Vous aimerez peut-être aussi
- 15 Depart MoteurDocument36 pages15 Depart MoteurWildaba BabouchaPas encore d'évaluation
- Armes À Silex - COC - Volume 3Document12 pagesArmes À Silex - COC - Volume 3scriiiptPas encore d'évaluation
- TD2 Gemma PDFDocument3 pagesTD2 Gemma PDFyousef ouasfia100% (1)
- SCHEMA ELECTRIQUE 4eme ADocument80 pagesSCHEMA ELECTRIQUE 4eme ANtepp Jean Bosco De La Grâce88% (8)
- Capteur de PhaseDocument8 pagesCapteur de PhaseKhiereddine RahimPas encore d'évaluation
- Demarrage MASDocument15 pagesDemarrage MASMohamed OuiddadPas encore d'évaluation
- Epreuve Dessin TechnoDocument6 pagesEpreuve Dessin TechnoLeo NkepseuPas encore d'évaluation
- Travaux Diriges de Schema Automatism1Document2 pagesTravaux Diriges de Schema Automatism1josias zinsouPas encore d'évaluation
- Devoir de Synthèse Appareillage 2020-2021Document7 pagesDevoir de Synthèse Appareillage 2020-2021Heni DaoudPas encore d'évaluation
- Correction TD 3 Schéma CinématiqueDocument7 pagesCorrection TD 3 Schéma CinématiqueShooting StarPas encore d'évaluation
- TD GrafcetDocument6 pagesTD GrafcetJovy Berny100% (1)
- CR #4 Electrotechnique 3AIELDocument2 pagesCR #4 Electrotechnique 3AIELjosias zinsou100% (1)
- Etude de La Commande PerceuseDocument5 pagesEtude de La Commande PerceuseJUK SPELPas encore d'évaluation
- Dessin TectnoDocument3 pagesDessin TectnoESSOME ESSOME OLIVIER STEPHANEPas encore d'évaluation
- TP2 automatismeLAIIDocument6 pagesTP2 automatismeLAIIfakhri menjliPas encore d'évaluation
- Devoir Du 2ème Trimestre 2022Document5 pagesDevoir Du 2ème Trimestre 2022josias zinsou100% (1)
- Est Tle EL 2Document3 pagesEst Tle EL 2josias zinsouPas encore d'évaluation
- Cahiers de ChargesDocument23 pagesCahiers de Chargesعدنان عدنان أسامة100% (2)
- BTS Schéma-AutoDocument3 pagesBTS Schéma-Autondiayemalick1008Pas encore d'évaluation
- Sujets Exam AutoDocument3 pagesSujets Exam AutoFth WalterPas encore d'évaluation
- TPETIDocument10 pagesTPETISam DikoPas encore d'évaluation
- Bts Blanc 2elt Ese s1 2023bDocument14 pagesBts Blanc 2elt Ese s1 2023bAbi ClémentPas encore d'évaluation
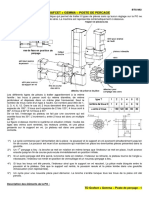
- 12-TD G7 + GEMMA Poste de PerçageDocument3 pages12-TD G7 + GEMMA Poste de PerçageursulaahoulahouPas encore d'évaluation
- Auto - 1 - 2023 OkDocument8 pagesAuto - 1 - 2023 OkfjosephfabricePas encore d'évaluation
- 2D1S TleF3 ESTDocument2 pages2D1S TleF3 ESTjosias zinsouPas encore d'évaluation
- Devoir de Synthèse N°3 2015 2016 (MR Hadjkacem Abdelkarim)Document8 pagesDevoir de Synthèse N°3 2015 2016 (MR Hadjkacem Abdelkarim)ba WajihPas encore d'évaluation
- TP N°10 - Moteurs, Relais Et Transistors Sous ProteusDocument14 pagesTP N°10 - Moteurs, Relais Et Transistors Sous ProteusBabacar SOWPas encore d'évaluation
- TD1 Automatisme - GRAFCETDocument11 pagesTD1 Automatisme - GRAFCETFadila FE100% (2)
- MTS 443Document16 pagesMTS 443Jlassi TarekPas encore d'évaluation
- Cours de Commande Des Machines 1 Bon 2Document129 pagesCours de Commande Des Machines 1 Bon 2stephaneateufack98Pas encore d'évaluation
- Poste Automatique de Séchage Et D'évacuation: RoyaumeDocument53 pagesPoste Automatique de Séchage Et D'évacuation: RoyaumeAbdelhakimPas encore d'évaluation
- 08a Etoile Triangle EleveDocument6 pages08a Etoile Triangle ElevedayangPas encore d'évaluation
- Chap8 Aut Log Vol3 v2Document19 pagesChap8 Aut Log Vol3 v2Phoe NixPas encore d'évaluation
- 01 - Systeme de Lavage Automatique de Vehicules - (DT)Document5 pages01 - Systeme de Lavage Automatique de Vehicules - (DT)salem jomaaPas encore d'évaluation
- TD1 BvaDocument5 pagesTD1 BvamohamedPas encore d'évaluation
- TP Auto PercageDocument21 pagesTP Auto PercagekaoutarPas encore d'évaluation
- t2 SCH Inf2007Document4 pagest2 SCH Inf2007Moustapha HanePas encore d'évaluation
- DC3 15Document4 pagesDC3 15Nejib JallouliPas encore d'évaluation
- DS3 - 2015 - 2016 FinaleDocument9 pagesDS3 - 2015 - 2016 FinaleRidha ManaaPas encore d'évaluation
- EEIN Examen FinalDocument5 pagesEEIN Examen FinalIbrahim BahloulPas encore d'évaluation
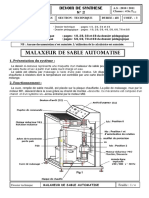
- Devoir de Synthèse N°2 - Technologie Dossier Technique MALAXEUR DE SABLE - Bac Technique (2010-2011) MR ZAAFOURI mEHREZDocument4 pagesDevoir de Synthèse N°2 - Technologie Dossier Technique MALAXEUR DE SABLE - Bac Technique (2010-2011) MR ZAAFOURI mEHREZsuiton fzPas encore d'évaluation
- TPensachageDocument2 pagesTPensachageNicola Aborjayle100% (1)
- Eff Emi 2012 THDocument6 pagesEff Emi 2012 THInteg StiPas encore d'évaluation
- Malaxeur de Sable AutomatiseDocument9 pagesMalaxeur de Sable AutomatiseHamada HamadaPas encore d'évaluation
- Polycopie TP GE 2023Document51 pagesPolycopie TP GE 2023mariam.ouaaabedPas encore d'évaluation
- DS34STDocument7 pagesDS34STZaraki RiodaPas encore d'évaluation
- Etoile TriangleDocument6 pagesEtoile Triangleoussama kherbouchePas encore d'évaluation
- dc2 NRDocument6 pagesdc2 NRrayenk690Pas encore d'évaluation
- Tte 95 Ce 1Document4 pagesTte 95 Ce 1l mPas encore d'évaluation
- Tte95ce1 PDFDocument4 pagesTte95ce1 PDFphoto videoPas encore d'évaluation
- TD Mise en Oeuvre Demarrage POMPEDocument8 pagesTD Mise en Oeuvre Demarrage POMPEsebPas encore d'évaluation
- Moteur Pas - À-Pas Chapitre 2Document7 pagesMoteur Pas - À-Pas Chapitre 2Adel Haddad HauntedPas encore d'évaluation
- S1 Circuit CD Cablés Sécurités 15-11-2017Document22 pagesS1 Circuit CD Cablés Sécurités 15-11-2017poste.sourceassilahPas encore d'évaluation
- TanatimigodagabDocument2 pagesTanatimigodagabchelsa tiotsopPas encore d'évaluation
- SequenceurDocument7 pagesSequenceurAgence NouvellePas encore d'évaluation
- DT DC3 FinaleDocument6 pagesDT DC3 FinaleChaabane BOUALIPas encore d'évaluation
- 08a Etoile TriangleDocument6 pages08a Etoile TriangleA.Houssain100% (1)
- Bts 2019 Elect de Puissance Asservissement Inf IndustDocument5 pagesBts 2019 Elect de Puissance Asservissement Inf IndustOk OkokPas encore d'évaluation
- t2 Electro2015Document4 pagest2 Electro2015Yahya AidaraPas encore d'évaluation
- Le syndrome périodique associé à la cryopyrine (CAPS)D'EverandLe syndrome périodique associé à la cryopyrine (CAPS)Pas encore d'évaluation
- CN1 T3Document2 pagesCN1 T3josias zinsouPas encore d'évaluation
- Groupe 8Document2 pagesGroupe 8josias zinsouPas encore d'évaluation
- Epreuve Constr Meca T1 1er GR 2023Document6 pagesEpreuve Constr Meca T1 1er GR 2023josias zinsouPas encore d'évaluation
- Epreuve Electrotech t2 1er GR 2023Document3 pagesEpreuve Electrotech t2 1er GR 2023josias zinsouPas encore d'évaluation
- Force Et ChampDocument4 pagesForce Et Champjosias zinsouPas encore d'évaluation
- Série D'exercices N°1 - Physique - Loi de Coulomb Champ Électrique - 3ème Informatique (2017-2018) MR Hedfi KhemaisDocument3 pagesSérie D'exercices N°1 - Physique - Loi de Coulomb Champ Électrique - 3ème Informatique (2017-2018) MR Hedfi Khemaisjosias zinsouPas encore d'évaluation
- Groupe 5Document1 pageGroupe 5josias zinsou100% (1)
- Epreuve Delectricite T1 1er GR 2023Document1 pageEpreuve Delectricite T1 1er GR 2023josias zinsouPas encore d'évaluation
- Groupe 7Document2 pagesGroupe 7josias zinsouPas encore d'évaluation
- Electricite GeneraleDocument32 pagesElectricite Generalejosias zinsouPas encore d'évaluation
- 2ème Contrôle Du 2ème TrimestreDocument1 page2ème Contrôle Du 2ème Trimestrejosias zinsouPas encore d'évaluation
- TD ElectroDocument4 pagesTD Electrojosias zinsouPas encore d'évaluation
- Exercice Ts 1ère f3Document6 pagesExercice Ts 1ère f3josias zinsouPas encore d'évaluation
- Controle 1 2022 - 2023Document1 pageControle 1 2022 - 2023josias zinsouPas encore d'évaluation
- Controle 1 2021-2022Document1 pageControle 1 2021-2022josias zinsouPas encore d'évaluation
- 2ème Devoir Du 1er SemetreDocument2 pages2ème Devoir Du 1er Semetrejosias zinsouPas encore d'évaluation
- Examan Blanc CapDocument4 pagesExaman Blanc Capjosias zinsouPas encore d'évaluation
- Schéma TleDocument8 pagesSchéma Tlejosias zinsouPas encore d'évaluation
- EST Tle F3Document3 pagesEST Tle F3josias zinsouPas encore d'évaluation
- Examen Blanc Pobe2022 Est2Document4 pagesExamen Blanc Pobe2022 Est2josias zinsouPas encore d'évaluation
- TRAVAUX DIRIGES EN ETUDE DE SYSTEME TECHNIQUE OkDocument3 pagesTRAVAUX DIRIGES EN ETUDE DE SYSTEME TECHNIQUE Okjosias zinsou100% (1)
- Devoir 1 ESTDocument3 pagesDevoir 1 ESTjosias zinsouPas encore d'évaluation
- BROYEUR DE CEREALES2013 Devoir EST LTIDocument3 pagesBROYEUR DE CEREALES2013 Devoir EST LTIjosias zinsouPas encore d'évaluation
- Devoir 2 Semestre 1Document5 pagesDevoir 2 Semestre 1josias zinsouPas encore d'évaluation
- Contrôle N2 TerminaleDocument3 pagesContrôle N2 Terminalejosias zinsouPas encore d'évaluation
- Systeme de Lavage AUTOMATIQUE DE Véhicules: VerteDocument20 pagesSysteme de Lavage AUTOMATIQUE DE Véhicules: Vertejosias zinsouPas encore d'évaluation
- Chapitre 6 Eléments D'assemblage L1Document3 pagesChapitre 6 Eléments D'assemblage L1Franck Olivier TuoPas encore d'évaluation
- Intro ProgrammesDocument18 pagesIntro Programmeshichem tazirPas encore d'évaluation
- Armes Francaises Aa 52 Et N f1 1Document24 pagesArmes Francaises Aa 52 Et N f1 1Stanislas BrabantPas encore d'évaluation
- Ravoux Pieces de Rechange 1037620Document5 pagesRavoux Pieces de Rechange 1037620stef zziPas encore d'évaluation
- DDqbes SKF KDG JK CYDocument6 pagesDDqbes SKF KDG JK CYJérôme CanauxPas encore d'évaluation
- Transmettre 2024 - 2steDocument54 pagesTransmettre 2024 - 2stekhamissbenzPas encore d'évaluation
- Présentation Browning Auto 5Document22 pagesPrésentation Browning Auto 5Yorek 56Pas encore d'évaluation
- Les Instruments de Mesure CA - AMCA - 1Document88 pagesLes Instruments de Mesure CA - AMCA - 1Taha - VidéosPas encore d'évaluation
- Devoir de Contrôle N°1 2011 2012 (Abdellatif Heni)Document8 pagesDevoir de Contrôle N°1 2011 2012 (Abdellatif Heni)ayoub dably0% (1)
- Ramset Cobra Plus ManualDocument18 pagesRamset Cobra Plus ManualJose SanchezPas encore d'évaluation
- 1 P.K.M.S Généralités de L'arme PkmsDocument8 pages1 P.K.M.S Généralités de L'arme PkmsIlsanDjamal83% (6)
- Asy 7-9-12!14!18 LCC Dossier MaintenanceDocument80 pagesAsy 7-9-12!14!18 LCC Dossier MaintenanceRaphael MunerellePas encore d'évaluation
- Tous Types: Edition FrançaiseDocument3 pagesTous Types: Edition FrançaiseSylvain MariePas encore d'évaluation
- 1327658323vacuum Pump - Busch R5 0025 0100FDocument6 pages1327658323vacuum Pump - Busch R5 0025 0100FCARLOS GERMAN CABRERA ZAVALAPas encore d'évaluation
- SchematisationDocument10 pagesSchematisationAbdelKarim dergoulPas encore d'évaluation
- Domaines Utilisation PompesDocument1 pageDomaines Utilisation Pompessinou.25Pas encore d'évaluation
- Gamme D Usinage de La Piece 2Document3 pagesGamme D Usinage de La Piece 2Med Amine HattakiPas encore d'évaluation
- Catalogue ChambriardDocument12 pagesCatalogue ChambriardPhilippe LamoussierePas encore d'évaluation
- 1-Terex 1Document6 pages1-Terex 1Mohamed ElPas encore d'évaluation
- Gamme D Usinage de La Piece 2Document3 pagesGamme D Usinage de La Piece 2Med Amine HattakiPas encore d'évaluation
- M1 - Programmation, Réglage Et Conduite D'un Tour À Commande Numérique - MTP FANUCDocument22 pagesM1 - Programmation, Réglage Et Conduite D'un Tour À Commande Numérique - MTP FANUCZakaria El BoukilyPas encore d'évaluation
- Polo 1.4Document12 pagesPolo 1.4Mimid SbihiPas encore d'évaluation
- Le Montage D'usinage Corrigé PDFDocument4 pagesLe Montage D'usinage Corrigé PDFD. n50% (2)
- Fabrication MécaniqueDocument3 pagesFabrication Mécaniqueta9100% (3)
- CNC Pilot 640: Manuel D'utilisationDocument656 pagesCNC Pilot 640: Manuel D'utilisationwarmongers55Pas encore d'évaluation
- Grafcet Syst Machine Spéc DusinageDocument4 pagesGrafcet Syst Machine Spéc Dusinagemal omouri100% (1)
- DR 2023Document4 pagesDR 2023hamrouniPas encore d'évaluation
- Verins Telescopiques RT SopraDocument3 pagesVerins Telescopiques RT SopraCYRILLE PANCHUCHU NCHINMOUNPas encore d'évaluation