Vous aimerez peut-être aussi
- Modélisation Des SystèmesDocument7 pagesModélisation Des Systèmestenere comPas encore d'évaluation
- Chapitre 1 - Systèmes AsservisDocument10 pagesChapitre 1 - Systèmes AsservisSif eddinePas encore d'évaluation
- SLCI ModelisationDocument6 pagesSLCI ModelisationMurat BasPas encore d'évaluation
- CHAPitre AsservissementDocument7 pagesCHAPitre AsservissementMht zene hassanePas encore d'évaluation
- Chap 4 Analyses Temporelles Et Frequentielles Des Système FondamentauxDocument15 pagesChap 4 Analyses Temporelles Et Frequentielles Des Système FondamentauxKoum SouloumPas encore d'évaluation
- Chapitre II Réponse TemporellesDocument5 pagesChapitre II Réponse TemporellesAbdelrahman B Abu Amro0% (1)
- Transf Laplace FN TransfertDocument33 pagesTransf Laplace FN TransfertAicha B'mhPas encore d'évaluation
- Cours Auto Chapitre 2Document4 pagesCours Auto Chapitre 2Nabil TAALLAHPas encore d'évaluation
- M-Energetique Asservissement Et Regulation-Chapitre 1 Et 2Document59 pagesM-Energetique Asservissement Et Regulation-Chapitre 1 Et 2CHEMS EDDINEPas encore d'évaluation
- Cours Auto Chapitre 1Document4 pagesCours Auto Chapitre 1Nabil TAALLAHPas encore d'évaluation
- Partie IIDocument52 pagesPartie IItarrieuPas encore d'évaluation
- Chapitre 2:: Modélisation Et Identification Des Systèmes en Boucle Ouverte Et FerméeDocument104 pagesChapitre 2:: Modélisation Et Identification Des Systèmes en Boucle Ouverte Et Ferméekaoutaramr8Pas encore d'évaluation
- TD AsservtDocument4 pagesTD AsservtLiam SportPas encore d'évaluation
- CHAP 3 Régulation IndustrielleDocument15 pagesCHAP 3 Régulation IndustrielleNidal BestPas encore d'évaluation
- Chapitre 2-Transformée de Laplace Et Representation Des SystèmesDocument11 pagesChapitre 2-Transformée de Laplace Et Representation Des SystèmesIbtissem DERRARPas encore d'évaluation
- TP1 - Etude Et Programmation Des Systèmes Continus - 2GMDocument7 pagesTP1 - Etude Et Programmation Des Systèmes Continus - 2GMahaweni004Pas encore d'évaluation
- CoursAutomatique Machi D OstadeDocument154 pagesCoursAutomatique Machi D Ostadedriss chakdaliPas encore d'évaluation
- Auto CttransfertDocument15 pagesAuto CttransfertMaher Chi ChibaniPas encore d'évaluation
- Asservissement Régulation FC C2Document23 pagesAsservissement Régulation FC C2Guency Alven Rhocky KOMBILAPas encore d'évaluation
- TP 1 RégulationDocument7 pagesTP 1 RégulationNa Dir SayahPas encore d'évaluation
- Modélisation Des SystèmesDocument11 pagesModélisation Des SystèmesA.BenhariPas encore d'évaluation
- Chap I 2Document18 pagesChap I 2Ranim JouiniPas encore d'évaluation
- Chapitre 2 Modélisation Des SystèmesDocument12 pagesChapitre 2 Modélisation Des SystèmesAyoub MhdPas encore d'évaluation
- SystèmeDocument53 pagesSystèmeMuhammed ChenafiPas encore d'évaluation
- TD N°2 DUT Signaux Et Système, Laplace 2023 - 2024Document2 pagesTD N°2 DUT Signaux Et Système, Laplace 2023 - 2024Younouss KEITAPas encore d'évaluation
- 2-Résolution Des Équation D'étatDocument8 pages2-Résolution Des Équation D'étatSami FedererPas encore d'évaluation
- TP De1à19Document204 pagesTP De1à19zora samaPas encore d'évaluation
- TP01 RégulationDocument10 pagesTP01 RégulationAhmed BoualiPas encore d'évaluation
- Régulation Tp1Document9 pagesRégulation Tp1Ahmed BoualiPas encore d'évaluation
- TP Electronique Sur MAtlabDocument152 pagesTP Electronique Sur MAtlabnouredine akli100% (1)
- TD2 Réponses Des Systèmes LinéairesDocument2 pagesTD2 Réponses Des Systèmes LinéairesYasser YasserPas encore d'évaluation
- Cours S7 EtatDocument70 pagesCours S7 EtatMoundherNasmlahePas encore d'évaluation
- TP 1 Asservissement Et RégulationDocument9 pagesTP 1 Asservissement Et Régulationhoussemouazaa2003Pas encore d'évaluation
- Chapitre 2-Transformée de Laplace Et Representation Des SystèmesDocument11 pagesChapitre 2-Transformée de Laplace Et Representation Des Systèmesamina HasnaouiPas encore d'évaluation
- TP1 AutomatiqueDocument14 pagesTP1 AutomatiqueM'tıraouı BadrPas encore d'évaluation
- Cours Aut Prep 2022Document66 pagesCours Aut Prep 2022missawiiyassinPas encore d'évaluation
- Cours de Systemes AsservisDocument82 pagesCours de Systemes Asserviselectroblida86% (7)
- TD Système Ordre 1 PDFDocument5 pagesTD Système Ordre 1 PDFJribi TalelPas encore d'évaluation
- Cours de Digital Control SystemsDocument172 pagesCours de Digital Control SystemsarcPas encore d'évaluation
- CoursDocument39 pagesCoursOualidscribdPas encore d'évaluation
- LesBasesMathematiquesdelAutomatique PDFDocument211 pagesLesBasesMathematiquesdelAutomatique PDFZied HazemPas encore d'évaluation
- Chapitre 4 Filtrage Analogique - AnalyseDocument47 pagesChapitre 4 Filtrage Analogique - AnalyseZineb ElgourainPas encore d'évaluation
- Cours Autom 2022 2023Document71 pagesCours Autom 2022 2023RABAB MASDOURPas encore d'évaluation
- Modélisation SystèmesDocument7 pagesModélisation Systèmeslouizini abderahmanePas encore d'évaluation
- TP 3: Analyse Temporelle Et Frequentielle Des Systemes LineairesDocument4 pagesTP 3: Analyse Temporelle Et Frequentielle Des Systemes Lineairesbouzida ilyesPas encore d'évaluation
- Théorie de La ConvolutionDocument15 pagesThéorie de La ConvolutionRenaît Des cendresPas encore d'évaluation
- Exercices - Asservissement A ChercherDocument13 pagesExercices - Asservissement A ChercherLaurenne YaoPas encore d'évaluation
- Chapitre 1 ASC 22Document35 pagesChapitre 1 ASC 22Aymen BhdPas encore d'évaluation
- Exercices d'intégrales et d'équations intégro-différentiellesD'EverandExercices d'intégrales et d'équations intégro-différentiellesPas encore d'évaluation
- Équations différentielles: Les Grands Articles d'UniversalisD'EverandÉquations différentielles: Les Grands Articles d'UniversalisPas encore d'évaluation
- Exercices d'intégrales de lignes, de surfaces et de volumesD'EverandExercices d'intégrales de lignes, de surfaces et de volumesPas encore d'évaluation
- Rapport de Stage Mansour Avec CorrectionDocument29 pagesRapport de Stage Mansour Avec CorrectionMansour AboubacarPas encore d'évaluation
- Memoire ASNI 1Document63 pagesMemoire ASNI 1Mansour AboubacarPas encore d'évaluation
- Telecom MobleDocument39 pagesTelecom MobleMansour AboubacarPas encore d'évaluation
- Thèse Satellites (2) WORDDocument56 pagesThèse Satellites (2) WORDMansour AboubacarPas encore d'évaluation
- Plan de Cours - KORICHI MaaroufDocument8 pagesPlan de Cours - KORICHI MaaroufBenyoucef AmelPas encore d'évaluation
- Copie de Introduction IlyesDocument3 pagesCopie de Introduction Ilyesabed mrzPas encore d'évaluation
- Formulation Faible - Wikipédia PDFDocument11 pagesFormulation Faible - Wikipédia PDFvictorienPas encore d'évaluation
- MP PHYSIQUE MINES 2 2007.enonceDocument6 pagesMP PHYSIQUE MINES 2 2007.enonceAnass TakfaPas encore d'évaluation
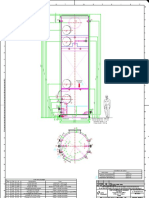
- Plan de Détail Du Stripeur SRV 2200 - 3M en PPH/SVR + Calorifuge + Enveloppe en SVRDocument1 pagePlan de Détail Du Stripeur SRV 2200 - 3M en PPH/SVR + Calorifuge + Enveloppe en SVRBen Abdallah BecemPas encore d'évaluation
- Hourdis de PontsDocument34 pagesHourdis de Pontskhengui100% (1)
- tp2 CapteursDocument1 pagetp2 CapteursMohamed MtsPas encore d'évaluation
- Cours Système Dynamiques ECM 2021Document31 pagesCours Système Dynamiques ECM 2021Bassma Ak-hiriPas encore d'évaluation
- Chapitre2 Résistance Des Matériaux 1Document3 pagesChapitre2 Résistance Des Matériaux 1YattePas encore d'évaluation
- Serie N2 5D PC L Koubeni 2021-2022 EhmeityDocument1 pageSerie N2 5D PC L Koubeni 2021-2022 EhmeityEl Hassen Med MoustaphaPas encore d'évaluation
- Couples de Forces - CopieDocument28 pagesCouples de Forces - CopiefontainePas encore d'évaluation
- These JCQDocument159 pagesThese JCQMed larbi MustaphaPas encore d'évaluation
- MVT Plan Doc ProfDocument6 pagesMVT Plan Doc ProfLaurent Bertrand OtabelaPas encore d'évaluation
- Eva 1 Phy 1ère D PetouDocument2 pagesEva 1 Phy 1ère D PetouTAKOUO LEDOUXPas encore d'évaluation
- 2022 MP Rapport Ecrit Maths B (X)Document7 pages2022 MP Rapport Ecrit Maths B (X)Yassin MoakherPas encore d'évaluation
- Ipe 80Document2 pagesIpe 80Hosni MdiniPas encore d'évaluation
- Math CDocument5 pagesMath CiyadhPas encore d'évaluation
- La Culture Sous SerreDocument6 pagesLa Culture Sous SerreRabai NoureddinePas encore d'évaluation
- Similitudes 4ème Mathématiques 1Document9 pagesSimilitudes 4ème Mathématiques 1Mohammed GharabPas encore d'évaluation
- Chapitre 3 - Choix de MatériauxDocument40 pagesChapitre 3 - Choix de MatériauxRobin BrossardPas encore d'évaluation
- GuideTechnique LCPC GTPORTANCE PDFDocument28 pagesGuideTechnique LCPC GTPORTANCE PDFMohamed Amine Zemouri100% (1)
- Fiche Exercices Jour Semaine Mois CP OyM0f84GDocument2 pagesFiche Exercices Jour Semaine Mois CP OyM0f84GGuyPas encore d'évaluation
- RA20 Lycee GT Ter Philo Simondon 1294346Document17 pagesRA20 Lycee GT Ter Philo Simondon 1294346Isabelle PiconPas encore d'évaluation
- Chapitre 2 OptiqueDocument20 pagesChapitre 2 OptiquekarimPas encore d'évaluation
- B Oscillateurs Et OndesDocument33 pagesB Oscillateurs Et OndesjPas encore d'évaluation
- Decharge de CouronneDocument7 pagesDecharge de CouronneOussama Mohammad Messadi100% (1)
- Module Commun - Electricité de Base Et ÉlectroniqueDocument49 pagesModule Commun - Electricité de Base Et ÉlectroniqueWahab jtPas encore d'évaluation
- Etude Du Comportement Des Engrenages.Document100 pagesEtude Du Comportement Des Engrenages.dermouchirachid91Pas encore d'évaluation
- Corrigé de L'épreuve Du 27 JuinDocument2 pagesCorrigé de L'épreuve Du 27 JuinAime Christian N'drinPas encore d'évaluation
- Ciem 4Document56 pagesCiem 4NDALAPas encore d'évaluation