Vous aimerez peut-être aussi
- Chap4 Variation de Vitesse de La MASDocument9 pagesChap4 Variation de Vitesse de La MASAyoub BOUELAMPas encore d'évaluation
- Chapitre I - MAS (Cours)Document11 pagesChapitre I - MAS (Cours)Youssef dbPas encore d'évaluation
- Vitesse de SynchronismeDocument23 pagesVitesse de Synchronismei kPas encore d'évaluation
- MAS Cours CompletDocument39 pagesMAS Cours Completطنين نسنسPas encore d'évaluation
- Moteur AsynchroneDocument12 pagesMoteur Asynchroneasmaahmedhassan12Pas encore d'évaluation
- 2cours Technique de Commande de La Vitesse MAS 2ème Chapitre 2020Document13 pages2cours Technique de Commande de La Vitesse MAS 2ème Chapitre 2020Sa BinPas encore d'évaluation
- MAS3 - CoursDocument5 pagesMAS3 - Coursben 10Pas encore d'évaluation
- Cours Des Moteurs AsynchronesDocument40 pagesCours Des Moteurs AsynchronesBALLOUK Soufiane100% (5)
- Chapitre 3 Entrainements ElectriquesDocument29 pagesChapitre 3 Entrainements Electriquesdanazevedo82Pas encore d'évaluation
- 02 Moteur AsynchroneDocument11 pages02 Moteur AsynchroneLebel NkogoPas encore d'évaluation
- Cours Machines AsynchronesDocument53 pagesCours Machines Asynchronesminoungou constantPas encore d'évaluation
- 3 Cours Machines AsynchronesDocument5 pages3 Cours Machines AsynchronesanesPas encore d'évaluation
- Historique: I.1 Eléments Constituant de La Machine AsynchroneDocument12 pagesHistorique: I.1 Eléments Constituant de La Machine Asynchronebenke manouPas encore d'évaluation
- Chapitre II Le Moteur AsynchroneDocument12 pagesChapitre II Le Moteur AsynchroneAziz Kabore100% (1)
- Cours - Machines - Asynchrones MODELISATIONDocument53 pagesCours - Machines - Asynchrones MODELISATIONtamsirniangPas encore d'évaluation
- Modélisation de La Génératrice AsynchroneDocument33 pagesModélisation de La Génératrice AsynchroneLaila JamilPas encore d'évaluation
- MasDocument16 pagesMasSôûLãymãne BénPas encore d'évaluation
- Moteur Asynchrone MonophaséDocument7 pagesMoteur Asynchrone Monophasélamia lamiaPas encore d'évaluation
- Chapitre 2-1Document10 pagesChapitre 2-1Oussama JaafariPas encore d'évaluation
- Cours Machine AsynchroneDocument28 pagesCours Machine AsynchroneMeryem El MennaouyPas encore d'évaluation
- E04 Moteur AsynchroneDocument17 pagesE04 Moteur AsynchroneBabacarDiagoPas encore d'évaluation
- Chap 4 Moteur Asynchrone TriphaséDocument9 pagesChap 4 Moteur Asynchrone TriphasékahanparfaitPas encore d'évaluation
- Machine Tournante À Courant AlternatifDocument6 pagesMachine Tournante À Courant AlternatifSofiane HAMCHAOUIPas encore d'évaluation
- cours-MASDocument12 pagescours-MASfouadPas encore d'évaluation
- Chapitre 1 Rappels Les Machines Asynchrones TriphaseesDocument9 pagesChapitre 1 Rappels Les Machines Asynchrones TriphaseesNuno HenriquesPas encore d'évaluation
- Var - Chap - 3 - Modélisation Et Commande de MAS V1Document22 pagesVar - Chap - 3 - Modélisation Et Commande de MAS V1Rayane KORA ZAKIPas encore d'évaluation
- Commande Du Moteur AsynchroneDocument78 pagesCommande Du Moteur AsynchroneTHONYPas encore d'évaluation
- Le Moteur Asynchrone TriphaseDocument8 pagesLe Moteur Asynchrone TriphaseaminePas encore d'évaluation
- Chapitre.3.actionneursDocument11 pagesChapitre.3.actionneursFaten Bayou0% (1)
- Cours4-Moteur AsynchroneDocument10 pagesCours4-Moteur AsynchroneFakhri Ghrairi100% (1)
- Electrotec MachinesAlternatifDocument15 pagesElectrotec MachinesAlternatifMa HdiPas encore d'évaluation
- Moteurs Asynchrones TriphasésDocument34 pagesMoteurs Asynchrones TriphasésMajda SerbatPas encore d'évaluation
- Moteur Asynchrone TriphaséDocument10 pagesMoteur Asynchrone Triphaséamos carlos gueiPas encore d'évaluation
- TP Commande ScalaireDocument24 pagesTP Commande ScalaireOkba100% (1)
- Diapo N°7-MAS-EtDocument38 pagesDiapo N°7-MAS-EtsaidPas encore d'évaluation
- 0 - Vitesse Des Moteurs AsynchronesDocument4 pages0 - Vitesse Des Moteurs AsynchronesHîChàmBàQàsPas encore d'évaluation
- 0 - Vitesse Des Moteurs AsynchronesDocument4 pages0 - Vitesse Des Moteurs Asynchronessouheil khalifaPas encore d'évaluation
- Fonction Convertir Moteurs Asynchrones 2 Bac Science Dingenieur PDFDocument8 pagesFonction Convertir Moteurs Asynchrones 2 Bac Science Dingenieur PDFAmscool SavadogoPas encore d'évaluation
- 14 Les Machines SynchronesDocument13 pages14 Les Machines Synchronesmolodme380Pas encore d'évaluation
- Chapitre2 Machine AsynchroneDocument26 pagesChapitre2 Machine Asynchroneafif tarkhaniPas encore d'évaluation
- Cours MAS RésuméDocument7 pagesCours MAS RésuméMak HimPas encore d'évaluation
- Actionneurs Electriques++Document62 pagesActionneurs Electriques++Sid Ahmed BenmamasPas encore d'évaluation
- Machine AsynchroneDocument16 pagesMachine AsynchroneEr-Rhahmani MedPas encore d'évaluation
- Chapitre1_MAS_Triphasé️-BOUZI (2)Document10 pagesChapitre1_MAS_Triphasé️-BOUZI (2)kawtar elbirakiPas encore d'évaluation
- Chapitre 1 Modélisation de La Machine Asynchrone Double Étoile Et Son AlimentationDocument38 pagesChapitre 1 Modélisation de La Machine Asynchrone Double Étoile Et Son AlimentationOmari GE50% (4)
- Chap 6Document11 pagesChap 6Nch NMPas encore d'évaluation
- 5Document18 pages5Reda SebaaPas encore d'évaluation
- TP MasDocument16 pagesTP MasMajected92100% (1)
- 0 - Moteur Asynchrone A Cage Final - Docx Li ELM-1Document15 pages0 - Moteur Asynchrone A Cage Final - Docx Li ELM-1Salim BelkhirPas encore d'évaluation
- Chapitre 1 Rappels Les Machines Asynchrones TriphaseesDocument8 pagesChapitre 1 Rappels Les Machines Asynchrones Triphaseeshachimou roufaiPas encore d'évaluation
- Chapitre 4 MAS G15Document29 pagesChapitre 4 MAS G15Coumba Laobė NdiayePas encore d'évaluation
- Chapitre5 MASDocument10 pagesChapitre5 MASsmail chaariPas encore d'évaluation
- Réglage de La Vitesse de RotationDocument13 pagesRéglage de La Vitesse de Rotationous1990Pas encore d'évaluation
- Chapitre 2 M1 MEADocument32 pagesChapitre 2 M1 MEAMOUH MIDOPas encore d'évaluation
- Asg 3 Moteurs Et ChargesDocument28 pagesAsg 3 Moteurs Et ChargesOussama SaeighPas encore d'évaluation
- Moteur AsynchroneDocument9 pagesMoteur AsynchroneYassine ZaharPas encore d'évaluation
- Exercices d'optique et d'électromagnétismeD'EverandExercices d'optique et d'électromagnétismeÉvaluation : 5 sur 5 étoiles5/5 (1)
- PTE15N Fiche TechniqueDocument1 pagePTE15N Fiche Techniquerafik16Pas encore d'évaluation
- Enceinte Murale SpheriqueDocument4 pagesEnceinte Murale Spheriquerafik16Pas encore d'évaluation
- LB - 20 - Serie 60 WDocument4 pagesLB - 20 - Serie 60 Wrafik16Pas encore d'évaluation
- Prevention Contre Les incendies-BELU-frDocument40 pagesPrevention Contre Les incendies-BELU-frrafik16Pas encore d'évaluation
- Lb2 Uc15 Enceint 15wDocument5 pagesLb2 Uc15 Enceint 15wrafik16Pas encore d'évaluation
- Enceinte Electo-VoiceDocument4 pagesEnceinte Electo-Voicerafik16Pas encore d'évaluation
- Enceinte Encastrable PlafondDocument2 pagesEnceinte Encastrable Plafondrafik16Pas encore d'évaluation
- Lb2 Uc30 Enceinte 30wDocument5 pagesLb2 Uc30 Enceinte 30wrafik16Pas encore d'évaluation
- Electrovoice 02evid - s8 - SadimetDocument4 pagesElectrovoice 02evid - s8 - Sadimetrafik16Pas encore d'évaluation
- RatoDocument25 pagesRatoSofiane RwinzoPas encore d'évaluation
- Texte FDocument5 pagesTexte FMimoun SaltaniPas encore d'évaluation
- TD MH VF 2021 2022Document8 pagesTD MH VF 2021 2022Reza RezaPas encore d'évaluation
- BTS EEC Sciences Physiques 2014 Corrige 40977Document2 pagesBTS EEC Sciences Physiques 2014 Corrige 40977LagaffPas encore d'évaluation
- ArcelorMittal FR en RUDocument244 pagesArcelorMittal FR en RUNistrean DanielPas encore d'évaluation
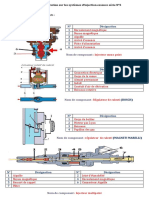
- Exercice D'injection Essence 2 CorrigéDocument3 pagesExercice D'injection Essence 2 Corrigéayoub talha100% (1)
- CIC Guide-Immobilier 2010Document32 pagesCIC Guide-Immobilier 2010niwie81Pas encore d'évaluation
- Corrigé Contrôle1TCT.1Document2 pagesCorrigé Contrôle1TCT.1Mouhamed DiengPas encore d'évaluation
- CEC7 PRO v2.0 FRDocument51 pagesCEC7 PRO v2.0 FRK دhaled Benam ع100% (1)
- Chedotthese EC Doct PDFDocument128 pagesChedotthese EC Doct PDFoxovxkuptrxdomumsyPas encore d'évaluation
- S1 EXO4 2APIC (WWW - Pc1.ma)Document2 pagesS1 EXO4 2APIC (WWW - Pc1.ma)Ayoub MhdPas encore d'évaluation
- Conception Des Reservoirs D Eau Potable PDFDocument2 pagesConception Des Reservoirs D Eau Potable PDFNgoma Junior100% (5)
- Moteur SynchroneDocument11 pagesMoteur SynchroneAhmed MidoPas encore d'évaluation
- Solaire PV Formalites 07Document24 pagesSolaire PV Formalites 07Jean-Luc MasaboPas encore d'évaluation
- Décathlon Kalenji W100MDocument2 pagesDécathlon Kalenji W100Mlaurent llacelPas encore d'évaluation
- 22 - AMDEC - Exemple D'un Circuit de Graissage - FichesDocument6 pages22 - AMDEC - Exemple D'un Circuit de Graissage - FichesthekrumpPas encore d'évaluation
- Gconcmoegarde Corpssept20216webDocument120 pagesGconcmoegarde Corpssept20216webtajou belakhdarPas encore d'évaluation
- Mémoire BAKO J M 2ie M2 GEERDocument56 pagesMémoire BAKO J M 2ie M2 GEERabfstbmsodPas encore d'évaluation
- CETIM - Eau de Lavage PDFDocument20 pagesCETIM - Eau de Lavage PDFRida ZianiPas encore d'évaluation
- 1950 IDEAL Radiateur 20111015Document36 pages1950 IDEAL Radiateur 20111015Lahouari FatahPas encore d'évaluation
- Programme Formation ECODIAL EP05Document1 pageProgramme Formation ECODIAL EP05Amar MeloukPas encore d'évaluation
- Cours Comsys ElecDocument240 pagesCours Comsys ElecbabersonPas encore d'évaluation
- Ilovepdf Merged RemovedDocument45 pagesIlovepdf Merged RemovedSirineJamoussiPas encore d'évaluation
- Turbomachines Systemes Energetiques PDFDocument1 pageTurbomachines Systemes Energetiques PDFWali MuhammadsalemPas encore d'évaluation
- ProjetDocument8 pagesProjetbouchtaoui imanePas encore d'évaluation
- Polycopie Cours NaamaDocument50 pagesPolycopie Cours Naamaxenaman17Pas encore d'évaluation
- M.Douezy Enonce Ds 4 4 12 Enonce Ds 1 S 4 4 12 Avancement Et Lois Et Modeles 1483656512Document5 pagesM.Douezy Enonce Ds 4 4 12 Enonce Ds 1 S 4 4 12 Avancement Et Lois Et Modeles 1483656512الغزيزال الحسن EL GHZIZAL HassanePas encore d'évaluation
- Resolution Chap06 Corrige Du Chapitre 6 de Benson Physique 2Document18 pagesResolution Chap06 Corrige Du Chapitre 6 de Benson Physique 2ericgrigoras56Pas encore d'évaluation
- 1 PhotolumDocument25 pages1 Photolummmade2318Pas encore d'évaluation
- LTM 1090/2 - Tourelle OW-03: Description TechniqueDocument6 pagesLTM 1090/2 - Tourelle OW-03: Description TechniqueSarra ChouchenePas encore d'évaluation