Vous aimerez peut-être aussi
- Capteurs CoursDocument8 pagesCapteurs CoursYoussef AkarnePas encore d'évaluation
- Capteurs PDFDocument22 pagesCapteurs PDFIngc AhmedPas encore d'évaluation
- Cours CapteurDocument43 pagesCours CapteurAmine ElazzabiPas encore d'évaluation
- Corrigé Sujet TD 3Document4 pagesCorrigé Sujet TD 3Meziane AchrafPas encore d'évaluation
- DEMARRAGE ET VARIATION DE VITESSE ProfDocument18 pagesDEMARRAGE ET VARIATION DE VITESSE ProfDDDDDDDPas encore d'évaluation
- Transducteurs 1 - Capteurs PDFDocument27 pagesTransducteurs 1 - Capteurs PDFpierre_maréchalPas encore d'évaluation
- Cours1 Machines ElectriquesDocument108 pagesCours1 Machines ElectriquesGhita Mabrour100% (1)
- Les CapteursDocument6 pagesLes CapteursHmouma Dahmane100% (1)
- Cours Sur Les Codeurs Wa333ar PDFDocument9 pagesCours Sur Les Codeurs Wa333ar PDFtarikmlilasPas encore d'évaluation
- Chapitre I Notions de Base Sur Les CapteursDocument10 pagesChapitre I Notions de Base Sur Les CapteursEmmanuel MaxPas encore d'évaluation
- Cinematique - Mécanique Des FluidesDocument13 pagesCinematique - Mécanique Des FluidesSalma BrbPas encore d'évaluation
- CapteurintroductionDocument34 pagesCapteurintroductionABdelkader OutzourhitPas encore d'évaluation
- Chapitre III.2 Modelisation Des Systemes Statiques Et DynamiquesDocument38 pagesChapitre III.2 Modelisation Des Systemes Statiques Et DynamiquesAnis BounaslaPas encore d'évaluation
- 1 - La Mesure Et Les Capteurs Industriels...Document19 pages1 - La Mesure Et Les Capteurs Industriels...Lelouch Vi MaghribiaPas encore d'évaluation
- Support Mesures Lectriques PDFDocument38 pagesSupport Mesures Lectriques PDFsouadPas encore d'évaluation
- TP Capteur InductifDocument13 pagesTP Capteur Inductifelmajdi chaymae100% (1)
- Cours ElectrotechniqueDocument229 pagesCours Electrotechniquerempillon kiralPas encore d'évaluation
- cours-MASDocument12 pagescours-MASfouadPas encore d'évaluation
- C83 CapteursDocument5 pagesC83 CapteursAmara NejiPas encore d'évaluation
- TD4 CapteursDocument2 pagesTD4 CapteursRabah AmidiPas encore d'évaluation
- Capteurs Caractéristiques Générales - ENSTAB CoursewareDocument140 pagesCapteurs Caractéristiques Générales - ENSTAB CoursewareTunENSTAB100% (2)
- Systemes Echantillonnés D'ordre 2Document2 pagesSystemes Echantillonnés D'ordre 2khayyamPas encore d'évaluation
- Etude Et Simulation D'un Capteur de Pression CapacitifDocument79 pagesEtude Et Simulation D'un Capteur de Pression CapacitifHassan B'ouPas encore d'évaluation
- MEMS C QuoiDocument56 pagesMEMS C QuoiIsmail ErrachidPas encore d'évaluation
- Capteur - VitesseDocument3 pagesCapteur - Vitessezaki0% (1)
- CodeursDocument4 pagesCodeursDriss El Khoukhi100% (1)
- Web Cours Thermographie IRDocument136 pagesWeb Cours Thermographie IRBelalia100% (1)
- 02 CapteursDocument85 pages02 CapteursSidahmed LarbaouiPas encore d'évaluation
- Cours Traitement Signal P1Document59 pagesCours Traitement Signal P1NourDine Ait ZenguiPas encore d'évaluation
- Regulation Numerique TempDocument36 pagesRegulation Numerique TempDK KDPas encore d'évaluation
- Les Capteur de Position Et DeplacementDocument12 pagesLes Capteur de Position Et DeplacementminoPas encore d'évaluation
- Capteurs de Vitesse Et Direction Du VentDocument5 pagesCapteurs de Vitesse Et Direction Du VentMed AzzouziPas encore d'évaluation
- Le Champ TournantDocument8 pagesLe Champ TournantimadPas encore d'évaluation
- PROJET Bras RobotiseDocument26 pagesPROJET Bras RobotiseFAROK businessPas encore d'évaluation
- Les CapteursDocument6 pagesLes Capteursmachine tunisiePas encore d'évaluation
- Vehicule Electrique Etude Et Modélisation D'une Machine Synchrone À Aimant Permanent PDFDocument217 pagesVehicule Electrique Etude Et Modélisation D'une Machine Synchrone À Aimant Permanent PDFB. BENCHAAPas encore d'évaluation
- Effets Des CapteursDocument7 pagesEffets Des Capteurssyoudi100% (1)
- DM10 AcceleromètreDocument3 pagesDM10 AcceleromètreLe dab Des îlesPas encore d'évaluation
- Generalites Sur Les CapteursDocument14 pagesGeneralites Sur Les Capteurssalahgim100% (1)
- Chapitre 5 Systeme de Premier OrdreDocument9 pagesChapitre 5 Systeme de Premier OrdremoipopPas encore d'évaluation
- M1 Electronique Energie Electrique Automatique - Mention EEA 2021-2022Document26 pagesM1 Electronique Energie Electrique Automatique - Mention EEA 2021-2022hit master100% (1)
- 00 Résumé TransmettreDocument2 pages00 Résumé TransmettreSamir Bouhiyadi SamirPas encore d'évaluation
- Cours Capteurs Et Métrologie - DR - BENYETTOU - LoutfiDocument36 pagesCours Capteurs Et Métrologie - DR - BENYETTOU - LoutfiEmmad Abdelkarim100% (2)
- 2electronique de PuissanceDocument240 pages2electronique de PuissanceYassine Zahar100% (1)
- 6 - Conditionnement Du SignalDocument13 pages6 - Conditionnement Du SignalbaazizPas encore d'évaluation
- 08 - TD 03Document3 pages08 - TD 03Abdelwehed AmelPas encore d'évaluation
- Capteurs PositionDocument16 pagesCapteurs PositionHifdi AyaPas encore d'évaluation
- L3 AUT Cours Capteur CHM ch5Document14 pagesL3 AUT Cours Capteur CHM ch5Ishak BoukhPas encore d'évaluation
- Capteurs Intelligents Part4Document82 pagesCapteurs Intelligents Part4Simo AbkariPas encore d'évaluation
- Les Appareils de Mesure en Courant AlternatifDocument6 pagesLes Appareils de Mesure en Courant AlternatifAnonymous ap1THdqd3PPas encore d'évaluation
- Les CapteursDocument32 pagesLes CapteursNabilBouabana100% (2)
- Expose DetecteursDocument15 pagesExpose DetecteursPatrice CamaraPas encore d'évaluation
- RC - CRDocument13 pagesRC - CRHamza NadirPas encore d'évaluation
- 3-Codeurs Rotatifs Industriels ProfDocument6 pages3-Codeurs Rotatifs Industriels ProfSalahDin ELPas encore d'évaluation
- Chapitre Systemes ÉchantillonnesDocument14 pagesChapitre Systemes ÉchantillonnesAnonymous kIoMGEPas encore d'évaluation
- Presentation - Electronique - PuissanceDocument61 pagesPresentation - Electronique - PuissanceBekir MouradPas encore d'évaluation
- Automatique Avancee Chapitre3 2020 2021Document29 pagesAutomatique Avancee Chapitre3 2020 2021dhdhPas encore d'évaluation
- Expériences et observations sur l'électricité faites à Philadelphie en AmériqueD'EverandExpériences et observations sur l'électricité faites à Philadelphie en AmériquePas encore d'évaluation
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- Théorie et conception des filtres analogiques, 2e édition: Avec MatlabD'EverandThéorie et conception des filtres analogiques, 2e édition: Avec MatlabPas encore d'évaluation
- Les Methodes Et Les Outils de La Qualite en SanteDocument29 pagesLes Methodes Et Les Outils de La Qualite en SantentojoniainaPas encore d'évaluation
- 02-Alimentation StabiliséeDocument10 pages02-Alimentation StabiliséeAbdo Lach100% (3)
- 19-Capteurs 3Document15 pages19-Capteurs 3Abdo LachPas encore d'évaluation
- 18 CapteursDocument9 pages18 CapteursRudy ValéryPas encore d'évaluation
- 02 Alimenter ElecDocument28 pages02 Alimenter ElecAbdo LachPas encore d'évaluation
- 23-01 Capteurs EX 5Document3 pages23-01 Capteurs EX 5Abdo LachPas encore d'évaluation
- 18 Capteurs3Document7 pages18 Capteurs3Oussama El MkhayarPas encore d'évaluation
- 18 CapteursDocument9 pages18 CapteursRudy ValéryPas encore d'évaluation
- 23 Capteurs Cours 4Document8 pages23 Capteurs Cours 4Abdo LachPas encore d'évaluation
- 18 Capteurs3Document7 pages18 Capteurs3Oussama El MkhayarPas encore d'évaluation
- 19-Capteurs 3Document15 pages19-Capteurs 3Abdo LachPas encore d'évaluation
- 18 CapteursDocument9 pages18 CapteursRudy ValéryPas encore d'évaluation
- 23-01 Capteurs EX 5Document3 pages23-01 Capteurs EX 5Abdo LachPas encore d'évaluation
- 04 Boit Vitess Tour Corrige ÇÇÇÇÇÇÇÇÇÇÇDocument7 pages04 Boit Vitess Tour Corrige ÇÇÇÇÇÇÇÇÇÇÇAbdo LachPas encore d'évaluation
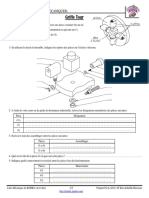
- Griffe de Tour PDFDocument3 pagesGriffe de Tour PDFAbdo LachPas encore d'évaluation
- 09 Maquette Boite VitessesDocument5 pages09 Maquette Boite VitessesAbdo LachPas encore d'évaluation
- 09 Maquette Boite VitessesDocument7 pages09 Maquette Boite VitessesBrahim Achayfad100% (1)
- 04 Boit Vitess Tour Corrige ÇÇÇÇÇÇÇÇÇÇÇDocument7 pages04 Boit Vitess Tour Corrige ÇÇÇÇÇÇÇÇÇÇÇAbdo LachPas encore d'évaluation
- Electricité 5Document34 pagesElectricité 5Emilie NGOSONGPas encore d'évaluation
- Amplimicronde 23 24 2Document92 pagesAmplimicronde 23 24 2samiakouame21Pas encore d'évaluation
- 2118393r3 Senographe DMR V2 ASMDocument283 pages2118393r3 Senographe DMR V2 ASMEmmanuel Ramirez100% (1)
- Cours Modélisation - 01 - 12 - 2021Document87 pagesCours Modélisation - 01 - 12 - 2021dadddPas encore d'évaluation
- ENICa InfotroniqueDocument12 pagesENICa Infotroniqueyessine ketataPas encore d'évaluation
- Facture SFR Corinne 2015Document6 pagesFacture SFR Corinne 2015Fiches DepaiesPas encore d'évaluation
- TD3-En-Elements de Reponse, Seance 8 (Ex1+Ex2), Amari AzizDocument6 pagesTD3-En-Elements de Reponse, Seance 8 (Ex1+Ex2), Amari AzizMahdi LahdiliPas encore d'évaluation
- Le Cablage Electrique Du Reseau Miniature (Loco Revue Hors-Serie. 3 (2008)Document84 pagesLe Cablage Electrique Du Reseau Miniature (Loco Revue Hors-Serie. 3 (2008)Sadok KaddouriPas encore d'évaluation
- 80400F - Diffuseur Sonore Sonos Blanc Base Courte PSS - 0089Document1 page80400F - Diffuseur Sonore Sonos Blanc Base Courte PSS - 0089negotral.oussamaPas encore d'évaluation
- TP N°.2.Simulation Pspice Des Circuits (Diode - Bias Point)Document4 pagesTP N°.2.Simulation Pspice Des Circuits (Diode - Bias Point)toufik bendibPas encore d'évaluation
- Cours Circuits Numériques (Semestre 2) 1APDocument72 pagesCours Circuits Numériques (Semestre 2) 1APBruno PierrePas encore d'évaluation
- Hac HFW1500CM (A) S2Document3 pagesHac HFW1500CM (A) S2marck hugo100% (1)
- TP2 Electronique de PussanceDocument5 pagesTP2 Electronique de Pussancemohamed kaddaPas encore d'évaluation
- Serie N2 TD ELP 3ELN ADocument4 pagesSerie N2 TD ELP 3ELN Ahamzabenaldjia22Pas encore d'évaluation
- VarPlus Logic Manuel D'utilisationDocument48 pagesVarPlus Logic Manuel D'utilisationAdil ElhanafiPas encore d'évaluation
- XSAV - Manuel DidactiqueDocument25 pagesXSAV - Manuel DidactiqueFox BenPas encore d'évaluation
- Rapport de StageDocument39 pagesRapport de StageMahamadou Roufai ChipkaoPas encore d'évaluation
- CH 2 Modélisation de La MAS Et de Son AlimentationDocument23 pagesCH 2 Modélisation de La MAS Et de Son AlimentationIlyes IsaacPas encore d'évaluation
- Introduction Aux Circuits FPGAs-Partie 1Document5 pagesIntroduction Aux Circuits FPGAs-Partie 1Mohamed Amine HAMDOUDPas encore d'évaluation
- Epreuve Zéro DE CEIN PB F3 2024Document4 pagesEpreuve Zéro DE CEIN PB F3 2024LoÏC MINTO'OPas encore d'évaluation
- AutomateDocument72 pagesAutomatetinhinane hadjouPas encore d'évaluation
- MG3600ser OnlineManual Mac FR V02Document702 pagesMG3600ser OnlineManual Mac FR V02Kev InPas encore d'évaluation
- Diapo EtudiantsDocument68 pagesDiapo EtudiantsStep WeyPas encore d'évaluation
- TP2 - Commande Systemes Electriques II - OnLineDocument7 pagesTP2 - Commande Systemes Electriques II - OnLineKamel TayahiPas encore d'évaluation
- Brochure BST e - v08 15Document8 pagesBrochure BST e - v08 15ArezkiPas encore d'évaluation
- VF16 M Thyssen (OND06) - Manuel D'installation - FR - Du 25 01 01 (7255) JDocument44 pagesVF16 M Thyssen (OND06) - Manuel D'installation - FR - Du 25 01 01 (7255) JMinatas MiraPas encore d'évaluation
- 1cm3jftoi 531976Document4 pages1cm3jftoi 531976Hamadi DialloPas encore d'évaluation
- TD1Exercice Hacheur Série Electronique de Puissance AvancéeDocument3 pagesTD1Exercice Hacheur Série Electronique de Puissance AvancéeblbmalekPas encore d'évaluation
- Ex - Circuit - Électrique (2) TriphDocument2 pagesEx - Circuit - Électrique (2) TriphRaja BenabdallahPas encore d'évaluation
- Modélisation de La Machine Synchrone À Aimant PermanentDocument10 pagesModélisation de La Machine Synchrone À Aimant PermanentElalami AsmaePas encore d'évaluation