Vous aimerez peut-être aussi
- 5wa3w-Examen Special Physique3 2010 2011Document4 pages5wa3w-Examen Special Physique3 2010 2011Manizan Emmanuel YaoPas encore d'évaluation
- Exercices d'optique et d'électromagnétismeD'EverandExercices d'optique et d'électromagnétismeÉvaluation : 5 sur 5 étoiles5/5 (1)
- Exercices d'intégrales de lignes, de surfaces et de volumesD'EverandExercices d'intégrales de lignes, de surfaces et de volumesPas encore d'évaluation
- Fiche de TD 5 Elect Avec CorrigéDocument11 pagesFiche de TD 5 Elect Avec Corrigéforex forexPas encore d'évaluation
- TD2 2020 2021Document3 pagesTD2 2020 2021nouraPas encore d'évaluation
- TD2 - Meca1 - Sigma - 2021 - CopieDocument3 pagesTD2 - Meca1 - Sigma - 2021 - Copieblandinette momoPas encore d'évaluation
- TD 1-4Document4 pagesTD 1-4Raouf Zaouch50% (2)
- 2 - Exo - Magnétisme (1 - 0)Document19 pages2 - Exo - Magnétisme (1 - 0)KarterPas encore d'évaluation
- CLUB PREPA Polyetch Constantine - Physique IIIDocument25 pagesCLUB PREPA Polyetch Constantine - Physique IIIRomaissa Loulhaci100% (1)
- Electromagnetisme Examen 1ere Session 2013 1Document7 pagesElectromagnetisme Examen 1ere Session 2013 1Mohamed OmarPas encore d'évaluation
- 2 ChamplectrostatiqueDocument11 pages2 ChamplectrostatiquealidemesPas encore d'évaluation
- Ex CorrDocument55 pagesEx CorrKhalid ZegPas encore d'évaluation
- Cours-Séries EntièresDocument20 pagesCours-Séries Entièresm50adjPas encore d'évaluation
- Exercice 1: Champ Magnétique TerrestreDocument2 pagesExercice 1: Champ Magnétique Terrestrethouabtia saief100% (2)
- TD Electricite3 P2013 Nafidi-SMP4Document16 pagesTD Electricite3 P2013 Nafidi-SMP4Samira KaPas encore d'évaluation
- ReseauDocument8 pagesReseaupaulPas encore d'évaluation
- Mecanique de Solide - ExamDocument2 pagesMecanique de Solide - ExamHenAbdoPas encore d'évaluation
- Examen Normal Mécanique Du Point SMPC 2018 2019correctionDocument7 pagesExamen Normal Mécanique Du Point SMPC 2018 2019correctionRachif MesrarPas encore d'évaluation
- TD E7 Filtrage PDFDocument17 pagesTD E7 Filtrage PDFJoseph OnguenePas encore d'évaluation
- TD 1 ElectrostatiqueDocument4 pagesTD 1 ElectrostatiquenouraPas encore d'évaluation
- Chap7 Ex Cable CoaxialDocument12 pagesChap7 Ex Cable Coaxiallina derbikhPas encore d'évaluation
- Corr SUP TD CIN PSDocument2 pagesCorr SUP TD CIN PSSafae SabirPas encore d'évaluation
- TD 02 Meca Point ING ST JeanDocument7 pagesTD 02 Meca Point ING ST JeanMiguel AngePas encore d'évaluation
- Devoir de Ratrapage Mecanique Du PointDocument2 pagesDevoir de Ratrapage Mecanique Du PointPreparation TafemPas encore d'évaluation
- TD 1 MagDocument2 pagesTD 1 MagAbir BlPas encore d'évaluation
- MECANIQUEDocument38 pagesMECANIQUESoufianePas encore d'évaluation
- Optique Ondulatoire Examens 01Document4 pagesOptique Ondulatoire Examens 01DjamelBenlakehalPas encore d'évaluation
- Série 1 ElectrostatiqueDocument5 pagesSérie 1 Electrostatiquesarra jebali100% (1)
- TD Série1 TorseursDocument2 pagesTD Série1 TorseursEl Matador100% (1)
- Les Filtres PassifsDocument12 pagesLes Filtres PassifsAymen KtataPas encore d'évaluation
- Phy 301Document78 pagesPhy 301MYMYPas encore d'évaluation
- Exercice Cinématique Solide Avec CorrectionDocument6 pagesExercice Cinématique Solide Avec Correctionomar EL AADDAMPas encore d'évaluation
- ElectroMagn EP 16 07-08 S 2 v1Document5 pagesElectroMagn EP 16 07-08 S 2 v1Marvis NzPas encore d'évaluation
- INP Meca TDDocument41 pagesINP Meca TDHassan HallaouaPas encore d'évaluation
- Fiche de TD 3 Elect Avec CorrigéDocument7 pagesFiche de TD 3 Elect Avec Corrigédahoooo100% (1)
- Exercices Corriges Mecanique Du PointDocument124 pagesExercices Corriges Mecanique Du PointarmandgahoungaPas encore d'évaluation
- Electrostatique ApplicationsDocument41 pagesElectrostatique ApplicationsTarek AmarPas encore d'évaluation
- Corde Vibrante TD PDFDocument4 pagesCorde Vibrante TD PDFHich Em0% (1)
- TD1 L3S6 - 20-21Document4 pagesTD1 L3S6 - 20-21Ilias aatikPas encore d'évaluation
- Exercices DelectrostatiqueDocument16 pagesExercices Delectrostatiqueadjidavibruno7Pas encore d'évaluation
- Analogie Électrostatique Et MagnétostatqueDocument4 pagesAnalogie Électrostatique Et MagnétostatqueNesrin Mhd100% (2)
- Rachid Mesrar Aplli Cine D Solide PDFDocument10 pagesRachid Mesrar Aplli Cine D Solide PDFAhmed Hamada100% (2)
- Application Des Lois de KirchhoffDocument2 pagesApplication Des Lois de KirchhoffAnonymous O7VirK100% (1)
- TP - N01 - Serie de FourierDocument1 pageTP - N01 - Serie de FourierMoh EddPas encore d'évaluation
- Correction de La Série N°3 de MPM - 2020-2021Document9 pagesCorrection de La Série N°3 de MPM - 2020-2021MounirPas encore d'évaluation
- S5 Contrôle Physique Des Matériaux FSSMDocument4 pagesS5 Contrôle Physique Des Matériaux FSSMDaoud El Caid100% (1)
- 21 Exercices en Electrostatique Et MagnétostatiqueDocument9 pages21 Exercices en Electrostatique Et MagnétostatiqueAfkir HamzaPas encore d'évaluation
- SLCI - Analyse FréquentielleDocument10 pagesSLCI - Analyse FréquentielleBah KhalilPas encore d'évaluation
- 4 - Problemes Corrigés D'electrotechniquelDocument10 pages4 - Problemes Corrigés D'electrotechniquelblbmalekPas encore d'évaluation
- TP Mise en Évidence Et Propriétés de L'auto-InductionDocument5 pagesTP Mise en Évidence Et Propriétés de L'auto-Inductionferdaows laboudiPas encore d'évaluation
- Rappel Plus TD1Document11 pagesRappel Plus TD1Anouar MatiPas encore d'évaluation
- Série 1-PSTDocument2 pagesSérie 1-PSTAnouar MatiPas encore d'évaluation
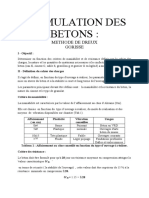
- Formulation Du Beton Methode de DREUX PDFDocument4 pagesFormulation Du Beton Methode de DREUX PDFTaha AsPas encore d'évaluation
- Série 1-PSTDocument2 pagesSérie 1-PSTAnouar MatiPas encore d'évaluation
- Corrigé Série 1Document15 pagesCorrigé Série 1Anouar MatiPas encore d'évaluation
- Chapitre 1Document15 pagesChapitre 1Anouar MatiPas encore d'évaluation
- TP MDCDocument20 pagesTP MDCBenali Alaa EddinePas encore d'évaluation
- Chapitre2 2Document18 pagesChapitre2 2Ibrahim AmichlaPas encore d'évaluation
- Repartition Groupes ELTDocument24 pagesRepartition Groupes ELTAnouar MatiPas encore d'évaluation
- Annexe Essai Au Cone EnspsDocument2 pagesAnnexe Essai Au Cone EnspsAnouar MatiPas encore d'évaluation
- TP Mds N02 PDFDocument4 pagesTP Mds N02 PDFLeghrieb RaidPas encore d'évaluation
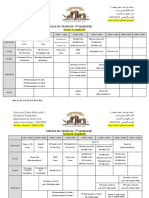
- GC-Emploi Du Temps - S1 - L2 L3 - 2021 2022Document5 pagesGC-Emploi Du Temps - S1 - L2 L3 - 2021 2022Anouar MatiPas encore d'évaluation
- TP MDSDocument18 pagesTP MDSĂm Ęl100% (1)
- TP Mds N02 PDFDocument4 pagesTP Mds N02 PDFLeghrieb RaidPas encore d'évaluation
- TP1 PerméabilitéDocument8 pagesTP1 PerméabilitéIbrahim Amichla82% (28)
- TP Mds N02 PDFDocument4 pagesTP Mds N02 PDFLeghrieb RaidPas encore d'évaluation
- Formulation Des BetonsDocument7 pagesFormulation Des BetonsAnouar MatiPas encore d'évaluation
- CH14Document6 pagesCH14AFAFPas encore d'évaluation
- Cours Transfert-ThermiqueDocument78 pagesCours Transfert-ThermiqueDounia AniPas encore d'évaluation
- Devoir de Synthèse N°1 - Sciences Physiques - Bac Informatique (2012-2013) MR Abdmouleh NabilDocument6 pagesDevoir de Synthèse N°1 - Sciences Physiques - Bac Informatique (2012-2013) MR Abdmouleh NabilMrDOMOPas encore d'évaluation
- Chap 6 OXYDO REDUCTIONDocument11 pagesChap 6 OXYDO REDUCTIONMoustapha SallPas encore d'évaluation
- Faculte Des Hydrocarbures Et de La Chimie Transfert de Chaleur Boumerdes - InhDocument8 pagesFaculte Des Hydrocarbures Et de La Chimie Transfert de Chaleur Boumerdes - InhNasro DjePas encore d'évaluation
- 2005 AmSud Sujet Exo3 Cinetique Sapo 6 5ptsDocument3 pages2005 AmSud Sujet Exo3 Cinetique Sapo 6 5ptskhamis faridPas encore d'évaluation
- Support Cours Khodja PDFDocument77 pagesSupport Cours Khodja PDFEmmad Abdelkarim100% (1)
- CNC Corrige 2000 2008Document339 pagesCNC Corrige 2000 2008Ouma imaPas encore d'évaluation
- LP203 2013 01 16 Exam SujetDocument3 pagesLP203 2013 01 16 Exam SujetHamri SabrinePas encore d'évaluation
- CCNDL 1ere C Maths 2011 2012 Composition de Fin Du 1er TrimDocument2 pagesCCNDL 1ere C Maths 2011 2012 Composition de Fin Du 1er Trimfreyter freyter417Pas encore d'évaluation
- Etude Du PortiqueDocument10 pagesEtude Du Portiquelando de chance100% (1)
- Physiques 1ère Sequence PD-WPS OfficeDocument4 pagesPhysiques 1ère Sequence PD-WPS OfficeBiri OusmanouPas encore d'évaluation
- Diffusion Des Faisceaux Laser Par Des ParticulesDocument17 pagesDiffusion Des Faisceaux Laser Par Des ParticuleshajjiPas encore d'évaluation
- 1 Analyse VibratoireDocument11 pages1 Analyse VibratoireAnonymous LfeGI2hM50% (2)
- Cour FDTD - 102518Document38 pagesCour FDTD - 102518EL MESSAOUDI MariemPas encore d'évaluation
- Memento FormulaireDocument26 pagesMemento FormulaireMaria AlielhadjiabdouPas encore d'évaluation
- Les Treillis 2Document21 pagesLes Treillis 2Gérard Claude EssomePas encore d'évaluation
- Landau, Lifchitz - Physique Théorique Vol 07 - Théorie de L'élasticité - Mir - 1967Document207 pagesLandau, Lifchitz - Physique Théorique Vol 07 - Théorie de L'élasticité - Mir - 1967Hicham Yang100% (1)
- Tuyere de LavalDocument4 pagesTuyere de LavalSilvia JaimesPas encore d'évaluation
- Séance Exercice Résistance ÉlectriquesDocument2 pagesSéance Exercice Résistance ÉlectriquesBenhabi SelmenPas encore d'évaluation
- Chapitre 1 Distribution Et Transport D'énergie ÉlectriqueDocument40 pagesChapitre 1 Distribution Et Transport D'énergie Électriquezazar100% (1)
- Controle 1 - 2 S1 PC 1bac FRDocument2 pagesControle 1 - 2 S1 PC 1bac FRElmahdi BenhPas encore d'évaluation
- SRPS en 12390-7 (2008)Document16 pagesSRPS en 12390-7 (2008)Boško JanjuševićPas encore d'évaluation
- Concours Ensa 2013 Physique Chimie EpreuveDocument4 pagesConcours Ensa 2013 Physique Chimie EpreuveAdil NomadPas encore d'évaluation
- Partie: Physique Mouvement Plan Exercice N°1: JEU DU BOULETDocument25 pagesPartie: Physique Mouvement Plan Exercice N°1: JEU DU BOULETtamersamira80Pas encore d'évaluation
- Activ 1-2 - Interaction Lumière Matière - ADocument3 pagesActiv 1-2 - Interaction Lumière Matière - AguillaumeboblozePas encore d'évaluation
- Pendule de FoucaultDocument12 pagesPendule de FoucaultMichel LL.Pas encore d'évaluation
- Modelisation PDFDocument10 pagesModelisation PDFAppia CekaPas encore d'évaluation
- La GéophysiqueDocument29 pagesLa GéophysiquetinaPas encore d'évaluation
- Cours MQDocument228 pagesCours MQsousouelbrouziPas encore d'évaluation