Vous aimerez peut-être aussi
- Exercices d'optique et d'électromagnétismeD'EverandExercices d'optique et d'électromagnétismeÉvaluation : 5 sur 5 étoiles5/5 (1)
- A.I.L. - Corrige - Quelques Exercices Ampli OpérationnelsDocument4 pagesA.I.L. - Corrige - Quelques Exercices Ampli OpérationnelsFranco FrancoPas encore d'évaluation
- TD Electronique Fondamentale j1Document33 pagesTD Electronique Fondamentale j1halim otmane100% (3)
- Partie5 Parametres S PDFDocument62 pagesPartie5 Parametres S PDFNisrine Bahri67% (3)
- TD Electricite C PDFDocument18 pagesTD Electricite C PDFseif100% (1)
- Cours Electronique Puissance Ch1Document20 pagesCours Electronique Puissance Ch1arnaud29100% (1)
- Arduino Pour Les NulsDocument4 pagesArduino Pour Les NulsBenabdoPas encore d'évaluation
- TP #3 Théorème de ThéveninDocument6 pagesTP #3 Théorème de ThéveninOussama Guettari100% (1)
- ELECTRONIQUE ROBOTIQUE - COURS - ETUDE ET CALCULS - TOME N°2 - 88 PGDocument88 pagesELECTRONIQUE ROBOTIQUE - COURS - ETUDE ET CALCULS - TOME N°2 - 88 PGBruno Chopin100% (1)
- Composant Actifs Pour L'électronique de Puissance PDFDocument288 pagesComposant Actifs Pour L'électronique de Puissance PDFRomaysa jijiPas encore d'évaluation
- TD1: Synthèse VHDL: Exercice 1Document2 pagesTD1: Synthèse VHDL: Exercice 1Mohamed Aziz Ben RomdhanePas encore d'évaluation
- A.I.L. - Corrige - Quelques ExercicesDocument4 pagesA.I.L. - Corrige - Quelques ExercicesSidi Abdallahi75% (4)
- Rappels ElectrocinetiqueDocument5 pagesRappels ElectrocinetiqueDavid KientegaPas encore d'évaluation
- Tc3a9lc3a9charger Ici 4Document5 pagesTc3a9lc3a9charger Ici 4superieursuperieur970Pas encore d'évaluation
- Cours3 ElectroniqueI 0506Document7 pagesCours3 ElectroniqueI 0506HALAILIPas encore d'évaluation
- TD 3Document9 pagesTD 3cool clips100% (1)
- TD2 CorrectionDocument17 pagesTD2 CorrectionOussama BeddaPas encore d'évaluation
- Electronique de Base: Redouane RMAILY Département de Physique 2019-2020Document152 pagesElectronique de Base: Redouane RMAILY Département de Physique 2019-2020The X prof academy أكاديمية الأستاذ المجهولPas encore d'évaluation
- Circuits Electrique Et Électronique MIP S2 A B - 2020Document148 pagesCircuits Electrique Et Électronique MIP S2 A B - 2020DR33Z3RPas encore d'évaluation
- Théorème de ThéveninDocument1 pageThéorème de ThéveninIsmaila SoumarePas encore d'évaluation
- TP Circuits Electriques-Electronique MIPC S (B)Document10 pagesTP Circuits Electriques-Electronique MIPC S (B)Amine AlaouiPas encore d'évaluation
- 004927175Document4 pages004927175elkamous youssefPas encore d'évaluation
- TD Prepa Ana 2elt2Document2 pagesTD Prepa Ana 2elt2Phenix PhenixPas encore d'évaluation
- Projet de Circuit Tout TPDocument33 pagesProjet de Circuit Tout TPdanherdoniPas encore d'évaluation
- TD Electronique de Puissance Serie de TD N1!23!24Document2 pagesTD Electronique de Puissance Serie de TD N1!23!24bouteraa ZakariaPas encore d'évaluation
- PFC NewDocument10 pagesPFC NewGhouti Fares HaouliaPas encore d'évaluation
- TP Oscillateur À Pont de Wien SIMULATION Ou ThéoriqueDocument3 pagesTP Oscillateur À Pont de Wien SIMULATION Ou ThéoriqueThê Ēxęptïon100% (1)
- CH 1 Cours 3Document20 pagesCH 1 Cours 3fares khenPas encore d'évaluation
- SMIA-S2 Electricité TD3 CorrigéDocument6 pagesSMIA-S2 Electricité TD3 CorrigéEs.sabery IsmailPas encore d'évaluation
- Cours2 ElectroniqueI 0506Document7 pagesCours2 ElectroniqueI 0506HALAILIPas encore d'évaluation
- Travaux Pratique 3 2324-1Document14 pagesTravaux Pratique 3 2324-1orsiny clinton TCHAPTCHETPas encore d'évaluation
- TD Capteurs 2eme Année GBDocument26 pagesTD Capteurs 2eme Année GBWadie ElPas encore d'évaluation
- Cours EAN SMP S5Document59 pagesCours EAN SMP S5meryemlgarrahPas encore d'évaluation
- Théorèmes FonamentauxDocument4 pagesThéorèmes FonamentauxYoussra Dje100% (1)
- 0a-Epi 1Document77 pages0a-Epi 1Riad TPas encore d'évaluation
- Electronique de Base CCDocument28 pagesElectronique de Base CCSebastien BodinPas encore d'évaluation
- E Cont Phase2Document4 pagesE Cont Phase2Mectronique 201BPas encore d'évaluation
- Caisse À Clou de L'électricienDocument6 pagesCaisse À Clou de L'électriciencontestable100% (1)
- TP DDocument17 pagesTP DNizar El OuahabiPas encore d'évaluation
- 6-Eln Fond Amplificateurs OpérationnelsDocument12 pages6-Eln Fond Amplificateurs Opérationnelsجيلالي هه'هPas encore d'évaluation
- TP1 Eln L2 ELT 2022 2023Document13 pagesTP1 Eln L2 ELT 2022 2023deltahamza31Pas encore d'évaluation
- Transistors A Commutation PDFDocument6 pagesTransistors A Commutation PDFAmigoAlgerainoPas encore d'évaluation
- Chap II - REDRESSEMENT NON COMMANDE SIMPLE ALTERNANCEDocument5 pagesChap II - REDRESSEMENT NON COMMANDE SIMPLE ALTERNANCEkouassinehemie320Pas encore d'évaluation
- Corrige Harmonise de CeinDocument6 pagesCorrige Harmonise de CeinRENE SEUJIPPas encore d'évaluation
- Résumé Electricite-ElectroniqueDocument7 pagesRésumé Electricite-ElectroniqueOumarou HamissouPas encore d'évaluation
- Tp2 Pont de Wheatstone-ConvertiDocument3 pagesTp2 Pont de Wheatstone-ConvertiDjamel BoukredimiPas encore d'évaluation
- Examen de Rattrapage USTHBDocument4 pagesExamen de Rattrapage USTHBMarie Mimii100% (1)
- Exercice 2: La Caractéristique D'un Conducteur Ohmique: Calculer Le Courant Qui Circule Dans La Résistance RXDocument2 pagesExercice 2: La Caractéristique D'un Conducteur Ohmique: Calculer Le Courant Qui Circule Dans La Résistance RXAbdalla SerriaPas encore d'évaluation
- Tp2 Pont de WheatstoneDocument3 pagesTp2 Pont de WheatstoneDjamel BoukredimiPas encore d'évaluation
- 1rappel 1 5Document5 pages1rappel 1 5BADR MTIRAOUIPas encore d'évaluation
- Gradateurs 2Document2 pagesGradateurs 2Fatima EzzahraPas encore d'évaluation
- Trigger de ShmittDocument7 pagesTrigger de Shmittmajido777Pas encore d'évaluation
- TD Transistore BipolaireDocument5 pagesTD Transistore BipolaireOthmane EL BAROUDIPas encore d'évaluation
- Exercice Electricite 2-01 RésistanceDocument42 pagesExercice Electricite 2-01 Résistanceabdo08100% (2)
- Redressement Monophase Simple Alternance A DiodeDocument4 pagesRedressement Monophase Simple Alternance A Diodearech43Pas encore d'évaluation
- ElecpasDocument5 pagesElecpasTaha AlliPas encore d'évaluation
- Chapitre III (Projet1)Document16 pagesChapitre III (Projet1)Anourset AnourPas encore d'évaluation
- Electronique Analogique: Mars 2021Document74 pagesElectronique Analogique: Mars 2021Avrelle OyouaPas encore d'évaluation
- Cours 1Document64 pagesCours 1lllcarinolllPas encore d'évaluation
- Radiolocman 2015 / 08Document70 pagesRadiolocman 2015 / 08Александр БорисовPas encore d'évaluation
- 07 CHP Electrostat TD EnonceDocument4 pages07 CHP Electrostat TD EnonceYoussef MahdiPas encore d'évaluation
- 332 Doc6Document66 pages332 Doc6Joy UpPas encore d'évaluation
- FR 171220 111254 ME VmarUd PDFDocument18 pagesFR 171220 111254 ME VmarUd PDFYynn FerdinandPas encore d'évaluation
- TP1 Resistivite Feuille ResultatDocument2 pagesTP1 Resistivite Feuille ResultatHajar TouilPas encore d'évaluation
- Foldback CurrentDocument2 pagesFoldback CurrentAchraf TourkiPas encore d'évaluation
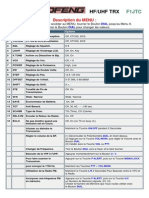
- Aide Mémoire Du BAOFENG UV-3RDocument2 pagesAide Mémoire Du BAOFENG UV-3RbenchycoolPas encore d'évaluation
- Contenu Composant ElectroniqueDocument5 pagesContenu Composant ElectroniqueSidiPas encore d'évaluation
- Réponse Fréquentielle Des Systèmes Linéaires-Chapitre 3Document26 pagesRéponse Fréquentielle Des Systèmes Linéaires-Chapitre 3Youness KacharPas encore d'évaluation
- EMD STRM2 - 2019 (Rattrapage) (Corrigé)Document4 pagesEMD STRM2 - 2019 (Rattrapage) (Corrigé)nait amara zaidPas encore d'évaluation
- Alim TDDocument30 pagesAlim TDkoneelias.0200Pas encore d'évaluation
- Hacheur - Série 1 PDFDocument2 pagesHacheur - Série 1 PDFADAM DAFERPas encore d'évaluation
- B11 TP PDFDocument15 pagesB11 TP PDFAouatif AouatifoPas encore d'évaluation
- TP2: Synthèse de Filtres Numériques RII: Réaliser ParDocument24 pagesTP2: Synthèse de Filtres Numériques RII: Réaliser ParSarra Sdiri100% (1)
- French Guide Rapide Tailles 1 A 4 M200-201 - (0478-0073)Document66 pagesFrench Guide Rapide Tailles 1 A 4 M200-201 - (0478-0073)9kdp2jhkcrPas encore d'évaluation
- Faisceaux Hertziens Analogiques PDFDocument2 pagesFaisceaux Hertziens Analogiques PDFLauren100% (1)
- TD Electronique Analogique: Universite Mohammed Premier Ensa - OujdaDocument5 pagesTD Electronique Analogique: Universite Mohammed Premier Ensa - Oujdaamine vayPas encore d'évaluation
- Elec FiltresDocument124 pagesElec FiltresF_A_13Pas encore d'évaluation
- Algebre Relationnelle PDFDocument30 pagesAlgebre Relationnelle PDFalios221Pas encore d'évaluation
- NE555 en Bascules Monostable Et AstableDocument6 pagesNE555 en Bascules Monostable Et AstablevyasnaikoPas encore d'évaluation
- TP Hacheur SérieDocument12 pagesTP Hacheur SérieÃd ËlPas encore d'évaluation
- Trame MICDocument35 pagesTrame MIChelmiultras100% (6)
- Memento Do2000Document6 pagesMemento Do2000ZoubaierPas encore d'évaluation
- Les Automates Programmables IndustriellesDocument13 pagesLes Automates Programmables Industriellessaad ratbiPas encore d'évaluation
- Automate TSX 37 PDFDocument10 pagesAutomate TSX 37 PDFLASSAADPas encore d'évaluation