Académique Documents
Professionnel Documents
Culture Documents
Chapitre Tois 23
Transféré par
Raniya TebbalCopyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Chapitre Tois 23
Transféré par
Raniya TebbalDroits d'auteur :
Formats disponibles
Cours Tribologie Prof. BOUCHERIT H.
Chapitre trois
Chapitre Deux
Équations générales de la lubrification par un fluide
newtonien piézovisqueux et barotrope
1- Introduction
La lubrification est la partie la plus importante de la tribologie qui concerne tous
les contacts pour lesquels un fluide lubrifiant appelé troisième corps est intercalé
entre deux corps solides en mouvement relatif (figure III-1). Elle joue un rôle
important partout où des surfaces sont en mouvement relatif les unes par rapport
aux autres. Tous les systèmes mécaniques comportent plus ou moins des éléments
lubrifiés. Le but de la lubrification est de diminuer les frottements, en limitant
l'usure et en améliorant le rendement, c'est-à-dire que l’on cherche plus de
puissance et moins de consommation, c’est la fonction la plus évidente des fluides
lubrifiants. Un film de fluide visqueux sépare les deux surfaces en mouvement
relatif d’un mécanisme ; il s’agit de calculer :
- la charge (W) que peut supporter le contact ;
- la force de frottement ou le couple de frottement ;
- le débit de fluide dans le mécanisme ;
- la puissance dissipée dans le contact ;
Ainsi, il faut déterminer le champ de pression dans le film fluide lubrifiant. La
connaissance de la répartition de la pression du film permet de calculer les performances
statiques ou dynamiques du système par exemple arbre et coussinet d’un palier
hydrodynamique, tels que la portance hydrodynamique, la puissance dissipée, le champ
des vitesses moyennes de l'écoulement ainsi que le débit de fuite à l’extrémité du palier.
La pression peut être créée par une pompe extérieure au contact c’est la
lubrification hydrostatique : c’est le cas par exemple de certains paliers et
glissement de certaines machines-outils.
La pression peut être créée par le déplacement relatif des surfaces, c’est la
lubrification hydrodynamique : cela concerne les butés, les paliers fluides, les joints
d’étanchéités.
Fluide
Fig. III-1: Schéma du contact lubrifié
Chapitre Trois : Equations de base de la Lubrification 38
Cours Tribologie Prof. BOUCHERIT H.
2- Equations de base de la lubrification par fluide newtonien piezovisqueux et
barotrope
Les équations générales de la lubrification permettent compte tenu des conditions
géométriques et cinématiques de déterminer les caractéristiques d’un écoulement
en film mince et en particulier sa portance (figure II-1). Elles sont déduites des
équations de la mécanique des milieux continus appliquées aux fluides newtoniens.
Les équations qui décrivent le comportement d’un fluide compressible sont établies
à partir de :
- lois de conservation de la masse ou équation de continuité ;
- lois de conservation de la quantité de mouvement (lois fondamentale de la
dynamique) ;
- la loi de conservation de l’énergie (1ère principe de la thermodynamique)
2-1. Equation de conservation de la masse
La loi fondamentale de la mécanique classique concernant la conservation de la
masse traduit le fait que la masse d’un système matériel que l’on suit dans son
mouvement reste constante. Cette équation peut être décrite par sa forme
différentielle suivante :
u i 0 (III-1)
t x i
i=1÷3
Avec, ρ est la masse volumique de fluide et ui composantes du vecteur vitesse
d’une particule fluide.
Pour un fluide incompressible, la masse volumique reste constante, l’équation de
continuité (Eq-III-1) devient :
u i 0 (III-2)
x i
2-2. Equation de conservation de la quantité de mouvement
L’équation générale de conservation de la quantité de mouvement de fluide est
donnée par :
du i σ ij
ρ ρf i (III-3)
dt x j
i, j = 1 ÷ 3
du i u i u
Avec, u j i (la dérivée totale qui représente l’accélération d’une particule
dt t x j
fluide située en point M)
: tenseur de contraintes au point M
fi : forces massiques
ρ.fi : forces volumiques
La loi de comportement rhéologique pour un fluide newtonien, qui lie le tenseur de
contraintes au tenseur de taux de déformation s’écrit :
σ ij p λδ ij 2ij (III-4)
Chapitre Trois : Equations de base de la Lubrification 39
Cours Tribologie Prof. BOUCHERIT H.
Avec,
p : pression dans le fluide
: tenseur de déformation, ij u i , j u j,i / 2
θ : taux de dilation cubique, θ kk
: symbole de Kronecker
λ et µ : coefficients de Navier
Pour un fluide incompressible (θ = 0), le second coefficient de viscosité λ n’intervient
plus.
2-3. Loi de conservation de l’énergie
Pour un fluide newtonien l’équation de conservation l’énergie est :
de q j
ρ - +ρ (III-5)
dt x j
Où, e(T, ρ) : énergie interne massique (de = Cp dT, et Cp est la chaleur massique
ou capacité calorifique de fluide à pression constante)
e ρ : énergie interne par unité de volume
r : source interne (rayonnement où réaction chimique)
T
qj : flux de chaleur (qj = - k est loi de Fourier)
x j
K : coefficient de conductivité thermique
T : température de fluide
- Equation de la chaleur dans les massifs ou solides (surfaces de contact) :
L’équation de la chaleur ou équation de Fourier dans le solide s’écrit sous la forme
générale suivante :
K ij T C v T u j T (III-6)
x i
x j x j
t
Cv : chaleur massique ou capacité calorifique de solide
Kij : tenseur symétrique de conductivité thermique du milieu
Si, on considère que les matériaux constituant les solides isotropes : Kij = k δij
Où, k est la conductivité thermique de matériau.
Si, on suppose que K, ρ et Cv sont indépendants de la température, l’équation de
Fourier devient :
1 T
T( x, y, z) (III-7)
a t
k
Avec, a est la diffusivité thermique ( a en m2 /s)
C v
(Opération de la place)
En régime permanant, l’équation de Fourier prend la forme suivante : T = 0
2-4. Equations de Navier-Stokes ou équations du mouvement d’un fluide newtonien
piézovisqueux et barotrope
Chapitre Trois : Equations de base de la Lubrification 40
Cours Tribologie Prof. BOUCHERIT H.
Si, en reportant l’équation du comportement rhéologique (III-4) dans l’équation de
mouvement (III-3), on obtient les équations de Navier-Stokes ou équations du
mouvement pour un fluide newtonien :
du i p 2ui 2u j u i u j
f i
dt x i x x x i x j x x x i
j j j j
(III-8)
2u j u j
x i x j x j x i
Avec, i et j = 1 ÷ 3
Dans ces relations, i correspond à la direction considérée et j joue le rôle d’indice somme.
- Par exemple pour la direction, i = 1, les équations de Navier-Stokes (III-3)
deviennent :
( ) (
) (
) ( ) ( ) ( ) (III-9)
En mécanique des films minces visqueux, les équations de Navier (III-8) se simplifient
très sensiblement car l’épaisseur du film suivant o, x 2 est très faible par rapport aux
deux autres dimensions de contact (figure III-2).
Pour mettre en évidence les termes prépondérants (importants), il est commode d’écrire
ces équations (III-8) sous forme adimensionnée.
Fig.III-2 : Schéma général d’un contact hydrodynamique
~ x2 ~ x u
x1 1 , x 2 , ~
x
Pour cela, on pose : ~ , x3 3 , ~
t
tV u1 1 , ~
u2
u 2L
,
L h L L V Vh
u ~
~
u3 3 ,
~ , ~
et
V 0 0 0
Chapitre Trois : Equations de base de la Lubrification 41
Cours Tribologie Prof. BOUCHERIT H.
Dans ces expressions L et V sont respectivement la dimension et la vitesse
L
, celles suivant o, x 2 ,
Vh
caractéristiques selon les axes ( o, x 1 ) et ( o, x 3 ), h et est
L V
l’ordre de grandeur du temps.
μ0 et λ0 sont constantes de Navier et ρ0 est la masse volumique de référence à T = T0.
ph 2
Ce changement de variable conduit à poser que : ~
p
0 VL
On remarque que la vitesse caractéristique (V) peut être définie de plusieurs façons, en
hydrodynamique, V sera la vitesse de l’une des parois du contact.
Si les parois du contact sont immobiles, le contact est hydrostatique, on définit alors la
pression sans dimension par,
~
p p / ps où ps est par exemple la pression
2
d’alimentation et la vitesse caractéristique peut alors s’écrire : V = p s h
0L s
On remplace ces expressions dans l’équation III-9, (direction, i = 1) et en négligeant les
forces de volume ( , elle devient :
̃ ̃ ̃ ̃ ̃ ̃
̃ ( ̃ ̃ ) ̃(
̃ ̃ ̃ ̃
̃ ̃ ̃ ̃ ̃ ̃ ̃ ̃
)
̃ ̃ ̃ ̃ ̃ ̃ ̃ ̃ ̃
̃ ̃ ̃ ̃ ̃
̃( )
̃ ̃ ̃ ̃ ̃ ̃ ̃ ̃
̃ ̃ ̃ ̃ ̃ ̃ ̃
( ) ( ) ( ) (III-10)
̃ ̃ ̃ ̃ ̃ ̃ ̃
D’où, on obtient ainsi :
̃ ̃ ̃ ̃
̃ ( ̃ ̃ ̃ )
̃ ̃ ̃ ̃
̃ ̃
̃( )
̃ ̃ ̃ ̃ ̃ ̃
̃ ̃ ̃ ̃ ̃ ̃
̃ ̃ ̃ ̃ ̃ ̃
̃ ̃ ̃ ̃ ̃
̃( )
̃ ̃ ̃ ̃ ̃ ̃ ̃
̃ ̃ ̃ ̃ ̃
+ ̃( ) ( ) +
̃ ̃ ̃ ̃ ̃
̃ ̃ ̃ ̃ ̃ ̃
( ) ( ) (III-11)
̃ ̃ ̃ ̃ ̃ ̃
On multiple tous les termes de l’équation précédente (III-11) par ( ), on obtient :
̃ ̃ ̃ ̃
( ) (̃ )( ̃
̃ ) ( )( ) ( )( )̃(
̃ ̃ ̃ ̃
̃ ̃ ̃ ̃ ̃ ̃ ̃
) ( )( ) ( ) ( )( )̃(
̃ ̃ ̃ ̃ ̃ ̃ ̃ ̃
Chapitre Trois : Equations de base de la Lubrification 42
Cours Tribologie Prof. BOUCHERIT H.
̃ ̃ ̃ ̃ ̃
) ( )( )̃( ) ( )( )
̃ ̃ ̃ ̃ ̃ ̃ ̃
̃ ̃ ̃ ̃ ̃ ̃
( )( ) ( )( ) ( )( )
̃ ̃ ̃ ̃ ̃ ̃
̃
( )( ) (III-12)
̃ ̃
Si, on suppose que, (paramètre d’échelle en mécanique des film minces visqueux
de l’ordre ) et (nombre de Reynolds relatif à l’épaisseur), alors , l’équation
III-12 devient :
̃ ̃ ̃ ̃ ̃ ̃ ̃
- ̃( ̃ ) ̃( ) ( ) ( ) ̃( )
̃ ̅̅̅̅̅̅̅̅̅
̃ ̃ ̃ ̃ ̃ ̃
̃ ̃ ̃ ̃ ̃ ̃
̃( ̃ ̃
) ̃( ̃
) ̃ ̃ ̃ ̃
̃ ̃ ̃ ̃ ̃
(III-13)
̃ ̃ ̃ ̃ ̃ ̃ ̃
ph 2
Ce changement de variables conduit à poser que, ~
p , ainsi l’équation III-13
0 VL
s’écrit sous forme suivante :
~ ~ u1 ~ ~ 0 ~
~ u j ~ 2 ~ u1 2 ~ u1 ~ 2 ~
p
R ~
u~1 ~ u
u
~ 21
~
x1 ~ ~ ~ ~ ~ 2
t x j 0 x 1 x j x 1 x 3 x 2
j
2
~ ~ (III-14)
2 0
u j ~ ~ u1 ~ ~ u1 ~ u 3 ~ ~ u1 ~
2 u 2
~
~ ~ 2 ~ x 1 ~
x 1 ~ x 3 ~
x 3 ~
x 1 ~ x 2 ~
0 x 1 x j x2 x 1
- Pour la direction, i = 2, les équations de Navier-stockes (III-8) deviennent :
( ) ( )
( ) (III-15)
Alors, pour j = 1 ÷ 3, l’équation III-15, devient :
( ) (
) ( )
( ) ( ) ( ) ( ) (III-16)
En variables sans dimensions, cette équation devient :
̃
̃ ( )
̃ ̃ ̃ ̃
Chapitre Trois : Equations de base de la Lubrification 43
Cours Tribologie Prof. BOUCHERIT H.
̃( )
̃ ̃ ̃ ̃ ̃
̃( )
̃ ̃ ̃ ̃ ̃ ̃ ̃ ̃
̃ ̃ ̃
( ) ( )
̃ ̃ ̃ ̃ ̃ ̃ ̃
̃ ̃
( ) ( ) (III-17)
̃ ̃ ̃ ̃ ̃ ̃
On multiple tous les termes de l’équation (III-17) par le terme , on aura alors :
( )( )̃( ̃ ) ( )( )
̃ ̃ ̃ ̃ ̃
( )( )̃( ) ( )( )( )̃
̃ ̃ ̃ ̃ ̃ ̃ ̃
̃
( )( )̃( ) ( )( ) ( ̃
̃ ̃ ̃ ̃ ̃ ̃ ̃
̃ ̃
) ( )( ) ( ) ( )( ) ( )
̃ ̃ ̃ ̃ ̃ ̃ ̃ ̃
̃ ̃
( )( )( ) ̅̃
( )( )( ) ̅̃ (III-18)
̃ ̃
ph 2
avec, R = et ~
p , alors, l’équation III-18 s’écrit :
0 VL
̃ ̃ ̃ ̃ ̃
- ̃( ̃ ) ( )̃( ) ̃( )
̅ ̅ ̅ ̅ ̅
̃ ̃ ̃ ̃ ̃ ̃ ̃
̃( ) ̃ ( ) ( )
̅ ̅ ̃ ̃ ̃ ̃ ̃ ̃ ̃
̃ ̃ ̃ ̃ ̃ ̃ ̃
( ) (III-19)
̃ ̃ ̃ ̃ ̃ ̃ ̃
Ainsi, l’équation III-14, on peut l’écrire sous forme suivante :
~ ~ u 2 ~ ~ u 2 ~ 2 ~ u2 2~u 2 ~ ~ 0 ~ u j ~ 2~
2
p
R ~
u
u 2
~
x 2 ~ ~ ~ ~ 2
0 x 2 x j
~ ~ ~
t x j x 1 x 3
j
2
x 22
~ (III-20)
0 ~ uj
2 ~ ~ u ~ ~ u ~
u ~ ~
u ~
u
2
1 2 ~2 ~ ~ 3 2 ~ 2
0 ~x 2 ~
x j ~x 2 ~x 2 ~ x 1 ~
x2 x 1 x 3 x 2 x 3
Pour la direction, i = 3, la même démarche, dans ce cas les équations III-8 s’écrivent :
Chapitre Trois : Equations de base de la Lubrification 44
Cours Tribologie Prof. BOUCHERIT H.
~ ~ u 3 ~ ~ 0 ~
~ u j ~ 2 ~ u 3 ~ 2 ~
u3 2~
p
R ~
u~3 ~ u
u
~ 23
~
x 3 t x j
~
0 x 3 x j
~ ~ ~ ~
x 1 x 3 x 2
j
2 2
~ ~ (III-21)
2 0
u ~ ~ ~ ~ ~ ~ ~ ~
j 2 u 3 u 3 u1 u 3 2 u 2
~ ~
0 x 3 x j ~x 3 ~x 3 ~ x 1 ~
x1 ~ x 3 ~ x 2 ~
x2 ~ x 3
Finalement, compte tenu de ces changements de variables et en négligeant les forces
volumiques, les équations de Navier-Stokes pour les trois directions (i =1 , i =2 et i =3)
en variables sans dimensions sont (III-14 , III-20 et III-21) :
~ ~ u
~ ~ ~ 0 ~ u ~ u 1 u 1
2~ 2~ 2~
~
p
R~
u
~1 ~ u j ~1 ~ ~ j ~ u1
t x j 0 x 1 x j ~ x 32
~ ~
x 1
2
x1 x 22
~ ~
u ~ ~ ~ ~ ~ ~ ~ ~
2 0
j 2 u 1 u 1 u 3 u 1 2 u 2
~ ~
0 x 1 x j ~x 1 ~x 1 ~ x 3 ~x 3 ~ x 1 ~ x 2 ~x2 ~x 1
~ ~ ~ u ~ u 2 u 2 ~ 0 ~ u j ~ 2~
2~ 2~
p u u22
~ 2 R ~ ~2 ~ u j ~ 2 2
~
t ~ ~ 0 x 2 x j
~ ~ ~
x 2
x j x 1 x 3
2
x2
~
0 ~ uj ~ ~ ~ ~ ~ ~ ~
2 u 2 u 1 2 u 2 u 3 2 u 2
~
0 ~ x 2 ~
x j ~
x 2 ~ x 2 ~ x 1 ~x2 ~x 1 ~ x 3 ~
x2 ~x 3
~
p ~u ~u ~ ~ 0 u j ~
~ u 3 u 3
2 ~ 2 ~ 2~
~ u3
R~ ~3 ~ u j ~ 3 ~ ~ ~
~
x
t
x j 0 x 3 x j x1
2
~x 32 ~x 22
3
~ ~
u ~ ~
u ~ ~ u u
~ ~ ~ u ~u
2 0 ~ ~ j 2 ~ ~ 3 ~ ~ 3 ~ 1 ~ ~ 3 2 ~ 2 (III 22)
0 x 3 x j x 3 x 3 x 1 x 1 x 3 x 2 x 2 x 3
Avec, j = 1,2, 3
VH
Où, 0 est le nombre sans dimension de Reynolds relatif à l’épaisseur de
0
l’écoulement représente le rapport des forces d’inertie aux forces de viscosité exercées sur
une particule fluide et h / L est paramètre d’échelle, en mécanique des films minces
visqueux (en lubrification) est de l’ordre de 10-3.
Si, en négligeant les termes multipliés soit par 2 , soit par 3 , les équations de Navier
(III-22) se réduisent à :
~ p ~
u ~u ~ 2~ ui ~
u i ~
~ ~ ~i ~ u j ~i .
x i t
x j
~x2 2
~x 2 ~x2
~ (III-23)
p ~ ~ ~ ~
0 p p ( x , x )
~
x 2
1 3
Avec, i = 1 et 3
Les termes en ou termes d’inertie de l’équation III-23 seront négligeables
devant les termes de viscosité quand : <<1 ; ce qui est souvent vérifié dans la
plus part des écoulements rencontrés en lubrification.
Chapitre Trois : Equations de base de la Lubrification 45
Cours Tribologie Prof. BOUCHERIT H.
En effet, dans le cas du coussinet d’une bille sur un plan par exemple (représentatif du
roulement à bille ou de l’engrenage), on a : L = 10-3 m, h = 10-6 m, V = 10 m/s, μ0 =
0.05Pa.s et ρ0 = 900 kg/m3, qui donne, 1,8 10
4
Dans le cas d’un palier lubrifié par une huile de dimensions moyennes, on a :
L = 0.5 m, h = 10-4 m, V = 30 m/s, μ0 = 0.05Pa.s, ρ0 = 900 kg/m3, qui donne,
1,08 102
Des exceptions se rencontrent toutefois quand la viscosité du fluide est faible, l’épaisseur
du film est importante ou pour les paliers de grandes dimensions. Ainsi pour le palier
précédant mais lubrifié par l’eau à 20°C, on aura :
μ0 = 1mPa.s et ρ0 = 1000 kg/m3, 0.6
De même pour les paliers de grandes dimensions telles que ceux supportant les lignes
d’arbre des centrales électriques modernes : L = 0.5m, h = 10-3m, V = 100m/s μ0 =
0.05Pa.s, ρ0 = 900 kg/m3, qui donne : 3,6
Si, par hypothèse, on néglige les forces d’inertie l’équation III-23, elle devient comme suit
:
~
p ~ ~
u
~ ~ ~ i
x i x 2 x 2
~
p 0 (III-24)
~
x 2
i = 1 et 3
Et en revenant aux variables dimensionnées, l’équation III-24 donne :
p u 1
x
x 1 x 2 2
p
0 (III-25)
x 2
p u 3
x
x 3 x 2 2
D’après le système d’équations précédant, la pression varie en fonction que de x et z, (p
= p(x, z)). Ce sont les équations de Navier écrites dans le cadre de la théorie de
lubrification. Ces équations auxquelles s’ajoute l’équation de la conservation de la masse
et les conditions aux limites et après intégration, permettent formellement de connaître
le champ de vitesses u1 et u3 (u2 << u1 et u3 : écoulement bidimensionnel de lubrifiant
dans la direction ( o, x 1 ) et ( o, x 3 )), la pression et les contraintes de cisaillement dans le
film lubrifiant.
2-4-1. Détermination du champ de vitesses d’écoulement de fluide
Lorsque la vitesse de paroi du contact est tangente en tous points à cette paroi,
l’équation de la mécanique des films minces visqueux généralisés se simplifie car en
plaçant l’origine du système d’axes sur cette paroi (figure III-3), on pose :
h1 = 0 et h2 = h(x, z, t)
Chapitre Trois : Equations de base de la Lubrification 46
Cours Tribologie Prof. BOUCHERIT H.
Définition des hypothèses et des conditions aux limites sur les vitesses :
- Surface du contact lisse ;
- Fluide adhère parfaitement aux parois (vitesse de glissement négligeable) ;
- On suppose que la paroi inférieur (S1) est plane et confondue avec le plan (x 1, O, x3)
du référentiel ;
- Vitesse en tous points de la surface (S1) est tangente à cette surface.
Fig.III-3 : Géométrie et cinématique d’un contact hydrodynamique
Pour un écoulement bidimensionnel (2D) en film mince visqueux (figure III-3), les
équations de Navier (Eq-III-25) s’écrivent :
p u 1
x 1 x 2 x 2
(III-26)
p u 3
x 3 x 2 x 2
Pour obtenir le champ de vitesse, il faut intégrer deux fois ces équations par rapport à la
variable x2.
- Première intégration par rapport à x2 et si, μ est indépendante de x2, on obtient :
p u 1
x 2 A( x 1 , x 3 )
x 1 x 2
p u 3
x 2 B( x 1 , x 3 )
x 3
x2
Ou encore :
u 1 1 p A( x 1 , x 3 )
x2
x 2 x 1
u 1 p B( x , x3 ) (III-27)
3
x2 1
x 2 x 3
- Deuxième intégration par rapport à x2 :
p
x2 dx 2
u1 ( x 2 ) dx 2 A ( x 1 , x 3 ) C( x 1 , x 3 )
x 1
p
)
x dx
u 3 ( x 2 ) 2
dx 2 B( x 1 , x 3 2
D( x 1 , x 3 )
x 3
Soit :
Chapitre Trois : Equations de base de la Lubrification 47
Cours Tribologie Prof. BOUCHERIT H.
1 p A
u1 (x 2 ) x 22 x2 C
2 x 1
1 p B (III-28)
u 3 ( x 2 ) x 22 x2 D
2 x 3
Pour déterminer les constantes A, B, C et D en utilise les conditions aux limites sur les
vitesses suivantes, d’après la figure III-3, les conditions aux limites sur les vitesses sont :
pour x 2 0, u 1 U1(1) , u 2 U (21) 0, u 3 U 3(1)
(III-29)
pour x 2 h, u 1 U1 , u 2 U 2 , u 3 U 3
( 2) ( 2) ( 2)
En remplaçant ces conditions aux limites sur les vitesses dans les expressions Eq-III-
28, on obtient :
( 2) 1 p 2
A U 1 U 1
(1)
h
h 2 x1
( 2) 1 p 2
B U 3 U 3
(1)
h
h 2 x 3
C U1(1)
D U 3(1)
En remplaçant les constantes A, B, C et D par leurs valeurs, les deux composantes de
vecteur vitesse d’écoulement s’expriment comme suit :
1 p x x
u1 (x 2 ) ( x 22 x 2 h ) 2 U1( 2 ) U1(1) (1 2 )
2 x 1 h h
1 p x x (III-30)
u 3 ( x 2 ) ( x 22 x 2 h ) 2 U 3( 2 ) U 3(1) (1 2 )
2 x 3 h h
Les premiers termes des deux équations de vitesses, représentent l’écoulement de
Poiseuille (dû au gradient de pression) et les seconds termes représentent l’écoulement
de Couette (dû au déplacement de parois).
2-4-2. Expression des tenseurs des contraintes et de taux de déformations
Dans le cas d’un fluide newtonien le tenseur de contrainte est symétrique et la matrice
représentative de ce tenseur s’écrie en un point M (figure III-3) :
11 12 13
(M) 22 23
(III-31)
Sym 33
On a en lubrification :
u 1 u 3 2 u1 2u 3 2u 3 2u 3
x 1 x 1 x 12 x 12 x 32 x 12
, , 2 , 2 et 2 , 2
u 1 u 3 2 u1 2u 3 2u 3 2u 3
x 2 x 2 x 22 x 22 x 22 x 22
En prenant en considération ces hypothèses, la loi de comportement rhéologique III-4 se
réduit à :
Chapitre Trois : Equations de base de la Lubrification 48
Cours Tribologie Prof. BOUCHERIT H.
1
0 u 1, 2 0
1 1 1 2 1 3 1 0 0
2
22 2 3 p
1 0 2 0
1
u 1, 2
2
Sym 3 3 Sym 1 Sym 0
σ ij p λδ ij 2 ij
Avec,
Soit encore :
p u1, 2 0
( M) p u 3, 2 (III-32)
Sym p
Le taux de déformation :
1 u 1
0 2 x 2
0
1 u 3
( M ) 0 (III-33)
2 x 2
Sym 0
Le fluide étant newtonien, les champs de contraintes de cisaillement dans le fluide
s’expriment par :
u 1
1 2 2 1
x 2
u 3 (III-34)
2 3 3 2
x 2
En remplaçant u1 et u3 par leurs expressions (III-34), on obtient le champ de contraintes
exercées par le fluide sur les parois :
1 p
1 2 (2x 2 h ) ( U1( 2 ) U1(1) )
2 x 1 h
1 p (III-35)
2 3 (2x 2 h ) ( U 3( 2 ) U 3(1) )
2 x 3
h
Changement de notation : Dans ce qui suit, on adoptera la nouvelle notation pour les
variables d’espace et les composants de vitesses d’écoulement comme suit (figure III-4):
(x, y, z) au lieu de (x1, x2, x3)
(u, v, w) au lieu de (u1, u2, u3)
(U1, V1, W1) au lieu de (U 1(1), U2(1), U3(1)) (III-36)
(U2, V2, W2) au lieu de (U 1(2), U2(2), U3(2))
Chapitre Trois : Equations de base de la Lubrification 49
Cours Tribologie Prof. BOUCHERIT H.
Fig.III-4 : système d’axe
Les composantes de vecteur vitesse d’écoulement (-III-30) deviennent :
1 p y y
u ( y) ( y 2 yh) U 2 U1 (1 )
2 x h h
1 p y y (III-37)
w ( y) ( y 2 yh) W2 W1 (1 )
2 z h h
Les contraintes de cisaillement dans le fluide lubrifiant deviennent aussi :
1 p
x y x y 2 x ( 2 y h ) h ( U 2 U1 )
1 p (III-38)
y z y z (2 y h ) ( W2 W1 )
2 z h
3- Dérivation de l’équation de base de la lubrification pour un fluide
newtonien : Equation de Reynolds
3-1. Hypothèses de la théorie de Reynolds
La dérivation de l’équation de Reynolds nécessite l’emploi des hypothèses suivantes :
- le milieu est continu : l’équation de Reynolds ne s’applique pas dans les zones où il y a
rupture du film ;
- l’épaisseur du film est très faible devant la largeur et la longueur du contact, le
rapport entre ces grandeurs doit être de l’ordre de 10-3. C’est l’hypothèse fondamentale
de la lubrification hydrodynamique, si cette hypothèse n’est pas vérifiée, l’équation de
Reynolds ne peut être s’appliquée ;
- l’écoulement est laminaire, en régime non laminaire il faudra utiliser une autre
modélisation ;
- les forces massiques extérieures dans le fluide sont négligeables ;
- les forces d’inertie dans le fluide (résistance des particules au mouvement,
proportionnelle à leur masse) sont négligeables devant les forces de viscosité et de
pression ;
- Il n’y a pas de glissement entre le fluide et les parois du contact, ainsi sur les parois, la
vitesse du fluide est égale à celle des parois ;
- la courbure générale du film est négligée, on peut démontrer qu’en film mince dans un
palier par exemple, l’effet de courbure est du second ordre ;
Chapitre Trois : Equations de base de la Lubrification 50
Cours Tribologie Prof. BOUCHERIT H.
- la vitesse d’une des parois du contact est toujours tangente à cette paroi : ce qui permet
de placer le système d’axe (o, x, z) sur la paroi (S1) où H1 = 0 et H2 = h(x, y, t) (figure
III-4).
- la viscosité et la masse volumique du fluide ne varient pas à travers l’épaisseur de film.
3-1. Dérivation de l’équation de Reynolds
Pour un fluide newtonien, à partir de l’équation de continuité III-1, on a :
u v w 0 (III-34)
t x y z
L’intégration de cette équation à travers l’épaisseur de film, h(x, z) :
h x ,z
t x u y v z w dy 0
0
(III-35)
h ( x ,z ) h ( x ,z ) h ( x ,z ) h ( x ,z )
Où , 0
t
dy 0
(u )dy
x
0
y
(v)dy
0
(w )dy 0
z
I1 I2 I3
soit,
h ( x ,z )
I1 I 2 I3 0
0
t
dy + (III-36)
Avec,
h ( x ,z )
I1
0
x
(u )dy
h ( x ,z )
I2
0
y
(v)dy (III-37)
h ( x ,z )
3
I
0
z
(w )dy
Notons, en régime isotherme on a : p = p(x, z, t), ρ = ρ(p) et µ = µ(p)
Il vient alors, µ = µ(x, z, t) et ρ = ρ (x, z, t)
h ( x ,z ) h ( x ,z )
0
t
dy =
t dy = h t
0
I 2 v0 v(h) v(0) v 2 v1 v 2
h
Pour, I1 et I3 sont des intégrales difficiles à calculer, pour les déterminer en utilisant le
théorème de Leibnitz :
Chapitre Trois : Equations de base de la Lubrification 51
Cours Tribologie Prof. BOUCHERIT H.
h 2 x ,z , t h2
h h
f (x, y, z, t )dy f x, y, z, t dy f x, h 2 , z, t 2 f x, h1 , z, t 1
h ( x ,z ,t )
x x h x x
1 1
Les intégrales I1 et I3 deviennent alors :
u ( y) dy u (h ) h
h
I1
x 0 x
(III-38)
I 3 w ( y) dy w ( h ) h
h
z 0 z
Avec, U(h) = U2 , W(h) = W2 et U(0) = W(0) = 0 (conditions limites sur les parois du
contact)
Comme la variation de la masse volumique (ρ) à travers l’épaisseur du film n’est pas
importante, l’équation III-38 devient :
Q x h
I1 U 2
x x
dh (III-39)
I 2 V2
dt
I Q z w h
3 z 2
z
Ainsi,
h
x
Q U ( y) dy
0
h
Q w ( y) dy
z
0
dh h h h
et, U2 W2
dt t x z
Avec, Qx et Qz sont les débits massiques par unité de longueur suivant les directions x et
z.
On intègre Qx et Qz selon l’épaisseur de film, on obtient :
h 3 p h
Q x U 2 U1
12 x 2
(III-40)
3
W2 W1
Q h p h
12 z 2
z
Avec ces expressions, l’équation III-36, alors devient :
Qx Qz h h
U 2 W2 V2 h (III-41)
x z x z t
En remplaçant V2 , Qx et Qz par leurs expressions, l’équation précédente devient :
h 3 p h 3 p 1
h(U1 U 2 ) 1 h(W1 W2 ) (h) (III-42)
x 12 x z 12 z 2 x 2 z t
Cette équation III-42, est l’équation de base de la lubrification ou de la mécanique de
film mince visqueux pour un fluide newtonien en régime isotherme (T=ct.).
Chapitre Trois : Equations de base de la Lubrification 52
Cours Tribologie Prof. BOUCHERIT H.
C’est l’équation de Reynolds écrite pour un écoulement bidimensionnel (2D) en régime
isotherme ; c’est une équation aux dérivées partielles du second ordre de type elliptique,
qui n’admet généralement pas des solutions analytiques sauf dans des cars où la
simplifier.
Le second membre de l’équation générale de Reynolds III-42 correspond à deux effets
qui sont :
1
h(U1 U 2 ) 1 h(W1 W2 ) : Effet d’entraînement
2 x 2 z
h : Effet d’écrasement
t
Généralement en lubrification hydrodynamique, les fluides lubrifiants sont des
fluides considérés comme incompressibles; c.-à-d. la masse volumique de
lubrifiant reste constante en fonction de pression (la masse volumique varie
très peu en fonction de la pression dans le film lubrifiant : (p) cte. ). Dans ce
cas l’équation de Reynolds III-42 , pour un fluide Newtonien devient :
h 3 p h 3 p 1
h(U1 U2 ) 1 h(W1 W2 ) h (III-43)
x 12 x z 12 z 2 x 2 z t
L’équation de Reynolds est assez générale, elle s’applique à différent lubrifiants et à
différents types de contact, on peut distinguer :
- fluide compressible ou fluide incompressible ;
- fluide de viscosité variable et fluide de viscosité non variable; il faut noter que pour un
fluide de viscosité variable, la viscosité ne varie pas à travers l’épaisseur de film ;
- régime transitoire et régime laminaire : on définit en mécanique des film minces
visqueux le régime permanent comme un régime de fonctionnement tel que dans un
repère particulier, mobile ou non, les vitesses des parois et les paramètres géométriques
du contact sont indépendants du temps. L’équation de Reynolds permet de différencier
ces deux régimes : en régime permanent le terme (h ) est nul et les vitesses et les
t
dimensions du contact sont un repère particulier indépendant du temps.
- contact hydrodynamique et contact hydrostatique : la terminologie étant assez
imprécise nous conviendrons d’appeler contacts hydrostatique les seuls contacts pour
lesquels l’équation de Reynolds se réduit à :
h 3 p h 3 p
0 (III-44)
x x z z
En coordonnées cylindrique (figure III-5), une démarche analogue permet d’obtenir
l’équation de Reynolds.
Dans ce système d’axes (O, r, θ, z), les vitesses du fluide sur les parois du contact
s’écrivent :
Chapitre Trois : Equations de base de la Lubrification 53
Cours Tribologie Prof. BOUCHERIT H.
pour z 0, u U1 v V1 et w0
(III-45)
pour z h, u 1 U 2 v V2 et w W2
Fig.III-5 : Système d'axes en coordonnées cylindriques
L’équation de Reynolds en coordonnées cylindrique est donnée par :
rh 3 p h 3 p h h
6r ( U1 U 2 ) 6r (V1 V2 ) 6rh U1 U 2
r r r r r
(III-46)
6h V1 V2 6h ( U1 U 2 ) 12rW2 12rh
t
En coordonnées cartésiennes : U1 – U2 et W1 – W2 respectivement selon x et z
En coordonnées cylindriques : U1 – U2 et V1 – V2 respectivement selon θ et r.
Les composantes de la vitesse d’une particule fluide dans le film s’écrivent :
1 p hz z
u z(z h ) U1 U 2
2 r h h
(III-47)
v 1 p hz z
z(z h ) V1 V2
2r h h
Les contraintes de cisaillement dans le film sont :
u 1 p
( 2 z h ) ( U 2 U1 )
z 2 r
x y
h
v 1 p (III-48)
y z ( 2z h ) ( V2 V1 )
z 2r h
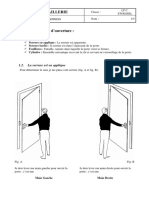
4. Exemple simple d’application de l’équation de Reynolds :
Un contact formé d’un cylindre tournant autour de son axe, à une vitesse angulaire ω, en
regard d’un plan se déplaçant parallèlement à lui-même, à la vitesse U, illustre ce
problème (figure III-6).
Chapitre Trois : Equations de base de la Lubrification 54
Cours Tribologie Prof. BOUCHERIT H.
Fig.III-6 : Contact cylindre plan
Dans le cas d’un écoulement incompressible, bidimensionnel, l’équation de Reynolds
III-43 se réduit à :
h 3 p 1 h h
( U1 U 2 )
x 12 x 2 x t
Soit,
h 3 p h h
6( U1 U 2 ) 12
x x x t
dh h h
On a, V2 = U2
dt t x
h 3 p h
Ainsi, 6( U1 U 2 ) 12V2
x x x
Dans le système d’axes choisi, la vitesse des surfaces s’écrit :
U1 = U
U2
V2
h
Dans la zone du contact, l’angle , donné par est très petit (de l’ordre de
x
10-3) et il vient :
h
x
1
h
Soit, U2 = ω R et V2 = ω R
x
Ainsi, l’équation de Reynolds dans ce cas elle devient :
h 3 p h
6( U R )
x x x
Ainsi, le second membre de l’équation de Reynold est proportionnel à U + R ω (vitesse
de roulement) et c’est la somme des vitesses tangentielles du contact qui génère la
portance dans le film.
Cependant, même en régime stationnaire, la vitesse d’écrasement respectivement W2 et
V2 selon le système de coordonnées, joue un rôle très important.
Chapitre Trois : Equations de base de la Lubrification 55
Vous aimerez peut-être aussi
- Serrures CoursDocument5 pagesSerrures Courspoliceman911Pas encore d'évaluation
- Peugeot 407 1,6L HDI - Remplissage Du Réservoir de CérineDocument11 pagesPeugeot 407 1,6L HDI - Remplissage Du Réservoir de Cérinedjamel76610100% (2)
- Cours Hydraulique 86 Joints Hydrauliques 1Document2 pagesCours Hydraulique 86 Joints Hydrauliques 1GERALD SIMONPas encore d'évaluation
- Chapitre Quatre 2022Document31 pagesChapitre Quatre 2022Raniya TebbalPas encore d'évaluation
- Chapitre Deux 23Document31 pagesChapitre Deux 23Raniya Tebbal100% (1)
- Produit RaccordDocument22 pagesProduit RaccordAnonymous NonQwK3qL2Pas encore d'évaluation
- Materiaux Des JointsDocument3 pagesMateriaux Des Jointssosi2020Pas encore d'évaluation
- Digue À TalusDocument187 pagesDigue À TalussimoPas encore d'évaluation
- RTAXsara DW8Document54 pagesRTAXsara DW8Djerboub LoulaPas encore d'évaluation
- 478 S - Huiles Hyd - CaractéristiquesDocument26 pages478 S - Huiles Hyd - CaractéristiquesNacer Nacer100% (2)
- Mode D'emploi DiviseurDocument6 pagesMode D'emploi DiviseurNassro ZiadPas encore d'évaluation
- TEST Mécanique Industrielle Niveau 2Document3 pagesTEST Mécanique Industrielle Niveau 2Manishimwe ThierryPas encore d'évaluation
- Gamme D'usinageDocument38 pagesGamme D'usinagemoha ayàPas encore d'évaluation
- Caractéristiques: GénéralitésDocument12 pagesCaractéristiques: GénéralitésLE BARONPas encore d'évaluation
- Catalogue ChambrierDocument100 pagesCatalogue Chambrierpatrick charpiatPas encore d'évaluation
- 07 590 Conversions Tableau de Correspondance Des Metaux Et AlliagesDocument4 pages07 590 Conversions Tableau de Correspondance Des Metaux Et Alliagesnovocaine67Pas encore d'évaluation
- Huile MoteurDocument5 pagesHuile Moteurthabti100% (1)
- CCM Fr-Ang 2000-07Document36 pagesCCM Fr-Ang 2000-07ghrairi100% (1)
- Oxycoupage TableauDocument7 pagesOxycoupage Tableaujoker63000Pas encore d'évaluation
- 3901 Ni 92252042Document49 pages3901 Ni 92252042MOHAM BELHOUDAPas encore d'évaluation
- Solex VeloSolex 3800 1ere-GenerationDocument18 pagesSolex VeloSolex 3800 1ere-GenerationOlga2k9Pas encore d'évaluation
- Buse TKN-FT-v2Document4 pagesBuse TKN-FT-v2wadiiPas encore d'évaluation
- Couple Serrage Inox A2 A4 Couple Ltyp1Document1 pageCouple Serrage Inox A2 A4 Couple Ltyp1Vivien EmeraldoPas encore d'évaluation
- Produits Métalliques: NF EN 10204Document10 pagesProduits Métalliques: NF EN 10204OULD MATOUK AbdellahaPas encore d'évaluation
- Citroen C2R2 ManualDocument27 pagesCitroen C2R2 ManualÁlvaro Seoane100% (1)
- CH1 Position de La Reparation en Maintenance PDFDocument6 pagesCH1 Position de La Reparation en Maintenance PDFBen MahPas encore d'évaluation
- Good DDDDDocument16 pagesGood DDDDMounir Frija100% (1)
- Fluides Hydrauliques 2Document3 pagesFluides Hydrauliques 2Outman BenaouissPas encore d'évaluation
- PCM PumpDocument7 pagesPCM PumpOncstGabesPas encore d'évaluation
- Llubrification L2-3Document4 pagesLlubrification L2-3ousmanePas encore d'évaluation
- Chloric CCDocument1 pageChloric CCFarPas encore d'évaluation
- 8.2.les LubrifiantsDocument2 pages8.2.les LubrifiantsYacouba Ouedraogo100% (1)
- Calcul Verin PneumatiqueDocument3 pagesCalcul Verin PneumatiqueiarabenPas encore d'évaluation
- Turbo Oil T 46Document3 pagesTurbo Oil T 46greendayzarePas encore d'évaluation
- Fiche Produit: Accel Fusion 5W-40Document2 pagesFiche Produit: Accel Fusion 5W-40houssem houssemPas encore d'évaluation
- Chapitre 3 - Procédés Sans Enlèvement de MatièreDocument17 pagesChapitre 3 - Procédés Sans Enlèvement de MatièreEpimaque Nkurunziza100% (1)
- Moteurs AntideflagrantsDocument15 pagesMoteurs AntideflagrantsKanePas encore d'évaluation
- Cahier Des Charges PneusDocument3 pagesCahier Des Charges PneusMounir Yousfi100% (1)
- NT AnnulDocument46 pagesNT AnnulMed HdijiPas encore d'évaluation
- Travaux Pratique: Circuit RefroidissementDocument8 pagesTravaux Pratique: Circuit RefroidissementrabbajPas encore d'évaluation
- La Rugosite - MitutoyoDocument47 pagesLa Rugosite - Mitutoyoyannrouge0150% (2)
- Vocabulaire MaritimeDocument25 pagesVocabulaire MaritimePeter DotselaerePas encore d'évaluation
- Cours Prof Cap Les VitragesDocument9 pagesCours Prof Cap Les VitragesgaterPas encore d'évaluation
- d02 0 Tribologie IntroDocument1 paged02 0 Tribologie IntroMohamed MohamedPas encore d'évaluation
- Chapitre.3 - Régimes de LubrificationDocument18 pagesChapitre.3 - Régimes de LubrificationbenhalimaPas encore d'évaluation
- Peugeot 307: Graissage EntretienDocument1 pagePeugeot 307: Graissage EntretienLE BARONPas encore d'évaluation
- C.wathoul - L'AllumageDocument192 pagesC.wathoul - L'Allumagebelgam2Pas encore d'évaluation
- Cat2 TIGDocument41 pagesCat2 TIGH_DEBIANEPas encore d'évaluation
- CH1 Position de La Reparation en Maintenance PDFDocument6 pagesCH1 Position de La Reparation en Maintenance PDFSid Ahmed SlimanePas encore d'évaluation
- PIMECA - Memento Cotation Iso Gps (8015 - 1101 - 5458 - 5459 - 2692 - 14405 - 10579)Document28 pagesPIMECA - Memento Cotation Iso Gps (8015 - 1101 - 5458 - 5459 - 2692 - 14405 - 10579)SachinPas encore d'évaluation
- C11 AjustementsDocument55 pagesC11 AjustementsYosri GostPas encore d'évaluation
- B - Sujet STI CAPLP M Ext 2007Document43 pagesB - Sujet STI CAPLP M Ext 2007Ghizlane ID100% (1)
- DR03 Transmission CDocument5 pagesDR03 Transmission CAbdellah FaqdaniPas encore d'évaluation
- Flexibles Embout Adapt PDFDocument74 pagesFlexibles Embout Adapt PDFSiding Barro100% (1)
- Docs Ressources TP S.E.R.PDocument12 pagesDocs Ressources TP S.E.R.PgastronomicaPas encore d'évaluation
- Cotation Tolérancée Et AjustementsDocument21 pagesCotation Tolérancée Et Ajustementsboukottaya borhenePas encore d'évaluation
- Norme Européenne: NF EN 10028-6Document14 pagesNorme Européenne: NF EN 10028-6Noureddine SemaraPas encore d'évaluation
- Chapitre 3Document12 pagesChapitre 3hichampikpok2021Pas encore d'évaluation
- Cours 2016 2017Document66 pagesCours 2016 2017Mengyan XiongPas encore d'évaluation
- PCSI Ads Introduction A La Mecanique Du Vol-2Document12 pagesPCSI Ads Introduction A La Mecanique Du Vol-2Rachid BenjalouajaPas encore d'évaluation
- Filtration Théorie TP 22Document18 pagesFiltration Théorie TP 22othmane boubaradPas encore d'évaluation
- Travaux Diriges Avec CorrectionDocument2 pagesTravaux Diriges Avec CorrectionAliOucharPas encore d'évaluation
- Fluides Non-Newtoniens: ULB - Faculté Des Sciences - Département de PhysiqueDocument5 pagesFluides Non-Newtoniens: ULB - Faculté Des Sciences - Département de PhysiqueOussama ChahirPas encore d'évaluation
- Om5021 2be1 30-70 FR 20160115Document62 pagesOm5021 2be1 30-70 FR 20160115Brahim ABAGHOUGHPas encore d'évaluation
- Fiche Technique Surpresseur CR3-9 GrundfosDocument12 pagesFiche Technique Surpresseur CR3-9 GrundfosTIAPANIPas encore d'évaluation
- DimensionnementsDocument20 pagesDimensionnementsMahmoud RiguenPas encore d'évaluation
- Aero Meca Vol-V4Document162 pagesAero Meca Vol-V4saraPas encore d'évaluation
- TD FluideDocument2 pagesTD FluideMbarek Orabi100% (2)
- Corrigé Type Du Modue Les Écoulements en Charge Master 1 Hydraulique UrbaineDocument5 pagesCorrigé Type Du Modue Les Écoulements en Charge Master 1 Hydraulique UrbaineMimouna TabetPas encore d'évaluation
- ANDA ONDO 2013 ArchivageDocument167 pagesANDA ONDO 2013 ArchivageYassine OuldkPas encore d'évaluation
- Essai DPTDocument12 pagesEssai DPTSaharPas encore d'évaluation
- Diapos Chap1 H2023 Cours2 PDFDocument28 pagesDiapos Chap1 H2023 Cours2 PDFDiallPas encore d'évaluation
- Catalogue Valve FRDocument276 pagesCatalogue Valve FRHatem LaajiliPas encore d'évaluation
- Grundfosliterature 5439573Document14 pagesGrundfosliterature 5439573WilliamsPas encore d'évaluation
- TP Etude de La Reaction Dun JetDocument8 pagesTP Etude de La Reaction Dun Jetfares balaz100% (1)
- Chapter - 5-3 FRDocument39 pagesChapter - 5-3 FRDEXPas encore d'évaluation
- Mecaflu CH5Document28 pagesMecaflu CH5api-3735377Pas encore d'évaluation
- Fluide 4Document7 pagesFluide 4Màr WàPas encore d'évaluation
- Memoire Master HAMROUNI KAMAL - CompressedDocument74 pagesMemoire Master HAMROUNI KAMAL - CompressedVictor MutebaPas encore d'évaluation
- Cours Mecanique Fluides - Chapitres 6 Et 7Document16 pagesCours Mecanique Fluides - Chapitres 6 Et 7chadiPas encore d'évaluation
- Polycope - MDF Mecaflu PDFDocument75 pagesPolycope - MDF Mecaflu PDFNAFISSA BOURQUIAPas encore d'évaluation
- 1846594Document5 pages1846594davsouPas encore d'évaluation
- Exercices de RévisionDocument1 pageExercices de Révisionoussama bensassiPas encore d'évaluation
- TD N°2 EXERCICES ET SOLUTIONSDocument4 pagesTD N°2 EXERCICES ET SOLUTIONSAzzedine GarahPas encore d'évaluation
- Exemple Du VentDocument8 pagesExemple Du VentEma EmiliaPas encore d'évaluation
- Sanirel 250 500v Double Pompes Barre de Guidage BrochureDocument4 pagesSanirel 250 500v Double Pompes Barre de Guidage BrochureZakaria ChemichaPas encore d'évaluation
- Machines HydrauliquesDocument72 pagesMachines HydrauliquesBrahim ABAGHOUGHPas encore d'évaluation
- Cours D'usure 2016Document78 pagesCours D'usure 2016mahmoudmain_24273317100% (1)