Vous aimerez peut-être aussi
- Évaluations nationales des acquis scolaires, Volume 3: Mettre en oeuvre une évaluation nationale des acquis scolairesD'EverandÉvaluations nationales des acquis scolaires, Volume 3: Mettre en oeuvre une évaluation nationale des acquis scolairesÉvaluation : 1 sur 5 étoiles1/5 (1)
- Présentation Fleet Tracking - IT SERVICES PDFDocument11 pagesPrésentation Fleet Tracking - IT SERVICES PDFArnaud KouamPas encore d'évaluation
- Introduction à la douane commerciale au Canada: Comprendre les procédures douanières d'importation de marchandisesD'EverandIntroduction à la douane commerciale au Canada: Comprendre les procédures douanières d'importation de marchandisesPas encore d'évaluation
- AFT Introduction À La GéolocalisationDocument7 pagesAFT Introduction À La GéolocalisationHandresyMandimbyPas encore d'évaluation
- Cours Technique - AssurancesDocument65 pagesCours Technique - AssurancesHanisa MusovicPas encore d'évaluation
- e.driver Professional: Examen théoriqueD'Everande.driver Professional: Examen théoriqueWalter Systems AG / e-universityPas encore d'évaluation
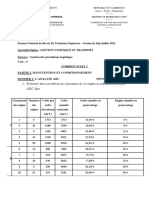
- Correction Sujet 2 Gestion Des Prestations Logis BTS GLTDocument6 pagesCorrection Sujet 2 Gestion Des Prestations Logis BTS GLTtchankou nyamsiPas encore d'évaluation
- DSI CAI Sujet 2018Document5 pagesDSI CAI Sujet 2018Mohssine AfandinaPas encore d'évaluation
- Support de Cours Intégral Supply Chain Management 2 - Prof. BoubakourDocument98 pagesSupport de Cours Intégral Supply Chain Management 2 - Prof. BoubakourDerbazi KhadidjaPas encore d'évaluation
- 2010 Memoire M2 Logistique - ROLLIER AnnaDocument154 pages2010 Memoire M2 Logistique - ROLLIER AnnaAlexis LouisPas encore d'évaluation
- 7 - PPT - La Gestion de Maintenance Assist e Par Ordinateur - FR D Ric Boutier 2Document15 pages7 - PPT - La Gestion de Maintenance Assist e Par Ordinateur - FR D Ric Boutier 2moPas encore d'évaluation
- SykslsmDocument13 pagesSykslsmÂît Àlï Ouâàddîi JamalPas encore d'évaluation
- Corrigé DS 2017Document5 pagesCorrigé DS 2017thouraya hadj hassenPas encore d'évaluation
- Corrigé Série 1: Logistique D'entreprise 1.08/1: Auteur: MDocument3 pagesCorrigé Série 1: Logistique D'entreprise 1.08/1: Auteur: MAya MlmPas encore d'évaluation
- EntreposageDocument30 pagesEntreposagerachidPas encore d'évaluation
- Cplex InteractifDocument24 pagesCplex InteractifHamza SaffajPas encore d'évaluation
- Chap 5.12 Suite Le Cross Docking PDFDocument11 pagesChap 5.12 Suite Le Cross Docking PDFSiradiouPas encore d'évaluation
- Livre Blanc Wms 5 3Document19 pagesLivre Blanc Wms 5 3nizar chihabiPas encore d'évaluation
- 83504tepa0207 01Document28 pages83504tepa0207 01Haifa JammeliPas encore d'évaluation
- Securite D'entrepôtDocument15 pagesSecurite D'entrepôtJean Jacques BabouPas encore d'évaluation
- Tableau IncotermDocument1 pageTableau IncotermmastaPas encore d'évaluation
- Kpis LogistiqueDocument6 pagesKpis LogistiqueManar HaddadPas encore d'évaluation
- Chapitre 3 - SimulationDocument50 pagesChapitre 3 - Simulationcyrine khbouPas encore d'évaluation
- Examen Final 2019Document7 pagesExamen Final 2019evianneyh8010100% (1)
- IncotermsDocument28 pagesIncotermsfaridPas encore d'évaluation
- Chapitre 3 VEDocument57 pagesChapitre 3 VEnajlae alfathiPas encore d'évaluation
- Article File D - Attente PDFDocument27 pagesArticle File D - Attente PDFAmine BouhilalPas encore d'évaluation
- La Logistique Globale Et Le Supply Chain ManagementDocument37 pagesLa Logistique Globale Et Le Supply Chain ManagementAhmed Zani0% (1)
- Résumé Méthodes D'approvisionnement Et Inventaire StockDocument10 pagesRésumé Méthodes D'approvisionnement Et Inventaire StockMohamed BoumhidiPas encore d'évaluation
- Valeur CibleDocument22 pagesValeur CibleFati FlourPas encore d'évaluation
- 1.statistique Appliquée À La Logistique PDFDocument18 pages1.statistique Appliquée À La Logistique PDFmouahi1862100% (2)
- CV Acheteur Bouhant - 1Document1 pageCV Acheteur Bouhant - 1FlorentPas encore d'évaluation
- Distribution - Cours - Partie 2Document22 pagesDistribution - Cours - Partie 2Imane Salam Labass BouazaPas encore d'évaluation
- IntroductionDocument13 pagesIntroductionMary LkPas encore d'évaluation
- CoursDocument60 pagesCoursYaya TOUREPas encore d'évaluation
- Chapitre I Generalites Typologies FluxDocument8 pagesChapitre I Generalites Typologies FluxMahdi Allani100% (1)
- Recherche OpérationnelleDocument32 pagesRecherche OpérationnelleTayssir AmmariPas encore d'évaluation
- CopackingDocument14 pagesCopackingsaadiasaadiaPas encore d'évaluation
- Manutentions Et Mesure Du TempsDocument37 pagesManutentions Et Mesure Du Tempstravail comptePas encore d'évaluation
- TransportDocument29 pagesTransportJean Colson StimphatPas encore d'évaluation
- Rapport Du Thème L'implantation Dynamique de L'entreposageDocument14 pagesRapport Du Thème L'implantation Dynamique de L'entreposageLOUBNA SmahiPas encore d'évaluation
- Manuel 20GSE 201 5 2 20 28r C3 A9vision 201 5 3 29Document105 pagesManuel 20GSE 201 5 2 20 28r C3 A9vision 201 5 3 29Rick AgbaPas encore d'évaluation
- Master-Localisation Et Optimisation Des Capacités de Stockage Des DépôtsDocument81 pagesMaster-Localisation Et Optimisation Des Capacités de Stockage Des DépôtsIlham TimadjerPas encore d'évaluation
- UML: Entrepot PDFDocument7 pagesUML: Entrepot PDFperico1962Pas encore d'évaluation
- Le Cas Picaso: Utilisation de PréludeDocument8 pagesLe Cas Picaso: Utilisation de PréludeAyoub RiahiPas encore d'évaluation
- Am - M101 - Metier Et Formation - MSDocument47 pagesAm - M101 - Metier Et Formation - MSelhoussaine.nahime00Pas encore d'évaluation
- Corrigé Etude de Cas HyperplusDocument4 pagesCorrigé Etude de Cas HyperplusDark NightPas encore d'évaluation
- L'impact de La Technologie de L'information Sur LaDocument8 pagesL'impact de La Technologie de L'information Sur LaNawal wardiPas encore d'évaluation
- Ahlam ZEMMOURIDocument61 pagesAhlam ZEMMOURITitaaTataPas encore d'évaluation
- La Gestion de La Chaine LogistiqueDocument111 pagesLa Gestion de La Chaine LogistiqueBouhadi KawtarPas encore d'évaluation
- ABC YoutubeDocument1 pageABC YoutubesoroPas encore d'évaluation
- MON Dossier GO Culture ManagérialeDocument39 pagesMON Dossier GO Culture ManagérialeSephora KapilukwaPas encore d'évaluation
- Prestataire Logistique 3PL-4PLDocument15 pagesPrestataire Logistique 3PL-4PLImane Salam Labass Bouaza100% (1)
- Chapitre 7 - AM - 2Document44 pagesChapitre 7 - AM - 2leePas encore d'évaluation
- Algo3 2 PDFDocument10 pagesAlgo3 2 PDFIS AAPas encore d'évaluation
- Décarbonées Mobilités: Un Défi GlobalDocument81 pagesDécarbonées Mobilités: Un Défi GlobalGrégoireSansonPas encore d'évaluation
- Inetum Pfebook 2022 2023Document23 pagesInetum Pfebook 2022 2023LAJMI SyrinePas encore d'évaluation
- ERDF - Dossier Evaluation LinkyDocument32 pagesERDF - Dossier Evaluation LinkyJean-Pierre Barbeau100% (1)
- Manuel de Meilleures Pratiques: L Etiquette Logistique ETL Avis D ExpeditionDocument38 pagesManuel de Meilleures Pratiques: L Etiquette Logistique ETL Avis D ExpeditionAbderrahim EzzaghyryPas encore d'évaluation
- Méthode de Deux Phases PLDocument14 pagesMéthode de Deux Phases PLSamah Sam Bouima100% (1)
- DocumentDocument161 pagesDocumentAbdelatif HrPas encore d'évaluation
- Ch2 AnnBDocument12 pagesCh2 AnnBagguiniPas encore d'évaluation
- Séance 4 STF PDFDocument20 pagesSéance 4 STF PDFagguiniPas encore d'évaluation
- Soln Pb6Document13 pagesSoln Pb6agguiniPas encore d'évaluation
- Seance 11Document73 pagesSeance 11agguiniPas encore d'évaluation
- Séance 05Document21 pagesSéance 05agguiniPas encore d'évaluation
- Ch3 AnnCDocument3 pagesCh3 AnnCagguiniPas encore d'évaluation
- Séance 10Document47 pagesSéance 10agguiniPas encore d'évaluation
- Ch2 AnnBDocument12 pagesCh2 AnnBagguiniPas encore d'évaluation
- Guide Utilisation Arena 2016Document4 pagesGuide Utilisation Arena 2016agguiniPas encore d'évaluation
- MémoireDocument154 pagesMémoireKalla Abdelkader0% (1)
- Fiabilite HumaineDocument26 pagesFiabilite HumaineagguiniPas encore d'évaluation
- STF Séance 3Document18 pagesSTF Séance 3agguiniPas encore d'évaluation
- Seance 2Document27 pagesSeance 2agguiniPas encore d'évaluation
- MOTRA GeneralitesDocument54 pagesMOTRA GeneralitesagguiniPas encore d'évaluation
- Cours D'initiation A La LogistiqueDocument32 pagesCours D'initiation A La LogistiqueRedouan EddehbiPas encore d'évaluation
- Economie Des Transports M1Document122 pagesEconomie Des Transports M1Sofiene Guedri100% (2)
- Doctorat LogistiqueDocument194 pagesDoctorat LogistiqueSd Midou Hajji100% (3)
- Chapitre 1 - La Logistique de Distribution - Enjeux Et Concepts FondamentauxDocument17 pagesChapitre 1 - La Logistique de Distribution - Enjeux Et Concepts FondamentauxagguiniPas encore d'évaluation
- ExportDocument1 pageExportagguiniPas encore d'évaluation
- Logistique Internationale Le Choix Du Mode de TransportDocument3 pagesLogistique Internationale Le Choix Du Mode de TransportagguiniPas encore d'évaluation
- These PDFDocument156 pagesThese PDFMedStrikePas encore d'évaluation
- CMC - Management de La Mobilite Et Securite Routiere en EntrepriseDocument39 pagesCMC - Management de La Mobilite Et Securite Routiere en EntrepriseagguiniPas encore d'évaluation
- Logistique Et DistributionDocument90 pagesLogistique Et DistributionagguiniPas encore d'évaluation
- Marketing Distributeur 1Document58 pagesMarketing Distributeur 1agguiniPas encore d'évaluation
- Ingénierie Logistique: La Logistique Du E-CommerceDocument83 pagesIngénierie Logistique: La Logistique Du E-CommerceagguiniPas encore d'évaluation
- Logistique Et DistributionDocument18 pagesLogistique Et DistributionagguiniPas encore d'évaluation
- CMC - Management de La Mobilite Et Securite Routiere en EntrepriseDocument39 pagesCMC - Management de La Mobilite Et Securite Routiere en EntrepriseagguiniPas encore d'évaluation
- PCBTP TopographieDocument2 pagesPCBTP TopographieSkilz GPas encore d'évaluation
- CV ActualiséDocument2 pagesCV ActualiséMehdi SalhiPas encore d'évaluation
- PPTX02-Environnement PowerpointDocument3 pagesPPTX02-Environnement PowerpointEddy SHANGAPas encore d'évaluation
- CH-Catalogue Plans de Maisons PDFDocument11 pagesCH-Catalogue Plans de Maisons PDFNidhal Ben MabroukPas encore d'évaluation
- Barre D'outils GeogebraDocument2 pagesBarre D'outils GeogebraAdil EnnassiriPas encore d'évaluation
- Série D'exercices - Math - Activités Numériques (1) - 1ère AsDocument2 pagesSérie D'exercices - Math - Activités Numériques (1) - 1ère Asamal matmati100% (1)
- TP #8 (PHP)Document3 pagesTP #8 (PHP)AlexoPas encore d'évaluation
- Cours TransformateurDocument30 pagesCours TransformateurMim MounaPas encore d'évaluation
- PROJET EM P1 FISA 2020 2021 EnonceDocument4 pagesPROJET EM P1 FISA 2020 2021 EnoncePierre LesurPas encore d'évaluation
- Fracture Numérique en AfriqueDocument64 pagesFracture Numérique en AfriqueYves Mouaha HandyPas encore d'évaluation
- Régressions Coniques, Quadriques, Circulaire, SphériqueDocument22 pagesRégressions Coniques, Quadriques, Circulaire, SphériqueJJacquelin100% (10)
- Generalites Sur Le Compresseur Alternatif A PistonDocument12 pagesGeneralites Sur Le Compresseur Alternatif A Pistonloic80% (5)
- Chapitre2 Introduction MongoDBDocument24 pagesChapitre2 Introduction MongoDBTEDx UniversitéCentralePas encore d'évaluation
- Antidemarrage Renault - 2008Document148 pagesAntidemarrage Renault - 2008Ali KadourPas encore d'évaluation
- 2019IMTA0142 Mustaki SimonDocument188 pages2019IMTA0142 Mustaki SimonAlaa EdinPas encore d'évaluation
- 04 Reduction CorrigeDocument18 pages04 Reduction Corrigeamine zzaouiPas encore d'évaluation
- UFED Supported Phone List 7.56Document1 494 pagesUFED Supported Phone List 7.56Ramiro GomezPas encore d'évaluation
- Réalisation D'une Liaison À Fibre Optique Entre Deux VillesDocument15 pagesRéalisation D'une Liaison À Fibre Optique Entre Deux VillesMhamdi AhlemPas encore d'évaluation
- Etude Cas AirBnBDocument4 pagesEtude Cas AirBnBLola LandPas encore d'évaluation
- Remote ControlDocument5 pagesRemote ControlMARIE VIANNEYPas encore d'évaluation
- Fiche D'Inscription Pedagogique 2022-2023: Identification FormationDocument2 pagesFiche D'Inscription Pedagogique 2022-2023: Identification FormationDokrissa KAMINAPas encore d'évaluation
- NAAJI Dorian Rapport de Projet PDFDocument58 pagesNAAJI Dorian Rapport de Projet PDFyeoi ganamPas encore d'évaluation
- 1 PBDocument23 pages1 PBIbtissamKhobzyPas encore d'évaluation
- MM KH15017003 Rev-ADocument16 pagesMM KH15017003 Rev-AJoendry ChirinosPas encore d'évaluation
- Miandry Rapport FinalDocument102 pagesMiandry Rapport FinalRayeXD100% (1)
- Cours InequationDocument3 pagesCours InequationYann PersonnePas encore d'évaluation
- Commande Des MCCDocument21 pagesCommande Des MCCAbdelmalike Bendjaafri100% (1)
- Cahier D Ecriture Chiffres Gratuit A TelechargerDocument24 pagesCahier D Ecriture Chiffres Gratuit A Telechargerkammoun.informatiquePas encore d'évaluation
- Partie4 JSFDocument11 pagesPartie4 JSFNouha MhadhbiPas encore d'évaluation
- CH2 FaoDocument40 pagesCH2 FaoHadil SadokPas encore d'évaluation
- L'Ombre à l'Univers: La structure des particules élémentaires XIIfD'EverandL'Ombre à l'Univers: La structure des particules élémentaires XIIfPas encore d'évaluation
- Électrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsD'EverandÉlectrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsÉvaluation : 5 sur 5 étoiles5/5 (1)
- La pensée dirigée: Traité sur le raisonnement et les logiquesD'EverandLa pensée dirigée: Traité sur le raisonnement et les logiquesÉvaluation : 5 sur 5 étoiles5/5 (2)
- Physique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresD'EverandPhysique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresÉvaluation : 5 sur 5 étoiles5/5 (2)
- Les LES TRUCS MATHEMATIQUES AU PRIMAIRE: et si on leur donnait du sens!D'EverandLes LES TRUCS MATHEMATIQUES AU PRIMAIRE: et si on leur donnait du sens!Évaluation : 2 sur 5 étoiles2/5 (1)
- L'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.D'EverandL'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.Pas encore d'évaluation
- Théorie relative de la musique: Maîtriser le mouvement par la logique des intervallesD'EverandThéorie relative de la musique: Maîtriser le mouvement par la logique des intervallesÉvaluation : 4 sur 5 étoiles4/5 (1)
- Mathématiques et Mathématiciens Pensées et CuriositésD'EverandMathématiques et Mathématiciens Pensées et CuriositésÉvaluation : 4.5 sur 5 étoiles4.5/5 (5)
- Sur les fondements de la théorie des ensembles transfinisD'EverandSur les fondements de la théorie des ensembles transfinisPas encore d'évaluation
- Saturne: Les Grands Articles d'UniversalisD'EverandSaturne: Les Grands Articles d'UniversalisPas encore d'évaluation
- Voyager à Travers les Mondes Parallèles pour Atteindre vos RêvesD'EverandVoyager à Travers les Mondes Parallèles pour Atteindre vos RêvesÉvaluation : 4 sur 5 étoiles4/5 (11)
- Guide complet de la Numérologie: Édition 30e anniversaireD'EverandGuide complet de la Numérologie: Édition 30e anniversaireÉvaluation : 4 sur 5 étoiles4/5 (1)
- Historique et description des procédés du daguerréotype et du diorama: Essai historique sur les sciences et techniquesD'EverandHistorique et description des procédés du daguerréotype et du diorama: Essai historique sur les sciences et techniquesPas encore d'évaluation
- Les 10 Secrets pour une Vie Plus Heureuse avec la Maladie de ParkinsonD'EverandLes 10 Secrets pour une Vie Plus Heureuse avec la Maladie de ParkinsonPas encore d'évaluation
- Je me prépare aux examens du ministère en mathématiques: Es-tu prêt à passer le test ?D'EverandJe me prépare aux examens du ministère en mathématiques: Es-tu prêt à passer le test ?Évaluation : 4 sur 5 étoiles4/5 (1)
- Le must bilingue™ du lycéen Vol. 2 - les maths en anglaisD'EverandLe must bilingue™ du lycéen Vol. 2 - les maths en anglaisPas encore d'évaluation
- Signe pour le Saint Graal? Énergie infinie avec des possibilités infinies! Mesurer avec l’antenne de Lecher à Carnac et en Bretagne en FranceD'EverandSigne pour le Saint Graal? Énergie infinie avec des possibilités infinies! Mesurer avec l’antenne de Lecher à Carnac et en Bretagne en FrancePas encore d'évaluation