Vous aimerez peut-être aussi
- FreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesD'EverandFreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesPas encore d'évaluation
- MoteurDocument33 pagesMoteurGOUAREF SAMIR100% (1)
- (PDF) Formation de Base Sur Les Techniques de La Mecanique Auto PDFDocument69 pages(PDF) Formation de Base Sur Les Techniques de La Mecanique Auto PDFkhadim gueye50% (4)
- Bateau - Guide Pratique D'entretien Et de Réparation Des Moteurs DieselsDocument217 pagesBateau - Guide Pratique D'entretien Et de Réparation Des Moteurs DieselsChaker Amir67% (3)
- SSP 514 La Nouvelle Gamme de Moteurs Diesel EA288Document76 pagesSSP 514 La Nouvelle Gamme de Moteurs Diesel EA288OualidPas encore d'évaluation
- Système de Lubrification Et de GraissageDocument21 pagesSystème de Lubrification Et de GraissageHilali cena60% (5)
- Dommages Sur Les Coussinets - 870263Document72 pagesDommages Sur Les Coussinets - 870263pointet100% (1)
- Revue Technique Mercedes Classe C Cdi 2000 2004Document852 pagesRevue Technique Mercedes Classe C Cdi 2000 2004Denis100% (3)
- FormualireDocument5 pagesFormualireAdil Hassani IdrissiPas encore d'évaluation
- Les Liaisons Non Permanentes (ASSEMBLAGES) CH 04 1er Année GPLDocument14 pagesLes Liaisons Non Permanentes (ASSEMBLAGES) CH 04 1er Année GPLTom BriderPas encore d'évaluation
- Revue Clio 3 Dci 105chDocument48 pagesRevue Clio 3 Dci 105chEric DezaPas encore d'évaluation
- Fiche Sur Lecture Dun Dessin Densemble 1 PDFDocument9 pagesFiche Sur Lecture Dun Dessin Densemble 1 PDFSonia SalahPas encore d'évaluation
- Détail E Échelle 3:1: APLICATION: Observer Le Dessin D'ensemble de L'étau Et Répondre Aux Questions Ci-DessousDocument2 pagesDétail E Échelle 3:1: APLICATION: Observer Le Dessin D'ensemble de L'étau Et Répondre Aux Questions Ci-DessousGhebouli SamirPas encore d'évaluation
- Exercice ReducteurDocument8 pagesExercice ReducteurGyPas encore d'évaluation
- L1-PMI - TP 5 Dessin Industriel 2Document4 pagesL1-PMI - TP 5 Dessin Industriel 2Soufa Ane100% (1)
- TD 18 - Lois Entrée-Sortie en Position Et en VitesseDocument6 pagesTD 18 - Lois Entrée-Sortie en Position Et en Vitessebhs channelPas encore d'évaluation
- 27 Lubrification ÉtanchéitéDocument4 pages27 Lubrification ÉtanchéitéAnonymous Zu0p0SWg7Pas encore d'évaluation
- SSP 420 Moteur Audi TDI de 2,0l Avec Système D'injection Common RailDocument64 pagesSSP 420 Moteur Audi TDI de 2,0l Avec Système D'injection Common Railhadji skanderPas encore d'évaluation
- DevoirDeSyntheseN3 1AS 2008 Etau D'usinage Mixeur 2Document6 pagesDevoirDeSyntheseN3 1AS 2008 Etau D'usinage Mixeur 2Rabia ZaiedPas encore d'évaluation
- 6 Schematisation PDFDocument10 pages6 Schematisation PDFHanane TounsiPas encore d'évaluation
- Rotation D Un Solide Indeformable Autour D Un Axe Fixe Exercices Non Corriges 3Document2 pagesRotation D Un Solide Indeformable Autour D Un Axe Fixe Exercices Non Corriges 3Yns Frakchi75% (8)
- 02-Moteur 1.8L TSIDocument52 pages02-Moteur 1.8L TSIAhmed Slimen100% (1)
- Devoir de Synthèse N°1 - Technologie - 2ème Sciences Exp (2018-2019) MR KMIMECH Adel PDFDocument7 pagesDevoir de Synthèse N°1 - Technologie - 2ème Sciences Exp (2018-2019) MR KMIMECH Adel PDFadnenPas encore d'évaluation
- TP1-Etau de PlombierDocument14 pagesTP1-Etau de PlombierLucas PagesPas encore d'évaluation
- devoirN2CotationFonctionelle2AsGriffe2012 PDFDocument4 pagesdevoirN2CotationFonctionelle2AsGriffe2012 PDFlassouedPas encore d'évaluation
- Motor Engines FormationDocument28 pagesMotor Engines FormationEmerson Eduardo RodriguesPas encore d'évaluation
- Devoir de Contrôle N°1 - Génie Mécanique DC Pompe D'alimentation - 3ème Technique (2013-2014) MR Mlaouhi SlaheddineDocument6 pagesDevoir de Contrôle N°1 - Génie Mécanique DC Pompe D'alimentation - 3ème Technique (2013-2014) MR Mlaouhi SlaheddineBen nasseur Mohamed aliPas encore d'évaluation
- Des Grands Classiques de TopologieDocument12 pagesDes Grands Classiques de TopologieIsrae El Amri50% (2)
- Yamaha R1-2002 Manuel D'atelier (FR) PDFDocument471 pagesYamaha R1-2002 Manuel D'atelier (FR) PDFMiroslaw Gabalix Gabalis0% (1)
- MTZ 500-800-900 SMFDocument464 pagesMTZ 500-800-900 SMFHuerto FitoPas encore d'évaluation
- Cours MicrDocument30 pagesCours MicrDOUNIAPas encore d'évaluation
- DS1 - 1èr STEDocument4 pagesDS1 - 1èr STEmasteratsii100% (1)
- Exercices ENSAMDocument14 pagesExercices ENSAMAnass AzamiPas encore d'évaluation
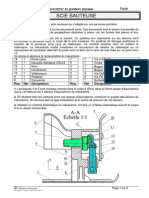
- TD20 Scie SauteuseDocument2 pagesTD20 Scie SauteuseNabiha LabidiPas encore d'évaluation
- Guidage en Translation PDFDocument10 pagesGuidage en Translation PDFAzerty DelegfrPas encore d'évaluation
- Enoncé DS2 Mars 20191 - 1Document2 pagesEnoncé DS2 Mars 20191 - 1Fatma LaribiPas encore d'évaluation
- Chaines de Cotes - Exercices - 2Document4 pagesChaines de Cotes - Exercices - 2Ameni Khaled100% (1)
- Dossier Réponses Page 1 / 8 Unite de Remplissage de FlaconsDocument3 pagesDossier Réponses Page 1 / 8 Unite de Remplissage de FlaconsMortadha RabahPas encore d'évaluation
- TD Compresseur PR PDFDocument6 pagesTD Compresseur PR PDFzohirPas encore d'évaluation
- Embr 2020Document4 pagesEmbr 2020Mortadha RabahPas encore d'évaluation
- Exercice REPRESENTATION DES FILETAGESDocument1 pageExercice REPRESENTATION DES FILETAGESkingslimPas encore d'évaluation
- CS LP TP Pyvot SujetDocument20 pagesCS LP TP Pyvot Sujetpierre chantelotPas encore d'évaluation
- TD FreinDocument5 pagesTD FreinHamami AymenPas encore d'évaluation
- EXERCICE10Document8 pagesEXERCICE10akouPas encore d'évaluation
- 01 Exercice BanderoleuseDocument1 page01 Exercice BanderoleuseESSOME ESSOME OLIVIER STEPHANEPas encore d'évaluation
- Cours Modelisation Des Liaisons eDocument7 pagesCours Modelisation Des Liaisons eMed Aymen Bensalem100% (1)
- Technologie: Note: ./20Document3 pagesTechnologie: Note: ./20Marouen MekkiPas encore d'évaluation
- Technologie: Devoir de Contrôle N°1 Section Sciences Techniques ÉpreuveDocument2 pagesTechnologie: Devoir de Contrôle N°1 Section Sciences Techniques ÉpreuveBouabdellaoui saif ennasrPas encore d'évaluation
- Saber DC N1 1S3 2021 2022'Document4 pagesSaber DC N1 1S3 2021 2022'Adam BensaidPas encore d'évaluation
- Devoir de Synthèse #2 - Génie Mécanique - Bac Technique (2013-2014) MR JEMAI Lotfi PDFDocument10 pagesDevoir de Synthèse #2 - Génie Mécanique - Bac Technique (2013-2014) MR JEMAI Lotfi PDFAmina NounaPas encore d'évaluation
- Série D'exercices N°2 - Génie Mécanique Cotation Fonctionnelle & Dessin de Définition - Bac Technique (2019-2020) MR Ben Abdallah MarouanDocument1 pageSérie D'exercices N°2 - Génie Mécanique Cotation Fonctionnelle & Dessin de Définition - Bac Technique (2019-2020) MR Ben Abdallah Marouannarim100% (1)
- TD Avant RattrapageDocument6 pagesTD Avant RattrapageBakary Biro100% (1)
- Contrôle Continu - Dessin Technique II - Juin 2020 - BonDocument7 pagesContrôle Continu - Dessin Technique II - Juin 2020 - BonStephane FochePas encore d'évaluation
- Variateurs de VitesseDocument2 pagesVariateurs de VitesseYekini Zulle DiattaPas encore d'évaluation
- Griffe de TourDocument3 pagesGriffe de TourYahya Aidara100% (1)
- Exercices de Filetage - eDocument4 pagesExercices de Filetage - echrisPas encore d'évaluation
- DT DC1 4TT ModifDocument3 pagesDT DC1 4TT ModifyahyaouiPas encore d'évaluation
- TD PerspectiveDocument2 pagesTD PerspectiveSkanderPas encore d'évaluation
- Corrige DS2 3ST DT DR GM GE Region KairouanDocument8 pagesCorrige DS2 3ST DT DR GM GE Region KairouanBouabdellaoui saif ennasrPas encore d'évaluation
- Dossier CorrigeDocument7 pagesDossier CorrigeKamel TayahiPas encore d'évaluation
- Liaison EncastrementDocument18 pagesLiaison Encastrementkhocine100% (1)
- Partie 3 Etude Des SystemesDocument52 pagesPartie 3 Etude Des SystemesMAD-ALLAH OryaitaPas encore d'évaluation
- 17 Cours Les AjustementsDocument2 pages17 Cours Les Ajustementsahmed vlogs100% (1)
- Chapitre 3 Guidage Mai 2020Document33 pagesChapitre 3 Guidage Mai 2020Loic ReyesPas encore d'évaluation
- 07 Butee TrainardDocument5 pages07 Butee TrainardHkiri MohamedPas encore d'évaluation
- Cours Cotation Fonctionnelle PRDocument4 pagesCours Cotation Fonctionnelle PRRachid TopPas encore d'évaluation
- Correction Chapes Applications Dessin+de+definition Coupesimple 2012 2AS NetDocument3 pagesCorrection Chapes Applications Dessin+de+definition Coupesimple 2012 2AS Netchaouch.najehPas encore d'évaluation
- Train Epicycloidal Simple PDFDocument4 pagesTrain Epicycloidal Simple PDFEdgar ÉtapePas encore d'évaluation
- Cours Modelisation Des Liaisons eDocument8 pagesCours Modelisation Des Liaisons entayoub100% (1)
- Exercice Cotation Fonctionnelle PDFDocument5 pagesExercice Cotation Fonctionnelle PDFNarjiss ShimiPas encore d'évaluation
- Devoir de Synthèse N°2 2012 2013 (Abdallah Raouafi) PDFDocument4 pagesDevoir de Synthèse N°2 2012 2013 (Abdallah Raouafi) PDFSimo StitPas encore d'évaluation
- EPREUVE - TECHNOLOGIE Génie Mécanique. Convoyeur À BandeDocument6 pagesEPREUVE - TECHNOLOGIE Génie Mécanique. Convoyeur À BandeYounes El GhandouriPas encore d'évaluation
- App3 Rep STE STM SMB PDFDocument10 pagesApp3 Rep STE STM SMB PDFNSANGOUPas encore d'évaluation
- VI - Description de La Partie Opérative: (: Baladeur Inverseur, Formée Par Le CoupleDocument8 pagesVI - Description de La Partie Opérative: (: Baladeur Inverseur, Formée Par Le Coupleedem.mejri1920Pas encore d'évaluation
- Exercices Ajustements LvespdfDocument6 pagesExercices Ajustements LvespdfAbdessamad MoutchouPas encore d'évaluation
- Modélisation D'un Moteur Complet en Perte D'aube en Dynamique RapideDocument176 pagesModélisation D'un Moteur Complet en Perte D'aube en Dynamique RapideIsrae El AmriPas encore d'évaluation
- CCP Sii MP 2005 EpreuveDocument29 pagesCCP Sii MP 2005 EpreuveIsrae El AmriPas encore d'évaluation
- Centrale Supelec MP Sii 2010 EpreuveDocument12 pagesCentrale Supelec MP Sii 2010 EpreuveIsrae El AmriPas encore d'évaluation
- TD& ExamenVfDocument97 pagesTD& ExamenVfMohsen Saidi67% (3)
- 03 MoteurDocument21 pages03 Moteurfloleto3Pas encore d'évaluation
- Pfe Winox 18 09 2022Document74 pagesPfe Winox 18 09 2022Tonkam ArthurPas encore d'évaluation
- 03b Moteurs DieselDocument42 pages03b Moteurs Dieselmohhizbar100% (2)
- Thèse Khalid - Zarbane 2009Document166 pagesThèse Khalid - Zarbane 2009khalidzarbanePas encore d'évaluation
- M05 Etude Des Moteurs Thermiques OFPPT ParDocument38 pagesM05 Etude Des Moteurs Thermiques OFPPT ParNourddinePas encore d'évaluation
- Cours 7Document44 pagesCours 7Nedia NaghmouchiPas encore d'évaluation
- Fendt Favorit 716: Fiche TechniqueDocument8 pagesFendt Favorit 716: Fiche TechniqueJean-michel HuetPas encore d'évaluation
- Dommages Sur Les Coussinets - 870263Document72 pagesDommages Sur Les Coussinets - 870263Mathieu DouPas encore d'évaluation
- Chapitre VDocument14 pagesChapitre Vissam nemoulPas encore d'évaluation
- Activités ÉlèvesDocument16 pagesActivités ÉlèvesAeroEaglePas encore d'évaluation
- Memoire Madone Version RecenteDocument43 pagesMemoire Madone Version RecenteMadone JrPas encore d'évaluation
- Etude Systeme - Bielle - ManivelleDocument21 pagesEtude Systeme - Bielle - ManivelleFradj TriplexPas encore d'évaluation
- Rapport de Stage de TREMOADocument28 pagesRapport de Stage de TREMOAMOHSINE ELKRAICHI100% (1)
- Ssp118 - FR Moteur 1,4 L Tsi 16 V 92 KWDocument60 pagesSsp118 - FR Moteur 1,4 L Tsi 16 V 92 KWNinou VivanoPas encore d'évaluation
- Transformation EnergieDocument4 pagesTransformation EnergieOualid OuadoudiPas encore d'évaluation
- Forces 1Document41 pagesForces 1chasePas encore d'évaluation