Vous aimerez peut-être aussi
- Technologie Et Réglage Des Régulateurs PDFDocument25 pagesTechnologie Et Réglage Des Régulateurs PDFKaziiLaggounPas encore d'évaluation
- Boucle Courant 4 20maDocument9 pagesBoucle Courant 4 20maAminoModric100% (1)
- Régulation Et Instrumentation1Document11 pagesRégulation Et Instrumentation1Mohammed SalahPas encore d'évaluation
- Régulation Industrielle-Chapitre 3-2017-1-BF (Mode de Compatibilité)Document25 pagesRégulation Industrielle-Chapitre 3-2017-1-BF (Mode de Compatibilité)amine milano100% (2)
- IntroDocument15 pagesIntroAboubakr BelarbiPas encore d'évaluation
- Régulation PIDDocument15 pagesRégulation PIDredwanePas encore d'évaluation
- CAPTEURDocument97 pagesCAPTEURdeath notePas encore d'évaluation
- Logique Positive & Négative de CâblageDocument3 pagesLogique Positive & Négative de CâblageMARDOUMA100% (1)
- TD1 - Introduction - Schémas TIDocument3 pagesTD1 - Introduction - Schémas TIbenlamlih100% (2)
- Formation Tia STEP7Document7 pagesFormation Tia STEP7Hamadi Ben SassiPas encore d'évaluation
- 6 Instrumentation Industrielle Transmetteur PDFDocument17 pages6 Instrumentation Industrielle Transmetteur PDFDODOHICHAMPas encore d'évaluation
- Licence ELT-2017-QCM-Question de cours-BFDocument10 pagesLicence ELT-2017-QCM-Question de cours-BFamine milano100% (3)
- Cours - Organes D'asservissementDocument71 pagesCours - Organes D'asservissementDaniele NephtysPas encore d'évaluation
- Travaux Pratique RegulationDocument22 pagesTravaux Pratique RegulationAhmed LabidiPas encore d'évaluation
- L'Instrumentation Et La Régulation IndustrielleDocument85 pagesL'Instrumentation Et La Régulation IndustrielleRed1 share80% (5)
- 9-Chapitre 3.circuit de Conditionnement D'un CapteurDocument36 pages9-Chapitre 3.circuit de Conditionnement D'un CapteurMeryouma LarbPas encore d'évaluation
- Cours CapteursDocument113 pagesCours Capteursspeed73Pas encore d'évaluation
- Capteur2 CapteursDocument49 pagesCapteur2 CapteursDjamel Benoudjit100% (2)
- TD 1 LadderDocument17 pagesTD 1 LadderImad ImadPas encore d'évaluation
- Cour Capteurs Et TransmetteulmmmmrsDocument511 pagesCour Capteurs Et TransmetteulmmmmrsFox Ben100% (2)
- Le But de La Régulation D'un Système AutomatiséDocument18 pagesLe But de La Régulation D'un Système AutomatisékaimissPas encore d'évaluation
- Step7 2Document110 pagesStep7 2Kader Arbia100% (2)
- Document1TPautoTS22012 PDFDocument42 pagesDocument1TPautoTS22012 PDFAYOUBPas encore d'évaluation
- Capteurs CC 2014 2015Document5 pagesCapteurs CC 2014 2015Yasmine Axelle DielbeogoPas encore d'évaluation
- TD - Capteur Capacitif de ProximitéDocument6 pagesTD - Capteur Capacitif de ProximitéHsan HaddarPas encore d'évaluation
- AS I (Sensor Bus)Document19 pagesAS I (Sensor Bus)رامي بن روبةPas encore d'évaluation
- Capteurs Et TransmetteursDocument18 pagesCapteurs Et TransmetteursNoui MouhamedPas encore d'évaluation
- CapteursDocument39 pagesCapteursSaidSadki100% (1)
- Comment Cabler Un Capteur 0-4-20 MADocument2 pagesComment Cabler Un Capteur 0-4-20 MAMamour brshimPas encore d'évaluation
- Support Cours1Document6 pagesSupport Cours1AminoModricPas encore d'évaluation
- ChapI 6 Conditionneurs PassifsDocument35 pagesChapI 6 Conditionneurs PassifsAhmed MallekhPas encore d'évaluation
- Travaux Dirigés de Régulation Industrielle AnalogiqueDocument38 pagesTravaux Dirigés de Régulation Industrielle AnalogiqueOthmane Jalal100% (4)
- Chapitre IV Systèmes de Transmission Pour CapteursDocument18 pagesChapitre IV Systèmes de Transmission Pour CapteursGhali Fatima100% (1)
- TDCorrectionDocument46 pagesTDCorrectionRomaël YenoPas encore d'évaluation
- Conversion Analogique en NumériqueDocument4 pagesConversion Analogique en NumériqueHaryoran100% (2)
- Cours API Siemens/Allen BradleyDocument104 pagesCours API Siemens/Allen BradleySimo Guermoud80% (5)
- CHP IV - Conditionnement Du Signal Du Capteur PDFDocument98 pagesCHP IV - Conditionnement Du Signal Du Capteur PDFAFAF100% (1)
- Conversion PDFDocument25 pagesConversion PDFLam NovoxPas encore d'évaluation
- Régulation IndustrielleDocument2 pagesRégulation IndustrielleDiaa Eddine BoudiafPas encore d'évaluation
- Document1TPautoTS22012 PDFDocument42 pagesDocument1TPautoTS22012 PDFfadacenglinPas encore d'évaluation
- Document TP n1 Auto Ts2 2013-2014Document57 pagesDocument TP n1 Auto Ts2 2013-2014iyed gara100% (1)
- Automatismes Industriels 2 Eme Annee Gen PDFDocument47 pagesAutomatismes Industriels 2 Eme Annee Gen PDFAmmar BahijPas encore d'évaluation
- Instrumentation Et RégulationDocument32 pagesInstrumentation Et RégulationNabilBouabana100% (2)
- Exercice Cablage API2-CorrigeDocument1 pageExercice Cablage API2-CorrigeJohn Lwis50% (2)
- L3-Capteurs Et Instrumentation-TD2Document2 pagesL3-Capteurs Et Instrumentation-TD2azdin halmi100% (1)
- Formation Capteurs Et TransmetteursDocument21 pagesFormation Capteurs Et TransmetteurssalimiyounessPas encore d'évaluation
- Cours 1 CapteurDocument10 pagesCours 1 CapteurOudjoud Keddour100% (1)
- TD N°1 Introduction À La Régulation Industrielle PDFDocument3 pagesTD N°1 Introduction À La Régulation Industrielle PDFMãl ÎkPas encore d'évaluation
- Cours Instrumentation CapteurDocument19 pagesCours Instrumentation CapteurMoussa El FatmiPas encore d'évaluation
- L'Instrumentation Et La Régulation Industrielle2Document85 pagesL'Instrumentation Et La Régulation Industrielle2Soufian RalfPas encore d'évaluation
- Automate TSX 17 Cours PDFDocument16 pagesAutomate TSX 17 Cours PDFRastate0% (1)
- CH 7 Courant Alternatif TriphaseDocument14 pagesCH 7 Courant Alternatif TriphaseJocelyn zienlet SOMDAPas encore d'évaluation
- Chapitre 1Document9 pagesChapitre 1MehdiaPas encore d'évaluation
- Régulation Industrielle-Chapitre 1-2017-BF (25 Février 2017)Document43 pagesRégulation Industrielle-Chapitre 1-2017-BF (25 Février 2017)amine milano100% (1)
- Les CapteursDocument13 pagesLes CapteursLandry NjikamPas encore d'évaluation
- Automatisme 21Document153 pagesAutomatisme 21FayeMourtalaPas encore d'évaluation
- ETUDE SYSTEMES GénéralitésDocument13 pagesETUDE SYSTEMES Généralitéschaimae sdiniPas encore d'évaluation
- PolyTech Tour Poly1 PDFDocument59 pagesPolyTech Tour Poly1 PDFChafik BouguezourPas encore d'évaluation
- Bac S Si Chaine D Information Et Chaine D EnergieDocument9 pagesBac S Si Chaine D Information Et Chaine D EnergieAmid Bahri0% (1)
- Transformateur À Semi-Conducteurs: Révolutionner le réseau électrique pour la qualité de l'électricité et l'efficacité énergétiqueD'EverandTransformateur À Semi-Conducteurs: Révolutionner le réseau électrique pour la qualité de l'électricité et l'efficacité énergétiquePas encore d'évaluation
- Demande Ou Ordre de TraDocument1 pageDemande Ou Ordre de Trarocceli nzoulouPas encore d'évaluation
- Etude Et Realisation D'un Vibreur Pour Tamis de TriDocument12 pagesEtude Et Realisation D'un Vibreur Pour Tamis de Trirocceli nzoulouPas encore d'évaluation
- Modelisation D'une Unité de Desodorisation Du Beurre de CacaoDocument61 pagesModelisation D'une Unité de Desodorisation Du Beurre de Cacaorocceli nzoulouPas encore d'évaluation
- Fiche de DecompositionDocument2 pagesFiche de Decompositionrocceli nzoulouPas encore d'évaluation
- Hydraulique ProjetDocument12 pagesHydraulique Projetrocceli nzoulou100% (1)
- Up ProDocument28 pagesUp Prorocceli nzoulouPas encore d'évaluation
- Up Pro Ravez FINALDocument30 pagesUp Pro Ravez FINALrocceli nzoulouPas encore d'évaluation
- PhaseDocument2 pagesPhaserocceli nzoulouPas encore d'évaluation
- Les Capteurs À Ultrasons Émettent Un Tissage Acoustique Compris Entre 20 Hertz Et 20 Kilohertz Et Déterminent La DistanceDocument7 pagesLes Capteurs À Ultrasons Émettent Un Tissage Acoustique Compris Entre 20 Hertz Et 20 Kilohertz Et Déterminent La Distancerocceli nzoulou100% (1)
- LOUVIHOU Ydrish DorlainDocument23 pagesLOUVIHOU Ydrish Dorlainrocceli nzoulouPas encore d'évaluation
- Bon de CommadeDocument2 pagesBon de Commaderocceli nzoulouPas encore d'évaluation
- Rapport TP SLDocument10 pagesRapport TP SLrocceli nzoulouPas encore d'évaluation
- INTRODUCTIONDocument14 pagesINTRODUCTIONrocceli nzoulouPas encore d'évaluation
- Lettre de MotivationDocument2 pagesLettre de Motivationrocceli nzoulouPas encore d'évaluation
- 94 Modele CV SimpleDocument4 pages94 Modele CV SimpleSSaanqPas encore d'évaluation
- Structure de La Distribution Électrique BTDocument6 pagesStructure de La Distribution Électrique BTrocceli nzoulouPas encore d'évaluation
- Arduino Cours Sept2018 PDFDocument111 pagesArduino Cours Sept2018 PDFyassinePas encore d'évaluation
- Types de Compresseurs D'airDocument24 pagesTypes de Compresseurs D'airrocceli nzoulouPas encore d'évaluation
- Rapport de TP Intervention ElectroniqueDocument6 pagesRapport de TP Intervention Electroniquerocceli nzoulouPas encore d'évaluation
- RapportDocument4 pagesRapportrocceli nzoulouPas encore d'évaluation
- Sujet N1Document2 pagesSujet N1rocceli nzoulouPas encore d'évaluation
- Installation ElectriqueDocument4 pagesInstallation Electriquerocceli nzoulouPas encore d'évaluation
- TP AutomatiqueDocument12 pagesTP Automatiquerocceli nzoulouPas encore d'évaluation
- MotoréducteursDocument9 pagesMotoréducteursrocceli nzoulouPas encore d'évaluation
- TP AutomatiqueDocument12 pagesTP Automatiquerocceli nzoulouPas encore d'évaluation
- Rapport de MaintenanceDocument13 pagesRapport de Maintenancerocceli nzoulouPas encore d'évaluation
- Dimension Des CoffretsDocument33 pagesDimension Des Coffretsrocceli nzoulouPas encore d'évaluation
- Rapport MetallurgieDocument14 pagesRapport Metallurgierocceli nzoulouPas encore d'évaluation
- Exposé Droit Du TravailleDocument11 pagesExposé Droit Du Travaillerocceli nzoulouPas encore d'évaluation
- Devis ElectriciteDocument2 pagesDevis ElectriciteWalter Fopa83% (6)
- 322 ElecDocument2 pages322 ElecMohamed RashedPas encore d'évaluation
- Cours de Support Physique de Transmission - ENSPT - ONOMODocument14 pagesCours de Support Physique de Transmission - ENSPT - ONOMOMatrix officielPas encore d'évaluation
- Cours HamadDocument45 pagesCours Hamadninaalice97Pas encore d'évaluation
- K01 000 05 PDFDocument788 pagesK01 000 05 PDFRida Jalale EddinePas encore d'évaluation
- Chap2 PhysiqueDocument82 pagesChap2 PhysiqueAmine TellibiPas encore d'évaluation
- 2022-2023 - DS 3-Circuits Du Premier Et Du Deuxième Ordre Et Phénomène D'interférenceDocument5 pages2022-2023 - DS 3-Circuits Du Premier Et Du Deuxième Ordre Et Phénomène D'interférencePatrick NgakouPas encore d'évaluation
- Mellah Hacene Mémoire D'ingénioratDocument11 pagesMellah Hacene Mémoire D'ingénioratjobPas encore d'évaluation
- Corrigé TD 4 Circuits Magnétiques Man 1Document16 pagesCorrigé TD 4 Circuits Magnétiques Man 1Rania Tawil100% (9)
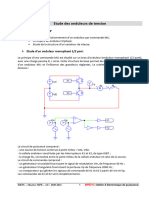
- Etude Des Onduleurs de TensionDocument5 pagesEtude Des Onduleurs de TensionNaima mecherguiPas encore d'évaluation
- Telecomunication: Etude de La Modulation Angulaire Avec MATLABDocument18 pagesTelecomunication: Etude de La Modulation Angulaire Avec MATLABdoukani anassPas encore d'évaluation
- Dossier de Recette - PT-000341Document2 pagesDossier de Recette - PT-000341Mourad Ben SaidPas encore d'évaluation
- Dossier Questions Réponses CorrigéDocument12 pagesDossier Questions Réponses Corrigéjeben.lggPas encore d'évaluation
- Méthode Diagnostic Et Réparation Circuits Électriques Et ÉlectroniquesDocument130 pagesMéthode Diagnostic Et Réparation Circuits Électriques Et ÉlectroniquesKamyl AzariPas encore d'évaluation
- Presentation CalculateurDocument38 pagesPresentation Calculateurolrin100% (1)
- EXAMEN GENERATEUR CorrigéDocument5 pagesEXAMEN GENERATEUR CorrigéSanto Santo100% (1)
- Thème Étude Et Simulation Et Réalisation D'un Chargeur de Pile Sans FileDocument44 pagesThème Étude Et Simulation Et Réalisation D'un Chargeur de Pile Sans FileWassim Ben mohammedPas encore d'évaluation
- Debuter Dans L Informatique Embarquee Avec TeensyDocument17 pagesDebuter Dans L Informatique Embarquee Avec TeensyrotocopicopPas encore d'évaluation
- Transistor Bipolaire Chapitre 1Document39 pagesTransistor Bipolaire Chapitre 1zinebazeroual163Pas encore d'évaluation
- Machines ÉlectriquesDocument2 pagesMachines ÉlectriquesKalosoiretrotchgmail.com Kaloso100% (1)
- Communication Nummérique 3 PDFDocument27 pagesCommunication Nummérique 3 PDFMustapha HakimPas encore d'évaluation
- Fours À Arc: Maurice KRATZDocument18 pagesFours À Arc: Maurice KRATZbalotelli balotelliPas encore d'évaluation
- Fabriquez Un Générateur À Énergie LibreDocument3 pagesFabriquez Un Générateur À Énergie Libretieusk.contactPas encore d'évaluation
- Physique C Juin2023Document2 pagesPhysique C Juin2023houakeukamguiabrandonjoresPas encore d'évaluation
- Chapitre 4 Etude Et Programmation de lAPI S7 200Document27 pagesChapitre 4 Etude Et Programmation de lAPI S7 200Cherdouh RabahPas encore d'évaluation
- Opérateurs Électromécaniques À 24Vcc Pour Portes de Garages Sectionelles Et Basculantes À Ressorts Ou Contrepoids À Usage RésidentielDocument16 pagesOpérateurs Électromécaniques À 24Vcc Pour Portes de Garages Sectionelles Et Basculantes À Ressorts Ou Contrepoids À Usage RésidentielderbalijalelPas encore d'évaluation
- T90/T110/T130/T150 Testeurs de Tension Et de ContinuitéDocument4 pagesT90/T110/T130/T150 Testeurs de Tension Et de ContinuitéGuillaume FoubertPas encore d'évaluation
- RAY01Document7 pagesRAY01oumayma khlifiPas encore d'évaluation
- Abbouna YacineDocument82 pagesAbbouna YacineFarid BakaPas encore d'évaluation
- Correction Travaux Diriges Mesure 04 PDFDocument4 pagesCorrection Travaux Diriges Mesure 04 PDFtagne simo rodrigue100% (1)