre jonction puis de les alterner ensuite (de
façon à faire disparaître une jonction gênante d'une boucle fermée).
U(p) W(p) U(p) W(p)
A(p) B(p) A(p) B(p)
Le déplacement peut se faire vers la gauche ou vers la droite mais il faut faire attention au
bloc rajouté dans la branche déplacée.
Déplacement du point de S(p)
Y(p) B(p)
prélèvement vers la gauche A(p)
X(p)
Schéma-bloc initial C(p).A(p)
Y(p) B(p) S(p)
A(p)
X(p) Y(p) S(p)
C(p) A(p) B(p)
Déplacement du point de
X(p)
prélèvement vers la droite C(p)/B(p)
(6)
de façon à faire 8.2. Déplacements de sommateurs en direction d'autres sommateurs
disparaître un L'objectif est, dans un premier temps, de déplacer un sommateur vers un autre sommateur
sommateur gênant en puis, dans un second temps, de les alterner (6).
plein milieu d'une
boucle fermée U(p) W(p) U(p) W(p)
+ + + +
- + + -
V(p) X(p) X(p) V(p)
Le déplacement peut se faire vers la gauche ou vers la droite et il faut faire attention au bloc
rajouté dans la branche déplacée.
Déplacement du sommateur Y(p) S(p)
vers la gauche + A(p) B(p)
-
Schéma-bloc initial
ε(p) S(p) X(p)
Y(p) B(p) C(p)/A(p)
A(p) +
-
X(p)
C(p)
Y(p) S(p)
A(p) B(p) +
-
Déplacement du sommateur
vers la droite X(p)
C(p).B(p)
Florestan MATHURIN Page 5 sur 8
Cours 05 - Fonction de Transfert de Systèmes Complexes Lycée Fermat Toulouse - CPGE MPSI/PCSI
Il est inutile de déplacer un sommateur en direction d'une jonction ou l'inverse car aucune
simplification n'est possible.
Il faut toujours faire attention au(x) bloc(s) rajouté(s) dans la branche déplacée.
9 - ALGEBRE DES SCHEMAS-BLOCS
9.1. Système à boucles concentriques
E(p) S(p)
+ + A(p) C(p)
- -
B(p)
D(p)
Pour ce type de système, il faut toujours commencer par calculer la FTBF de la boucle interne.
E(p) A(p) S(p)
+ C(p)
- 1 A(p).B(p)
D(p)
On reconnait ensuite une boucle fermée que l’on sait bien traiter.
9.2. Système à boucles imbriquées
E(p)
E(p) S(p)
-
+ A(p) + B(p) D(p)
-
C(p)
Pour ce type de système, il faut toujours commencer par déplacer les points de prélèvement
pour se ramener à un système de boucles concentriques.
E(p) D(p)
E(p) S(p)
-
+ A(p) + B(p) D(p)
-
C(p)
On se retrouve ensuite devant un système à boucles concentriques que l’on sait aussi bien
gérer.
Florestan MATHURIN Page 6 sur 8
Cours 05 - Fonction de Transfert de Systèmes Complexes Lycée Fermat Toulouse - CPGE MPSI/PCSI
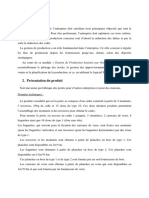
10 - FONCTION DE TRANSFERT BOUCLE FERMEE DES SYSTEMES MULTI-VARIABLES
Dans un système réel, plusieurs entrées peuvent venir modifier la sortie. Ces entrées
(7)
Entrée consigne comprennent non seulement l'entrée principale (7) mais aussi des entrées supplémentaires
très souvent parasites (bruit, effort résistant...).
E2(p)
E1(p) - S(p)
+ A(p) + B(p)
-
C(p)
Pour déterminer la fonction de transfert sur ce type de système, on utilise le principe de
superposition des SLCI. On superpose deux modes : un 1er mode pour lequel l’entrée E2(p) est
considérée comme nulle et un 2nd mode lequel l’entrée E1(p) est considérée comme nulle.
Mode à entrée E2(p)=0 S(p)
H1 (p) E
2 (p )0 E1 (p) E
E1(p) 2 (p )0
S(p)
+ A(p) B(p)
- A(p).B(p)
H1 (p) E
2 (p)0 1 A(p).B(p).C(p)
C(p)
H1(p) est la fonction de transfert en
poursuite.
Mode à entrée E1(p)=0
E2(p)
- S(p) - E2(p) S(p)
+ A(p) + B(p) + B(p)
- -
C(p) A(p) C(p)
S(p) B(p)
H2 (p) E H2(p) est la fonction de transfert en régulation.
1 (p )0 E2 (p) E 1 A(p).B(p).C(p)
1 (p )0
La superposition des 2 modes permet d’obtenir au final la fonction de transfert boucle fermée
du système multi-variables :
A(p).B(p) B(p)
S(p) H1 (p) E .E1 (p) H2 (p) E .E2 (p) .E1 (p) .E2 (p)
2 (p )0 1 (p )0 1 A(p).B(p).C(p) 1 A(p).B(p).C(p)
Le dénominateur de la fonction de transfert en poursuite et de la fonction de transfert en
régulation est le même, c’est une caractéristique de la boucle. On peut montrer que la
stabilité du système (qui ne dépend que de la FTBO) ne dépend pas du nombre d'entrée
(cours de PSI ou MP).
Florestan MATHURIN Page 7 sur 8
Cours 05 - Fonction de Transfert de Systèmes Complexes Lycée Fermat Toulouse - CPGE MPSI/PCSI
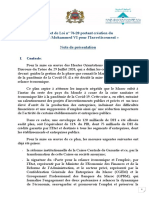
11 - APPLICATION : CALCUL DE LA FONCTION DE TRANSFERT DU SEGWAY
Schéma-bloc initial du système α(p)
ε(p) W(p) U(p)
p
ψc(p) - ψ(p)
+ C(p) + + M(p) H(p) +
- - -
UP(p) UV(p) G(p)
P(p)
On constate que le schéma-bloc du système est complexe avec notamment deux variables
d’entrée (ψc(p) et α(p)) et plusieurs boucles imbriquées.
Calculer la fonction de transfert boucle fermée du système.
Solution :
α(p) 1
C(p).M(p).H(p)
E(p) = ψc(p) - S(p)= ψ(p)
+ F(p)
Simplification du
schéma-bloc
M(p).H(p)
1 M(p).H(p).G(p)
C(p).
M(p).H(p)
1 P(p).
1 M(p).H(p).G(p)
Avec F(p)
M(p).H(p)
1 M(p).H(p).G(p)
1 C(p).
M(p).H(p)
1 P(p).
1 M(p).H(p).G(p)
F(p)
Le principe de superposition permet au final d’écrire : (p) F(p). c (p) . (p)
C(p).M(p).H(p)
M(p).H(p).C(p)
avec F(p) .
1 M(p).H(p).C(p) M(p).H(p).G(p) M(p).H(p).P(p)
Florestan MATHURIN Page 8 sur 8
Vous aimerez peut-être aussi
- Résumé Asservissement SIDocument20 pagesRésumé Asservissement SIBalalaŇaŖîf100% (6)
- Vocabulaire BanqueDocument6 pagesVocabulaire BanqueBouh AmedPas encore d'évaluation
- TP3 Configuration de Filetage Sur SolidWorks CAM 230703 001835Document22 pagesTP3 Configuration de Filetage Sur SolidWorks CAM 230703 001835HichamPas encore d'évaluation
- Support Rapport de Stage FinaliséDocument19 pagesSupport Rapport de Stage FinaliséIntel Radeon100% (1)
- RDPDocument81 pagesRDPKarim ElyazamiPas encore d'évaluation
- Examen Blanc - Maintenance 2023Document4 pagesExamen Blanc - Maintenance 2023Abi ClémentPas encore d'évaluation
- Analyse Fonctionnelle Destructeurdeseringue 01Document7 pagesAnalyse Fonctionnelle Destructeurdeseringue 01KooraNow HDPas encore d'évaluation
- Systèmes Du Premier Ordre PDFDocument7 pagesSystèmes Du Premier Ordre PDFtrawri007Pas encore d'évaluation
- TP 2017 2018Document12 pagesTP 2017 2018Douja BenPas encore d'évaluation
- StatistiquesDocument71 pagesStatistiquesAyoub NaimiPas encore d'évaluation
- Cours 07Document8 pagesCours 07BalalaŇaŖîfPas encore d'évaluation
- SALBPDocument5 pagesSALBPDSDDFPas encore d'évaluation
- TPM Version FianalDocument26 pagesTPM Version FianalAsraoui ZakariaPas encore d'évaluation
- 03 TD Ordonnancement-CorrDocument4 pages03 TD Ordonnancement-Corrعبدالرزاق أفرياضPas encore d'évaluation
- Simu BanqueDocument18 pagesSimu BanqueLouis OlivePas encore d'évaluation
- 2021 2022 Pcsi ReponsetemporelleDocument20 pages2021 2022 Pcsi ReponsetemporelleAmal FatouhPas encore d'évaluation
- Transf LaplaceDocument29 pagesTransf Laplacemrgabriel306Pas encore d'évaluation
- Exo Critere Routh PDFDocument3 pagesExo Critere Routh PDFHajar TouilPas encore d'évaluation
- Chapter 8Document17 pagesChapter 8Ilham TimadjerPas encore d'évaluation
- MRP Ordonnacement Et Planification Cours 06-01-11Document28 pagesMRP Ordonnacement Et Planification Cours 06-01-11Hayét ZmaltaPas encore d'évaluation
- Prelude Cas PratiqueDocument11 pagesPrelude Cas Pratiqueبلال الحمدي100% (1)
- Qualite IshikawaDocument18 pagesQualite IshikawaJohn BaltonPas encore d'évaluation
- Introduction Aux Méthodes Agiles Et ScrumDocument6 pagesIntroduction Aux Méthodes Agiles Et ScrumksaierPas encore d'évaluation
- PLNEDocument109 pagesPLNEZINEB BELBACHIRPas encore d'évaluation
- Chap3 SCMDocument66 pagesChap3 SCMMejri ImedPas encore d'évaluation
- Examen Normalise Provincial Pour L'Obtention Du Certificat D'Etudes PrimairesDocument2 pagesExamen Normalise Provincial Pour L'Obtention Du Certificat D'Etudes Primairesakrim100% (2)
- DualitéDocument39 pagesDualitéikrameliPas encore d'évaluation
- Robots Industriels - Ilian Bonev-Cours 02Document21 pagesRobots Industriels - Ilian Bonev-Cours 02Ivan AvramovPas encore d'évaluation
- SIMPLEXEDocument11 pagesSIMPLEXEJacques YeoPas encore d'évaluation
- Esprit Tournage FraisageDocument58 pagesEsprit Tournage FraisagexevniPas encore d'évaluation
- SmedDocument4 pagesSmedimane moubarikPas encore d'évaluation
- Math S4 PDFDocument8 pagesMath S4 PDFJiddou MedlaghdhefPas encore d'évaluation
- Cours 06Document4 pagesCours 06BalalaŇaŖîfPas encore d'évaluation
- GmaoDocument2 pagesGmaoWalid FoudadPas encore d'évaluation
- Td1 Corrige 1314Document10 pagesTd1 Corrige 1314Mohamed Arbi Ben YounesPas encore d'évaluation
- Programme EcsDocument40 pagesProgramme EcsSi Mohamed RahiliPas encore d'évaluation
- Maths Ensa Asfi2Document4 pagesMaths Ensa Asfi2MOUHSSINE CHADILIPas encore d'évaluation
- L3-Gim - TP - GmaoDocument30 pagesL3-Gim - TP - GmaoAngel Bird100% (1)
- Rapport de TP2 de Gestion de ProductionDocument11 pagesRapport de TP2 de Gestion de ProductionJawad MaalPas encore d'évaluation
- Année Universitaire 2022-2023 Formation Filière Ingénieur ERME Module: Automatique Série N° 3Document3 pagesAnnée Universitaire 2022-2023 Formation Filière Ingénieur ERME Module: Automatique Série N° 3kenza laghm100% (1)
- AAC - Examen Final PDFDocument1 pageAAC - Examen Final PDFMed AdamPas encore d'évaluation
- TD4 AsservissementDocument2 pagesTD4 AsservissementELmokhtar Hamrouni0% (1)
- Méthodes OptiminisationDocument119 pagesMéthodes OptiminisationPabloPas encore d'évaluation
- Developpement LmitesDocument12 pagesDeveloppement LmitesJadli AissamPas encore d'évaluation
- Correction Des Exercices de TDDocument4 pagesCorrection Des Exercices de TDelmamoun1Pas encore d'évaluation
- Les Metiers Mecatronique ConvertiDocument38 pagesLes Metiers Mecatronique ConvertiAmin ChabchoubPas encore d'évaluation
- Capabilité MachineDocument12 pagesCapabilité MachineMohamed EL MaaroufiPas encore d'évaluation
- 08 - La Total Productive Maintenance (TPM)Document15 pages08 - La Total Productive Maintenance (TPM)Placide MEBIAME NDONGPas encore d'évaluation
- COURS Données Structurées SNTDocument2 pagesCOURS Données Structurées SNTBOQUET MarcPas encore d'évaluation
- Init Rob 1Document75 pagesInit Rob 1SaidPas encore d'évaluation
- 12 FiabiliteDocument3 pages12 FiabiliteAhmed NadiPas encore d'évaluation
- Variables Aléatoires Discrètes 1Document36 pagesVariables Aléatoires Discrètes 1Ahmed fattoumPas encore d'évaluation
- Maximum de MatièreDocument8 pagesMaximum de MatièreLaurent MansieuxPas encore d'évaluation
- Cas Loconet Instructions Jeu de SimulationDocument2 pagesCas Loconet Instructions Jeu de SimulationAliPas encore d'évaluation
- ControleDocument5 pagesControleEL Boukhrissi OtmanePas encore d'évaluation
- Probabilités Sur Un Ensemble FiniDocument7 pagesProbabilités Sur Un Ensemble FinisjaubertPas encore d'évaluation
- Cours7 PLDocument6 pagesCours7 PLismail elfraaniPas encore d'évaluation
- La théorie des jeux: Thrillers judiciaires de Katerina Carter, #2D'EverandLa théorie des jeux: Thrillers judiciaires de Katerina Carter, #2Pas encore d'évaluation
- Chapitre 6Document8 pagesChapitre 6mewguv Ahmed salekPas encore d'évaluation
- Chap4 - SLCI Modelisation Et DynamiqueDocument10 pagesChap4 - SLCI Modelisation Et DynamiqueRamzi MansouriPas encore d'évaluation
- Mpsi c2 Chap3 Fonction de TransfertDocument8 pagesMpsi c2 Chap3 Fonction de TransfertkamalPas encore d'évaluation
- CHAP 3 Régulation IndustrielleDocument15 pagesCHAP 3 Régulation IndustrielleNidal BestPas encore d'évaluation
- Integration Scei 2020Document2 pagesIntegration Scei 2020BalalaŇaŖîfPas encore d'évaluation
- Hors Erasmus 14 Pays, 31 Partenaires Argentine Brésil Erasmus 19 Pays, 38 PartenairesDocument2 pagesHors Erasmus 14 Pays, 31 Partenaires Argentine Brésil Erasmus 19 Pays, 38 PartenairesBalalaŇaŖîfPas encore d'évaluation
- IliasssDocument13 pagesIliasssBalalaŇaŖîf100% (1)
- PolytechDocument7 pagesPolytechBalalaŇaŖîfPas encore d'évaluation
- CcinpDocument12 pagesCcinpBalalaŇaŖîfPas encore d'évaluation
- Melangeur de Peinture Bi-AxialDocument18 pagesMelangeur de Peinture Bi-AxialBalalaŇaŖîfPas encore d'évaluation
- I - ResultatsDocument1 pageI - ResultatsBalalaŇaŖîfPas encore d'évaluation
- CNC Si MP 2019Document25 pagesCNC Si MP 2019BalalaŇaŖîfPas encore d'évaluation
- Génie InfoDocument2 pagesGénie InfoBalalaŇaŖîfPas encore d'évaluation
- Plaquette CCINPDocument8 pagesPlaquette CCINPBalalaŇaŖîfPas encore d'évaluation
- ENSIBSDocument13 pagesENSIBSBalalaŇaŖîfPas encore d'évaluation
- Cours 10Document4 pagesCours 10BalalaŇaŖîfPas encore d'évaluation
- Cours 14Document4 pagesCours 14BalalaŇaŖîfPas encore d'évaluation
- Cours 09Document9 pagesCours 09BalalaŇaŖîfPas encore d'évaluation
- Cours 04Document10 pagesCours 04BalalaŇaŖîfPas encore d'évaluation
- 03 Poster ReductionDocument1 page03 Poster ReductionBalalaŇaŖîfPas encore d'évaluation
- Exo MatricesDocument3 pagesExo MatricesBalalaŇaŖîfPas encore d'évaluation
- Cours 06Document4 pagesCours 06BalalaŇaŖîfPas encore d'évaluation
- 16 Poster Int paraDocument1 page16 Poster Int paraBalalaŇaŖîfPas encore d'évaluation
- Équations Et Inéquations - Exercices: UriolDocument3 pagesÉquations Et Inéquations - Exercices: UriolMinecraft ArabicPas encore d'évaluation
- Guide Santé SONEPAR ActifsDocument36 pagesGuide Santé SONEPAR ActifsmarcotkPas encore d'évaluation
- 1 1infra-1 2caracterDocument95 pages1 1infra-1 2caracterwzaydanPas encore d'évaluation
- Le Commerce Frontalier en Afrique CentraDocument525 pagesLe Commerce Frontalier en Afrique CentraVanessa HouingPas encore d'évaluation
- Manuel Utilisateur Configuration, Test Et Exécution de Programmes CNDocument348 pagesManuel Utilisateur Configuration, Test Et Exécution de Programmes CNetudes ameurplasticsPas encore d'évaluation
- La Planète Terre - SVTDocument45 pagesLa Planète Terre - SVTnsalemPas encore d'évaluation
- Fonds Mohammed VI Pour L'investissementDocument5 pagesFonds Mohammed VI Pour L'investissementasma asmaPas encore d'évaluation
- 1.SHP IntroDocument26 pages1.SHP Introfranck nzauPas encore d'évaluation
- CourDocument84 pagesCourKim Jae-hwaPas encore d'évaluation
- Lettre de MotivationDocument2 pagesLettre de MotivationbhhbsckPas encore d'évaluation
- Le Contrat de VenteDocument1 pageLe Contrat de VenteMr KhaleedPas encore d'évaluation
- Mob Chop 5Document56 pagesMob Chop 5Gérald LagnesPas encore d'évaluation
- 11 GranulatDocument32 pages11 GranulatFatre 1980Pas encore d'évaluation
- CALCUL GicleursDocument2 pagesCALCUL GicleursHvacdm CesPas encore d'évaluation
- PFE Covid 19 Et Le SIDocument21 pagesPFE Covid 19 Et Le SIHamza KaimaPas encore d'évaluation
- TD1.D1 EnvironnementDeTravail 1Document15 pagesTD1.D1 EnvironnementDeTravail 1Nasreddine MarzoukiPas encore d'évaluation
- Liason ChimiqueDocument7 pagesLiason Chimiquesalah mebrouk100% (1)
- COURS Excel 2007 GraphiqueDocument15 pagesCOURS Excel 2007 GraphiqueDje RachidPas encore d'évaluation
- Prevision de La Geometrie Des MoleculesDocument25 pagesPrevision de La Geometrie Des MoleculesNassima El MahniPas encore d'évaluation
- Le Travail SaisonnierDocument3 pagesLe Travail SaisonnierMohamed LaarjPas encore d'évaluation
- Luxembourg ChiffresDocument56 pagesLuxembourg ChiffresyeuminhPas encore d'évaluation
- Document 567901Document236 pagesDocument 567901Bayari ArPas encore d'évaluation
- 2016 04 16 Exercices Partage EquitableDocument4 pages2016 04 16 Exercices Partage EquitablemarwaPas encore d'évaluation
- CumentDocument8 pagesCumentDJARIETOU GOUEMPas encore d'évaluation
- Exposé Microbiologie AlimentaireDocument15 pagesExposé Microbiologie AlimentaireMohamed HamelPas encore d'évaluation
- Guide Installation RenolinkDocument2 pagesGuide Installation Renolinklacan illisiblePas encore d'évaluation
- Cours - HADERBACHE Bachir - Théories Des OrganisationsDocument94 pagesCours - HADERBACHE Bachir - Théories Des OrganisationsEsma BelguithPas encore d'évaluation
- Chaussures OrthopédiquesDocument12 pagesChaussures OrthopédiquesAmï NãPas encore d'évaluation