Vous aimerez peut-être aussi
- RADAR CoursDocument25 pagesRADAR Coursimad ArsPas encore d'évaluation
- Exemples Pratiques GeoradarDocument16 pagesExemples Pratiques GeoradarBenabderrahmane Nacereddine NaçerPas encore d'évaluation
- RadarDocument43 pagesRadarYousra Hamoumi0% (1)
- Chap 5Document78 pagesChap 5Hanane NasrPas encore d'évaluation
- Polycopie CNA CDDocument164 pagesPolycopie CNA CDato ndongo fabricePas encore d'évaluation
- Transmetteur Et Capteur RadarDocument7 pagesTransmetteur Et Capteur RadarAladin MwimbiPas encore d'évaluation
- Neffati TAS Cours S A I OcrDocument23 pagesNeffati TAS Cours S A I OcrAntonio Saba0% (1)
- MOOC Fiche Antenne v4Document5 pagesMOOC Fiche Antenne v4fadlallahPas encore d'évaluation
- TP-Optique v2 PDFDocument65 pagesTP-Optique v2 PDFمروة حسانPas encore d'évaluation
- RadarDocument129 pagesRadarChaimae IdrissiPas encore d'évaluation
- Cours Antennes IntelligentesDocument42 pagesCours Antennes IntelligentesFaissal AkarimPas encore d'évaluation
- Poly TP TS 16 17Document15 pagesPoly TP TS 16 17Ayoub Elfarwah0% (1)
- Compression D ImpulsionDocument61 pagesCompression D ImpulsionMed Amine RhaiemPas encore d'évaluation
- Chapitre 02 2Document22 pagesChapitre 02 2Ahmed BougheraraPas encore d'évaluation
- Etude Paramétrique Des Antennes Patchs Rectangulaires Alimentées Par ProximitéDocument5 pagesEtude Paramétrique Des Antennes Patchs Rectangulaires Alimentées Par ProximitéYossef ARPas encore d'évaluation
- Cofrend Fiche UltrasonsDocument2 pagesCofrend Fiche UltrasonsFethi BELOUIS100% (1)
- Fiche Diagraphie Gamma-RayDocument1 pageFiche Diagraphie Gamma-RayNaruto & SasukePas encore d'évaluation
- Radar de contrأ´le routierDocument4 pagesRadar de contrأ´le routierمساعدية أبو مجيب الرحمانPas encore d'évaluation
- Adaptation (Notion 6)Document25 pagesAdaptation (Notion 6)MouadSamaPas encore d'évaluation
- La Réception Radiofréquence Définie Par LogicielDocument28 pagesLa Réception Radiofréquence Définie Par LogicielMichelchaPas encore d'évaluation
- Radio Propagation Et Antennes Ok2Document219 pagesRadio Propagation Et Antennes Ok2Jacques NdavaroPas encore d'évaluation
- La GéophysiqueDocument29 pagesLa GéophysiquetinaPas encore d'évaluation
- Transmission Et Stockage de L'informationDocument29 pagesTransmission Et Stockage de L'informationludovicPas encore d'évaluation
- Rapport de Reception Technique D'une Station BtsDocument10 pagesRapport de Reception Technique D'une Station BtsAnonymous l1RfbLetxw100% (1)
- Ultrasons: NiveauDocument32 pagesUltrasons: NiveauKarim HaddadPas encore d'évaluation
- Expose de TeledetectionDocument21 pagesExpose de TeledetectionananasPas encore d'évaluation
- ControleAttitudeMagneto MatrauDocument19 pagesControleAttitudeMagneto Matraunab05Pas encore d'évaluation
- KPI Essai Routier de BaseDocument3 pagesKPI Essai Routier de BaseN'guessan Dominique KouassiPas encore d'évaluation
- Techniques RadarsDocument14 pagesTechniques RadarsLüna SînaPas encore d'évaluation
- Cours de Géophysique 2 L3Document14 pagesCours de Géophysique 2 L3OtayeckPas encore d'évaluation
- CourstldDocument68 pagesCourstldboipouPas encore d'évaluation
- 1 IntroductionDVDocument70 pages1 IntroductionDVYoussef AliPas encore d'évaluation
- Complements CND-EMIDocument75 pagesComplements CND-EMIanouar alaouiPas encore d'évaluation
- Exposé Sur GlonassDocument13 pagesExposé Sur GlonassFati ZohraPas encore d'évaluation
- N FMDocument53 pagesN FMSaida Essoufi100% (1)
- UranuimDocument40 pagesUranuimOussama DhahriPas encore d'évaluation
- Antennes OndesDocument31 pagesAntennes OndesOthman Nchifa100% (1)
- Polarimetrie RadarDocument106 pagesPolarimetrie RadarVincent Allaz100% (1)
- 4-2-Avantages de La TélédétectionDocument3 pages4-2-Avantages de La TélédétectioncoulibalyPas encore d'évaluation
- These Franck ChebilaDocument141 pagesThese Franck ChebilaHudali NabilPas encore d'évaluation
- These KacemiDocument194 pagesThese KacemiyozaphoPas encore d'évaluation
- Chap 1 Cours RFDocument38 pagesChap 1 Cours RFNadir Ait MoussaPas encore d'évaluation
- TPgoniometremesureindicen PDFDocument5 pagesTPgoniometremesureindicen PDF지미라kim miraPas encore d'évaluation
- Cours 2013 LELEC2910 PDFDocument2 pagesCours 2013 LELEC2910 PDFKIBITOPas encore d'évaluation
- TransmissionDocument76 pagesTransmissionBRANDON PEWAHOPas encore d'évaluation
- Simulation Et Implémentation en Temps Réel de La Technique OFDM en Utilisant Le Processeur DSP C6713Document89 pagesSimulation Et Implémentation en Temps Réel de La Technique OFDM en Utilisant Le Processeur DSP C6713Sokhna Fatou GueyePas encore d'évaluation
- Chapitre1 Les Ondes ÉlectromagnétiquesDocument4 pagesChapitre1 Les Ondes ÉlectromagnétiquesOmri OmarPas encore d'évaluation
- TP Étudier La Propagation D'une Onde UltrasonoreDocument1 pageTP Étudier La Propagation D'une Onde UltrasonoreMohieddine KhailiPas encore d'évaluation
- Introduction TDSDocument43 pagesIntroduction TDSOumaïma El AbidiPas encore d'évaluation
- Cours Géophysique ISTP 2022Document141 pagesCours Géophysique ISTP 2022YINKUANIX FFPas encore d'évaluation
- Canaux Non Idéaux Partie 2Document21 pagesCanaux Non Idéaux Partie 2Lÿdîã Kâbylë100% (1)
- Syllabus Systèmes de RadionavigationsDocument2 pagesSyllabus Systèmes de Radionavigationss24Pas encore d'évaluation
- Série de TD 1Document3 pagesSérie de TD 1Děmøïšěllë RãnPas encore d'évaluation
- CapteurDocument17 pagesCapteurBelachmi HamzaPas encore d'évaluation
- Cours ST M1 ST13Document18 pagesCours ST M1 ST13مسعود دزايرPas encore d'évaluation
- OooooooooooDocument85 pagesOoooooooooozeineb ghobelPas encore d'évaluation
- TM 1515364 PDFDocument4 pagesTM 1515364 PDFAnge KamguengPas encore d'évaluation
- Cours LesAntennesDocument131 pagesCours LesAntennesSam MogsamPas encore d'évaluation
- Chap 6 EmetteurDocument15 pagesChap 6 EmetteurOumar Mandodjo100% (1)
- Theorie de RadarDocument22 pagesTheorie de RadarAdnen AissaouiPas encore d'évaluation
- крюков ДиссертацияDocument127 pagesкрюков ДиссертацияHa NanePas encore d'évaluation
- principesBaseReseau EtudiantDocument14 pagesprincipesBaseReseau EtudiantHa NanePas encore d'évaluation
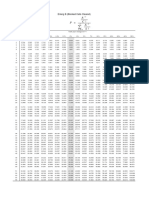
- Erlang B TableDocument3 pagesErlang B TableHa NanePas encore d'évaluation
- AmplificationDocument25 pagesAmplificationHa NanePas encore d'évaluation
- Télécommunication SpatialDocument31 pagesTélécommunication SpatialHa NanePas encore d'évaluation
- Cours 2Document13 pagesCours 2Ha NanePas encore d'évaluation
- CH 2 - Véhicule Spatial Et OrbitesDocument37 pagesCH 2 - Véhicule Spatial Et OrbitesHa NanePas encore d'évaluation
- CDF SSA 2016 Ed 04-2016Document254 pagesCDF SSA 2016 Ed 04-2016Ha NanePas encore d'évaluation
- Cours 2Document13 pagesCours 2Ha NanePas encore d'évaluation
- Chapitre 2 Token Ring ConvertiDocument27 pagesChapitre 2 Token Ring ConvertiHa NanePas encore d'évaluation
- Chapitre N° 01Document3 pagesChapitre N° 01Ha NanePas encore d'évaluation
- Chapitre N° 03Document3 pagesChapitre N° 03Ha NanePas encore d'évaluation
- TP Charge Et DéchargeDocument14 pagesTP Charge Et DéchargeHa NanePas encore d'évaluation
- Video Et Audio Sur IP - 1Document27 pagesVideo Et Audio Sur IP - 1Ha NanePas encore d'évaluation
- Corrigé de lexamen-TS571Document3 pagesCorrigé de lexamen-TS571Ha NanePas encore d'évaluation
- Application de l'IoT Dans La Détection D'anomalie-ConvertiDocument88 pagesApplication de l'IoT Dans La Détection D'anomalie-ConvertiHa Nane100% (1)
- RTL Guide ErgoDocument16 pagesRTL Guide ErgoHa NanePas encore d'évaluation
- TD ReseauxDocument3 pagesTD ReseauxHa NanePas encore d'évaluation
- Crypto Cour4Document21 pagesCrypto Cour4Ha NanePas encore d'évaluation
- L3 2013 2014 TD DHCP CorrigeDocument3 pagesL3 2013 2014 TD DHCP CorrigeHa Nane50% (2)
- Crypto Cour2Document30 pagesCrypto Cour2Ha NanePas encore d'évaluation
- Memoire Master2Document43 pagesMemoire Master2lazhar beghouraPas encore d'évaluation
- Ondes Et ParticulesDocument14 pagesOndes Et ParticulesludovicPas encore d'évaluation
- DS6 CorrigéDocument10 pagesDS6 Corrigékunkunn0021Pas encore d'évaluation
- IndexDocument2 pagesIndexELMIR ADILPas encore d'évaluation
- Physique1 CorrigeDocument14 pagesPhysique1 CorrigeAmine PharmPas encore d'évaluation
- Filtrage LinéaireDocument16 pagesFiltrage LinéairePatrick NgakouPas encore d'évaluation
- 2éme Bac StmeDocument3 pages2éme Bac StmeAicha Daou100% (1)
- corrigeExoOndes 1415Document3 pagescorrigeExoOndes 1415khadijaPas encore d'évaluation
- 4 Systeme D Irrigation Chaine D Acquisition Numerique Capteurs de Niveau C A N Interne Du 16f877 CorrigeDocument16 pages4 Systeme D Irrigation Chaine D Acquisition Numerique Capteurs de Niveau C A N Interne Du 16f877 CorrigeFred AngoPas encore d'évaluation
- RadioelectricitéDocument83 pagesRadioelectricitéghannaynabil7468Pas encore d'évaluation
- 255Document7 pages255Bahi HolmesPas encore d'évaluation
- Livre Prof spc3 Chap11Document18 pagesLivre Prof spc3 Chap11kriefPas encore d'évaluation
- CC D'antenne Et Telecom Spacial TC1 - 2022Document8 pagesCC D'antenne Et Telecom Spacial TC1 - 2022Fotcha EricPas encore d'évaluation
- Spectrophotometrie CoursDocument27 pagesSpectrophotometrie Coursdoxy20100% (2)
- C13 A2 Rayons X CorDocument1 pageC13 A2 Rayons X CorDJEUDJIOPas encore d'évaluation
- Tdelct 06Document3 pagesTdelct 06Sinda Ben OthmenPas encore d'évaluation
- Controle N1 Semestre 1 2BAC PC SM BIOFDocument134 pagesControle N1 Semestre 1 2BAC PC SM BIOFwaclapayPas encore d'évaluation
- Physiques SuiteDocument6 pagesPhysiques SuiteBertin BakariPas encore d'évaluation
- TP 1 Filtre Et RLC 2022 2023Document8 pagesTP 1 Filtre Et RLC 2022 2023Boualem MestafaPas encore d'évaluation
- Contrôle 25Document3 pagesContrôle 25nabla199100% (1)
- Polycopie SMDocument209 pagesPolycopie SMMery Em100% (1)
- Quelques Exercices Avec SolutionsDocument15 pagesQuelques Exercices Avec SolutionsGHEZLAOUI AymenePas encore d'évaluation
- Questions de Revision de Radio-Tv 1°semestre 2022-2023Document4 pagesQuestions de Revision de Radio-Tv 1°semestre 2022-2023Oneil PrestonPas encore d'évaluation
- Les Ondes1Document2 pagesLes Ondes1EL Omrani Said100% (1)
- cpp11 PDFDocument24 pagescpp11 PDFPatience ImanePas encore d'évaluation
- 2008 Pondichery Exo3 Spe Correction Flute de Pan 4ptsDocument2 pages2008 Pondichery Exo3 Spe Correction Flute de Pan 4ptsla physique selon le programme Français100% (1)
- OMPPBIOFDocument3 pagesOMPPBIOFYassir Ksakass25% (4)
- Optique OndulatoireDocument6 pagesOptique OndulatoireEnorck Cortez AgbalessiPas encore d'évaluation
- Cours P12-P13-P14 - TermS 2023Document13 pagesCours P12-P13-P14 - TermS 2023sarrbinette25Pas encore d'évaluation
- 13 Ondes SupDocument2 pages13 Ondes Suptos yesPas encore d'évaluation