Vous aimerez peut-être aussi
- Les Engrenages Cours BacDocument6 pagesLes Engrenages Cours Bacchaouch.najehPas encore d'évaluation
- TP 2Document4 pagesTP 2Achraf MajdoubPas encore d'évaluation
- Séquentiel - ENSA - Synthese Asynchrone HuffmanDocument40 pagesSéquentiel - ENSA - Synthese Asynchrone HuffmanAicha LahnoukiPas encore d'évaluation
- TP 2 GMDVDocument6 pagesTP 2 GMDVmewguv Ahmed salekPas encore d'évaluation
- TP Dut-Etk2 2016Document6 pagesTP Dut-Etk2 2016ibrazizi2000Pas encore d'évaluation
- Chap. 2 - Stabilité PDFDocument28 pagesChap. 2 - Stabilité PDFHamza AinasPas encore d'évaluation
- Chapitre 2Document16 pagesChapitre 2Salmi AbdelkaderPas encore d'évaluation
- Devoir+de+Synthèse+N1 2AS 2021 SertisseuseDocument5 pagesDevoir+de+Synthèse+N1 2AS 2021 SertisseuseGuiliassPas encore d'évaluation
- Chap-4 - Automatique Et CommandeDocument34 pagesChap-4 - Automatique Et CommandeSalah FdPas encore d'évaluation
- TD Synthc3a8seDocument7 pagesTD Synthc3a8sejawahermohamed.maPas encore d'évaluation
- 3-Performances Des Systèmes Linéaires ÉchantillonnésDocument4 pages3-Performances Des Systèmes Linéaires ÉchantillonnésLahdheri ChadiPas encore d'évaluation
- TP4 Système Asservis OctaveDocument4 pagesTP4 Système Asservis Octavebenaissa maherPas encore d'évaluation
- EXAMEN - Janvier 2021 - Éléments de Machines - LGM2Document6 pagesEXAMEN - Janvier 2021 - Éléments de Machines - LGM2Khaled GammoudiPas encore d'évaluation
- Corrigé TD1 TRSF de MVTDocument5 pagesCorrigé TD1 TRSF de MVTأشرف عبودPas encore d'évaluation
- FlogiqueDocument9 pagesFlogiqueSamir abidiPas encore d'évaluation
- Automatisme Sequentiel V4Document17 pagesAutomatisme Sequentiel V4Khaled OuniPas encore d'évaluation
- td1 Et 2Document14 pagestd1 Et 2fatima zahra benmeriemePas encore d'évaluation
- SYNTHESE DES SYSTEMES SEQUENTIELS Doc ElevDocument11 pagesSYNTHESE DES SYSTEMES SEQUENTIELS Doc ElevNejib JallouliPas encore d'évaluation
- TD N°5Document8 pagesTD N°5NotnowPas encore d'évaluation
- Devoir de Synthese N1 1AS 2022 Étau de PerceuseDocument5 pagesDevoir de Synthese N1 1AS 2022 Étau de PerceuseZied BaccarPas encore d'évaluation
- Espace Etat CommandeDocument35 pagesEspace Etat CommandeSeddik MehenniPas encore d'évaluation
- Chapitr 1Document12 pagesChapitr 1Salmi AbdelkaderPas encore d'évaluation
- Chap6 Sof Stabilité ITDocument46 pagesChap6 Sof Stabilité ITAhmed Ben MakhloufPas encore d'évaluation
- Automatique, Informatique Et Informatique Industielle0001Document16 pagesAutomatique, Informatique Et Informatique Industielle0001Ilyass Hani100% (1)
- TD SUPPORT eDocument5 pagesTD SUPPORT emasteratsiiPas encore d'évaluation
- Chap-10.EX02 SujDocument5 pagesChap-10.EX02 SujLouis PouchepadassPas encore d'évaluation
- Chap3 Com Ada07Document54 pagesChap3 Com Ada07medPas encore d'évaluation
- A3 1 Les BasculesDocument8 pagesA3 1 Les BasculesAymen ladhariPas encore d'évaluation
- Chapitre6 Numérisation D'un Régulateur AnalogiqueDocument7 pagesChapitre6 Numérisation D'un Régulateur AnalogiqueAYOUB RIADPas encore d'évaluation
- TP Serre JointDocument5 pagesTP Serre JointrivierePas encore d'évaluation
- Cours CompletDocument182 pagesCours CompletsaadPas encore d'évaluation
- Les BasculesDocument5 pagesLes Basculesحنيش يوسف100% (1)
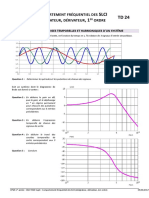
- CI10 TD24 Sujet - Comportement Fréquentiel Des SLCI (Intégrateur, Dérivateur, 1er Ordre)Document4 pagesCI10 TD24 Sujet - Comportement Fréquentiel Des SLCI (Intégrateur, Dérivateur, 1er Ordre)Khaled JberiPas encore d'évaluation
- A4 Oscillations Libres Et ForceesDocument7 pagesA4 Oscillations Libres Et ForceesFatiha BoudjemaPas encore d'évaluation
- TD - Devoir Observateur D'état Pour Un Processus de Traitement de Minerais (34707) PDFDocument3 pagesTD - Devoir Observateur D'état Pour Un Processus de Traitement de Minerais (34707) PDFEl GhafraouiPas encore d'évaluation
- Chap Ii - Isostatisme - 2023 PDFDocument13 pagesChap Ii - Isostatisme - 2023 PDFDelano TamkoPas encore d'évaluation
- TP-3 Etude Et Application Des BasculesDocument9 pagesTP-3 Etude Et Application Des Basculesessadsofia8Pas encore d'évaluation
- CH 24Document17 pagesCH 24Jassir AmgroudPas encore d'évaluation
- ch5 CircuitssequentielsDocument84 pagesch5 CircuitssequentielsMinaBassamPas encore d'évaluation
- Automatic Seance2 2022-2023Document34 pagesAutomatic Seance2 2022-2023KJ j jxidvdPas encore d'évaluation
- M1-Schematisation DiapoDocument26 pagesM1-Schematisation Diapolilas.cfavierPas encore d'évaluation
- EvaluationDocument5 pagesEvaluationBucky's DollPas encore d'évaluation
- TH4 1 EvalDocument5 pagesTH4 1 EvalMehdi BouchamiPas encore d'évaluation
- Cin CoursDocument54 pagesCin CoursdesiréPas encore d'évaluation
- Analysefrequentielle MPDocument42 pagesAnalysefrequentielle MPHamid BassourPas encore d'évaluation
- Final1 Reg 2014 2015Document9 pagesFinal1 Reg 2014 2015Zak BelPas encore d'évaluation
- Cours 5Document28 pagesCours 5Mohammed El azhariPas encore d'évaluation
- Bosch BoschDocument25 pagesBosch BoschSileye SosPas encore d'évaluation
- TD3 - AutomatiqueDocument1 pageTD3 - AutomatiqueSalah Eddine EL AbbadiPas encore d'évaluation
- CNC Si MP 2011Document27 pagesCNC Si MP 2011salma ait aliPas encore d'évaluation
- Chapitre IV-Stabilité Et Précision Des Systèmes Linéaires Asservis Critère de Routh PDFDocument5 pagesChapitre IV-Stabilité Et Précision Des Systèmes Linéaires Asservis Critère de Routh PDFHouimli AbdlazizPas encore d'évaluation
- Analyse Des PerfomarmancesDocument6 pagesAnalyse Des PerfomarmancesFiras AguirPas encore d'évaluation
- Devoirdesynthesen3 1as 2006 2007 Cle de Plombier PDFDocument5 pagesDevoirdesynthesen3 1as 2006 2007 Cle de Plombier PDFMohamed B'nPas encore d'évaluation
- Dessin D'ensembleDocument9 pagesDessin D'ensembleBouabdellaoui saif ennasr100% (1)
- Cotation Fonct 4stDocument6 pagesCotation Fonct 4stRahma BaccarPas encore d'évaluation
- Cours Automatique Séance5 2023 2024Document19 pagesCours Automatique Séance5 2023 2024AMJADPas encore d'évaluation
- Tp1 Systemes Echantillonnes Matlab SimulinkDocument8 pagesTp1 Systemes Echantillonnes Matlab Simulinkdan0% (1)
- LEEA - L2 - TP LogiqueDocument10 pagesLEEA - L2 - TP LogiqueMH BkrPas encore d'évaluation
- Chap5 Syst SequentielDocument16 pagesChap5 Syst SequentielAicha LahnoukiPas encore d'évaluation
- TP Ci3Document3 pagesTP Ci3Aicha Lahnouki50% (2)
- Seìquentiel 1Document100 pagesSeìquentiel 1Aicha LahnoukiPas encore d'évaluation
- 3 Logique Combinatoire v2Document89 pages3 Logique Combinatoire v2Aicha LahnoukiPas encore d'évaluation
- Chapitre 9 Les Édifices Chimiques CondensésDocument4 pagesChapitre 9 Les Édifices Chimiques Condensésjean06Pas encore d'évaluation
- Lanista RPGDocument32 pagesLanista RPGWanda Von DunajevvPas encore d'évaluation
- Négociation CommercialeDocument7 pagesNégociation Commercialeoussama ouhababPas encore d'évaluation
- Le Livre Du Salut GoétiqueDocument61 pagesLe Livre Du Salut Goétiquemonczka patrick100% (1)
- 20220212000935Document255 pages20220212000935Said BabaciPas encore d'évaluation
- 3 Les Modèles Systémiques de La Pensée CommunicationnelleDocument3 pages3 Les Modèles Systémiques de La Pensée CommunicationnelleIbrahim Bekkali100% (1)
- 2 Asepsie Et AntisepsieDocument10 pages2 Asepsie Et AntisepsieChristian NgalaPas encore d'évaluation
- CV HoudaDocument1 pageCV HoudamessaoudiPas encore d'évaluation
- Mésologiques - La Chôra Chez Platon - Augustin BerqueDocument6 pagesMésologiques - La Chôra Chez Platon - Augustin BerquemaxiPas encore d'évaluation
- Catalogue ChaussuresDocument62 pagesCatalogue ChaussuresSERATPas encore d'évaluation
- Etat Des Unités IndustriellesDocument7 pagesEtat Des Unités Industrielleshama abdoulaye diallo aboubacar100% (2)
- Montres À QuartzDocument60 pagesMontres À QuartzMikeNovember100% (1)
- CV Anouari - FluidesDocument2 pagesCV Anouari - FluidesAbdou AbdouuPas encore d'évaluation
- Thèse À ImprimerDocument154 pagesThèse À ImprimerEL Hassania EL HERRADIPas encore d'évaluation
- 5.3 Correction Des Systèmes AsservisDocument21 pages5.3 Correction Des Systèmes AsservisKeubeng CriyosPas encore d'évaluation
- Catalogue Picasso CafeDocument26 pagesCatalogue Picasso CafeAbderrahmane EssaouriPas encore d'évaluation
- Centrale Tsi2019pc2e 1Document6 pagesCentrale Tsi2019pc2e 1سامي لمرابط Sami MrabetPas encore d'évaluation
- Wittfogel Le Despotisme OrientalDocument712 pagesWittfogel Le Despotisme Orientalzaadig100% (1)
- Organigramme-2Document3 pagesOrganigramme-2Abdel Motaleb AL-SaadyPas encore d'évaluation
- ds1 CinDocument3 pagesds1 Cinmohamed laghribPas encore d'évaluation
- Taxes D'effet Équivalant À Des Droits de Douane 2006Document15 pagesTaxes D'effet Équivalant À Des Droits de Douane 2006berniverPas encore d'évaluation
- EFM Maintenance D'un Réseau - Variante 1 - CorrectionDocument3 pagesEFM Maintenance D'un Réseau - Variante 1 - CorrectionbaybaysalahPas encore d'évaluation
- Espace CIBTP Document 2Document2 pagesEspace CIBTP Document 2Bogdan BogdanovicPas encore d'évaluation
- Questionnaire D'enqueteDocument2 pagesQuestionnaire D'enqueteCarion Gaïus Mahuto DOSSAPas encore d'évaluation
- Gabion ÉlectrosoudésDocument1 pageGabion ÉlectrosoudésLouis JacquesPas encore d'évaluation
- Droit Des Sociétés 1Document152 pagesDroit Des Sociétés 1David GNAGOPas encore d'évaluation
- Merise 1 Csi Ida1Document65 pagesMerise 1 Csi Ida1maurian seuPas encore d'évaluation
- Cours de Biophysique Eqiulibre de Donnan Phénomènes de SurfaceDocument5 pagesCours de Biophysique Eqiulibre de Donnan Phénomènes de SurfaceSmail AazzaPas encore d'évaluation
- Cahier de Charge AEPDocument60 pagesCahier de Charge AEPRKAM MellecemPas encore d'évaluation
- موضوع اختبار الفصل الثالث -اللغة الفرنسية -الأولى ثانوي آداب وفلسفة-2Document2 pagesموضوع اختبار الفصل الثالث -اللغة الفرنسية -الأولى ثانوي آداب وفلسفة-2azoug.karim01Pas encore d'évaluation