Vous aimerez peut-être aussi
- Exercices d'optique et d'électromagnétismeD'EverandExercices d'optique et d'électromagnétismeÉvaluation : 5 sur 5 étoiles5/5 (1)
- Cours Des Moteurs AsynchronesDocument40 pagesCours Des Moteurs AsynchronesBALLOUK Soufiane100% (5)
- Exercices d'intégrales de lignes, de surfaces et de volumesD'EverandExercices d'intégrales de lignes, de surfaces et de volumesPas encore d'évaluation
- Cours Machine AsynchroneDocument28 pagesCours Machine AsynchroneMeryem El MennaouyPas encore d'évaluation
- Cours AlternateurDocument7 pagesCours Alternateuranyos_05100% (2)
- Cours Moteur AsynchroneDocument11 pagesCours Moteur AsynchroneSOUKAINA NHARI100% (1)
- Fonction Convertir Moteurs Asynchrones 2 Bac Science Dingenieur PDFDocument8 pagesFonction Convertir Moteurs Asynchrones 2 Bac Science Dingenieur PDFAmscool SavadogoPas encore d'évaluation
- A propos du Digital!: Le digital pour tous! Le numérique en questions/réponses pour le modélisme ferroviaireD'EverandA propos du Digital!: Le digital pour tous! Le numérique en questions/réponses pour le modélisme ferroviaireÉvaluation : 3.5 sur 5 étoiles3.5/5 (3)
- Machines Synchrones Et AsynchronesDocument18 pagesMachines Synchrones Et Asynchronestaylhor100% (3)
- 14 Les Machines SynchronesDocument13 pages14 Les Machines Synchronesmolodme380Pas encore d'évaluation
- 4 Spécificités Techniques Chambre HospitalisationDocument38 pages4 Spécificités Techniques Chambre Hospitalisationr.benouhoudPas encore d'évaluation
- Fonction Convertir Machines Synchrones Triphases CoursDocument5 pagesFonction Convertir Machines Synchrones Triphases CoursdddddPas encore d'évaluation
- Cours Machines AsynchronesDocument53 pagesCours Machines Asynchronesminoungou constantPas encore d'évaluation
- Moteur AsynchroneDocument9 pagesMoteur AsynchroneMahdi El MarrakchiPas encore d'évaluation
- Le Moteur Asynchrone Triphase - Pour FusionDocument31 pagesLe Moteur Asynchrone Triphase - Pour FusionHamidou GamboPas encore d'évaluation
- C2 JavelDocument3 pagesC2 JavelFoudil LaouiciPas encore d'évaluation
- MAS Cours CompletDocument39 pagesMAS Cours Completطنين نسنسPas encore d'évaluation
- Cours Mas Fa2026Document7 pagesCours Mas Fa2026Dile Stephen SAMBA SAMBAPas encore d'évaluation
- Cours - Machines - Asynchrones MODELISATIONDocument53 pagesCours - Machines - Asynchrones MODELISATIONtamsirniangPas encore d'évaluation
- Variation de Vitesse Des Moteurs ÉlectriquesDocument44 pagesVariation de Vitesse Des Moteurs ÉlectriquesmaronnamPas encore d'évaluation
- SDF MaintenanceDocument151 pagesSDF MaintenanceNour Imane100% (1)
- Résumé Moteur Asynchrone Avec ExercicesDocument5 pagesRésumé Moteur Asynchrone Avec ExercicesjamesPas encore d'évaluation
- Electrotec MachinesAlternatifDocument15 pagesElectrotec MachinesAlternatifMa HdiPas encore d'évaluation
- 02 Moteur AsynchroneDocument11 pages02 Moteur AsynchroneLebel NkogoPas encore d'évaluation
- Cours - Electricite - Moteur Asynchrone - Terminale StiDocument11 pagesCours - Electricite - Moteur Asynchrone - Terminale StiAissam EssanhajiPas encore d'évaluation
- Machine AsynchroneDocument7 pagesMachine AsynchroneFatma Borgi Ep SaadaouiPas encore d'évaluation
- cours-MASDocument12 pagescours-MASfouadPas encore d'évaluation
- CH 8 Machine SynchroneDocument11 pagesCH 8 Machine Synchronesoufiane8fkaPas encore d'évaluation
- Cours - Mas Mon ResumeDocument39 pagesCours - Mas Mon ResumeAZIZ81936Pas encore d'évaluation
- TP TalendDocument29 pagesTP TalendKawtarSolo100% (2)
- Moteur AsynchroneDocument12 pagesMoteur Asynchroneasmaahmedhassan12Pas encore d'évaluation
- Chapitre 2-1Document10 pagesChapitre 2-1Oussama JaafariPas encore d'évaluation
- Chapitre I - MAS (Cours)Document11 pagesChapitre I - MAS (Cours)Youssef dbPas encore d'évaluation
- MAS 3phDocument23 pagesMAS 3phabdelwahad100% (1)
- Machine AsynchroneDocument16 pagesMachine AsynchroneEr-Rhahmani MedPas encore d'évaluation
- Convertir Machine AsynchroneDocument5 pagesConvertir Machine AsynchroneBALLOUK SoufianePas encore d'évaluation
- Machine Asynchrone TolotraDocument11 pagesMachine Asynchrone TolotraManoaPas encore d'évaluation
- TP Elt2Document8 pagesTP Elt2Sa RahPas encore d'évaluation
- Moteur Asynchrone TriphaséDocument10 pagesMoteur Asynchrone Triphaséamos carlos gueiPas encore d'évaluation
- Chap3 Variation de Vitesse de La MasDocument9 pagesChap3 Variation de Vitesse de La Masrafik16Pas encore d'évaluation
- Moteur AsynchroneDocument11 pagesMoteur Asynchronemonir.bouanan26Pas encore d'évaluation
- Moteurs Asynchrones TriphasésDocument34 pagesMoteurs Asynchrones TriphasésMajda SerbatPas encore d'évaluation
- MasDocument16 pagesMasSôûLãymãne BénPas encore d'évaluation
- 1CPI Cours MASDocument8 pages1CPI Cours MASANDAHMOUPas encore d'évaluation
- MoteurAsynchrone PDFDocument3 pagesMoteurAsynchrone PDFomarah4550% (2)
- Theoreme de FerarriDocument4 pagesTheoreme de FerarriKamita Medias100% (1)
- Cours Lp3eme Chapitre Moteur AsynchroneDocument15 pagesCours Lp3eme Chapitre Moteur AsynchroneSimo LaassiriPas encore d'évaluation
- B3-Moteur Asynchrone Triphasé-2021-ÉlèveDocument13 pagesB3-Moteur Asynchrone Triphasé-2021-ÉlèveKadri MongiPas encore d'évaluation
- Cours Moteurs CorrigéDocument8 pagesCours Moteurs Corrigékevin DEBADE100% (2)
- B3-Moteur Asynchrone Triphasé-2020-ÉlèveDocument12 pagesB3-Moteur Asynchrone Triphasé-2020-ÉlèveArfaoui AymenPas encore d'évaluation
- Chap4 Variation de Vitesse de La MASDocument9 pagesChap4 Variation de Vitesse de La MASAyoub BOUELAMPas encore d'évaluation
- Chapitre 2 M1 MEADocument32 pagesChapitre 2 M1 MEAMOUH MIDOPas encore d'évaluation
- Emploi Du Temps Groupes 26-12-22Document9 pagesEmploi Du Temps Groupes 26-12-22MaGMaaa WKPas encore d'évaluation
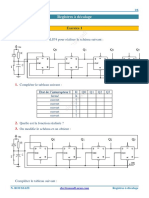
- E RegistresDocument6 pagesE RegistresHassane BenPas encore d'évaluation
- Horaire Ramadan 2023Document1 pageHoraire Ramadan 2023MaGMaaa WKPas encore d'évaluation
- Commande Électronique Des Moteurs 3Document268 pagesCommande Électronique Des Moteurs 3MaGMaaa WKPas encore d'évaluation
- 5S MethodeDocument1 page5S MethodeZakaria KhatarPas encore d'évaluation
- Abs R19 16SDocument5 pagesAbs R19 16SHichamRabanePas encore d'évaluation
- Ds Topographie 1GC Iset Nabeul 2012Document3 pagesDs Topographie 1GC Iset Nabeul 2012Soulaima Seddiki100% (1)
- CND Chapitre4Document12 pagesCND Chapitre4yasmina magriPas encore d'évaluation
- Rapport Devoir 2Document8 pagesRapport Devoir 2line caulfutyPas encore d'évaluation
- Valorisation Des Fibres de Kénaf Dans Des Applications Textiles Et ParatextilesDocument153 pagesValorisation Des Fibres de Kénaf Dans Des Applications Textiles Et Paratextilesserhrouchni nourelhoudaPas encore d'évaluation
- Manuel Pour Pompe HaywardDocument12 pagesManuel Pour Pompe HaywardYannick RainvillePas encore d'évaluation
- Martin LudovicDocument54 pagesMartin LudovicLoubna MiagePas encore d'évaluation
- Manual PewagDocument60 pagesManual Pewagmrpt2015Pas encore d'évaluation
- PresseDocument70 pagesPresseMalcolm EmilePas encore d'évaluation
- 04 Awt SwingDocument83 pages04 Awt SwingChafik BerdjouhPas encore d'évaluation
- Anios Steril AES+ECODocument1 pageAnios Steril AES+ECOYassine JazoulierPas encore d'évaluation
- VSOMFT Formation Vmware Vsphere With Operations Management Fast Track PDFDocument3 pagesVSOMFT Formation Vmware Vsphere With Operations Management Fast Track PDFCertyouFormationPas encore d'évaluation
- Tunnel - 4 Note de Calcul PDFDocument56 pagesTunnel - 4 Note de Calcul PDFGhani LrPas encore d'évaluation
- 9 DTDocument38 pages9 DTAbdellah OUAHIDI100% (1)
- RapportDocument5 pagesRapportAnas OuarbyaPas encore d'évaluation
- Bu 3 Flambage v2Document5 pagesBu 3 Flambage v2Klolay Bledja Cyntiche AllaPas encore d'évaluation
- DST GC0704Document2 pagesDST GC0704princyvondoPas encore d'évaluation
- Rapport de STDocument35 pagesRapport de STX HunterPas encore d'évaluation
- Stage RachedDouahchia PDFDocument4 pagesStage RachedDouahchia PDFRached DouahchuaPas encore d'évaluation
- FICHE TD Etat MoteurDocument12 pagesFICHE TD Etat MoteurFakhreddine Ben MhenniPas encore d'évaluation
- Catalogue SanoTek RetailDocument8 pagesCatalogue SanoTek RetailEssamoual MohamedPas encore d'évaluation
- Document 11Document10 pagesDocument 11JamsePas encore d'évaluation
- Drainage AgricoleDocument21 pagesDrainage AgricoleMamadou lamine CamaraPas encore d'évaluation
- 4 Formule BruteDocument2 pages4 Formule BruteNajib Nouisser100% (2)
- These Dupuy 2008Document203 pagesThese Dupuy 2008Jihen BoukadidaPas encore d'évaluation
- Lettre Motivation Dut Informatique 5Document2 pagesLettre Motivation Dut Informatique 5Stephane LoePas encore d'évaluation