Vous aimerez peut-être aussi
- Équations différentielles: Les Grands Articles d'UniversalisD'EverandÉquations différentielles: Les Grands Articles d'UniversalisPas encore d'évaluation
- Dictionnaire Amoureux Des Dieux Et Des DéessesDocument273 pagesDictionnaire Amoureux Des Dieux Et Des DéessesKone Assane100% (1)
- Elast EMD2 2003Document2 pagesElast EMD2 2003Ahmed Bel Haj BrahimPas encore d'évaluation
- Elast EMD2 2003 PDFDocument2 pagesElast EMD2 2003 PDFhakimkorichi100% (1)
- Equations Différentielles Du Second OrdreDocument2 pagesEquations Différentielles Du Second Ordresjaubert100% (3)
- Yaya Toure L2Modelisation Projet EDO Simulation Numerique Du Systeme OscillantDocument15 pagesYaya Toure L2Modelisation Projet EDO Simulation Numerique Du Systeme OscillantYaya TouréPas encore d'évaluation
- Systèmes de Deux Équations À Deux Inconnues 2011 2012 (Walid)Document2 pagesSystèmes de Deux Équations À Deux Inconnues 2011 2012 (Walid)Adam MokraniPas encore d'évaluation
- 30 Matrices CorrigeDocument11 pages30 Matrices CorrigeJules AlgorPas encore d'évaluation
- Master 1 - Correction - Examen2022Document2 pagesMaster 1 - Correction - Examen2022Yarin AmounaPas encore d'évaluation
- S ERIE 3 de M.Econom EtriquesDocument3 pagesS ERIE 3 de M.Econom EtriquesAmine StiouniPas encore d'évaluation
- Cours SystemesDocument7 pagesCours Systemeszara jijiPas encore d'évaluation
- Calcul Des Structures - Cours4 - 2019 - 2020Document27 pagesCalcul Des Structures - Cours4 - 2019 - 2020kjsghjPas encore d'évaluation
- Serie D'exercices N°2Document2 pagesSerie D'exercices N°2Deghboudj SamirPas encore d'évaluation
- Examen Analyse 3 & Corrigé - ENSHDocument9 pagesExamen Analyse 3 & Corrigé - ENSHAbdelaziz MezianPas encore d'évaluation
- Exam MACS1 1006Document7 pagesExam MACS1 1006el mlili YoussefPas encore d'évaluation
- Algèbre 2 - TD - N°2Document1 pageAlgèbre 2 - TD - N°2Tahirou Fane100% (1)
- Corrigé Principal Mai 2019Document7 pagesCorrigé Principal Mai 2019malek.jendoubiPas encore d'évaluation
- Correc TD 1Document6 pagesCorrec TD 1Anas EzzerabiPas encore d'évaluation
- Les Nombres RéelsDocument2 pagesLes Nombres Réelsimihi_hamidPas encore d'évaluation
- Serie13 2013corrige TD 2 MathDocument4 pagesSerie13 2013corrige TD 2 MathSeptimus PierrePas encore d'évaluation
- Corrige TypeDocument4 pagesCorrige Typedjamel bentorkiaPas encore d'évaluation
- Modes de Vibration-R Esolution: M Ecanique Analytique - TD 9 - Licence de Physique - ChimieDocument2 pagesModes de Vibration-R Esolution: M Ecanique Analytique - TD 9 - Licence de Physique - ChimieLerrys ObiangPas encore d'évaluation
- TD1 Calculus MP PeiP 21Document2 pagesTD1 Calculus MP PeiP 21jordanxvierPas encore d'évaluation
- Element Fini Poutre Grand RotationDocument14 pagesElement Fini Poutre Grand RotationlolotitiloloPas encore d'évaluation
- 31032021092635354514400135Document1 page31032021092635354514400135Faysal KhartitPas encore d'évaluation
- Corrige - CC2 - Calcul Des Structures 2018 - 2019Document5 pagesCorrige - CC2 - Calcul Des Structures 2018 - 2019Aya ChikerPas encore d'évaluation
- Lagrangiens, Ce N'est Qu'un D Ebut... : M Ecanique Analytique - TD 2 - Licence de Physique - ChimieDocument3 pagesLagrangiens, Ce N'est Qu'un D Ebut... : M Ecanique Analytique - TD 2 - Licence de Physique - ChimieLerrys ObiangPas encore d'évaluation
- CorrectionsDocument4 pagesCorrectionsTHONYPas encore d'évaluation
- Master - Exercices Corrigés CMDocument14 pagesMaster - Exercices Corrigés CMYOUSSEF SIYAHPas encore d'évaluation
- Corrigés Séries de TD Termodynamique Des Équilibres L3 2023Document45 pagesCorrigés Séries de TD Termodynamique Des Équilibres L3 2023chakiircherfPas encore d'évaluation
- CNC 2019 Math-2 TSI CorrectionDocument5 pagesCNC 2019 Math-2 TSI Correctionmed tabbouPas encore d'évaluation
- Td2 SLDocument7 pagesTd2 SLayoub akahPas encore d'évaluation
- Oscillateurs N Deg LiberteDocument19 pagesOscillateurs N Deg LibertealphaPas encore d'évaluation
- Examen MathDocument5 pagesExamen MathEPEBISSA Laude100% (2)
- ZerazdfvqscvbfghDocument8 pagesZerazdfvqscvbfghAmon BerberovicPas encore d'évaluation
- TD3 EqDiff 22Document1 pageTD3 EqDiff 22Ouma ImateeePas encore d'évaluation
- Mouvement Sur Une Surface: M Ecanique Analytique - TD 10 - Licence de Physique - ChimieDocument1 pageMouvement Sur Une Surface: M Ecanique Analytique - TD 10 - Licence de Physique - ChimieLerrys ObiangPas encore d'évaluation
- Chapitre 1Document13 pagesChapitre 1Nassim MillanoPas encore d'évaluation
- MVA013 Exos Equ Diff Matrices Corrige Cle092b96 PDFDocument4 pagesMVA013 Exos Equ Diff Matrices Corrige Cle092b96 PDFMalik MakPas encore d'évaluation
- Tpe SNLDocument6 pagesTpe SNLdilanho takamPas encore d'évaluation
- 1-Examen D'analyse Numerique-Université D'aix Marseille 1Document3 pages1-Examen D'analyse Numerique-Université D'aix Marseille 1Moumene MezPas encore d'évaluation
- Correction Exercices Fonctions UsuellesDocument5 pagesCorrection Exercices Fonctions UsuellesJeannine Dibonga moukekePas encore d'évaluation
- CorrectionexamDocument4 pagesCorrectionexamBamishola Aristide LOKEPas encore d'évaluation
- Elastoplasticite Des Systemes de Barres en Flexion: Chapitre IiiDocument19 pagesElastoplasticite Des Systemes de Barres en Flexion: Chapitre IiiAdnane100% (1)
- Corrigé Enstp 2011 2014Document9 pagesCorrigé Enstp 2011 2014SimonPas encore d'évaluation
- Correction Chap4Document4 pagesCorrection Chap4Soufiane MajdPas encore d'évaluation
- TD 1 Geodiff 2023 2024Document2 pagesTD 1 Geodiff 2023 2024ebenezer n'goranPas encore d'évaluation
- Examens Corriges Integrales MultiplesDocument5 pagesExamens Corriges Integrales MultiplesPhil ČhrýstaĺPas encore d'évaluation
- Flambement CH 10Document7 pagesFlambement CH 10Abdelillah feghoulPas encore d'évaluation
- Bouzida Amar Group 32 Matiere Math 2Document3 pagesBouzida Amar Group 32 Matiere Math 2Baha EddinePas encore d'évaluation
- Bouzida Amar Group 32 Matiere Math 2Document3 pagesBouzida Amar Group 32 Matiere Math 2Baha EddinePas encore d'évaluation
- DDS Cours 12Document44 pagesDDS Cours 12Tamba WafaaPas encore d'évaluation
- Exercice 12corDocument2 pagesExercice 12corMohammed aminePas encore d'évaluation
- Test Final Dét Et RSL (Jour) Esbtp 19-20 PDFDocument1 pageTest Final Dét Et RSL (Jour) Esbtp 19-20 PDFAdama Fangafossé CoulibalyPas encore d'évaluation
- Analyse Vectorielle CorrigeeDocument14 pagesAnalyse Vectorielle Corrigeemoura dalabraPas encore d'évaluation
- 2.TravDirigés UAO Bouaké 2020 2021 Equations DIfférentiellesDocument2 pages2.TravDirigés UAO Bouaké 2020 2021 Equations DIfférentiellesGuillaume KOUASSIPas encore d'évaluation
- Corrigé de Lexamen Du 11 Mai 2022Document10 pagesCorrigé de Lexamen Du 11 Mai 2022hitomi SuzunaPas encore d'évaluation
- TD1 SNL 2019-2020Document6 pagesTD1 SNL 2019-2020Dan SnowPas encore d'évaluation
- CorrigéOlympiades 7 C T1 M2020Document4 pagesCorrigéOlympiades 7 C T1 M2020Hmd SidiPas encore d'évaluation
- Item 362 - AesDocument4 pagesItem 362 - AesSofia RhellabPas encore d'évaluation
- Syllabus LAITS ET PRODUITS LAITIERS - 2Document3 pagesSyllabus LAITS ET PRODUITS LAITIERS - 2Gedion DouaPas encore d'évaluation
- Cours OrdonnacementDocument17 pagesCours OrdonnacementMed ArefPas encore d'évaluation
- Distr ProbaDocument37 pagesDistr ProbaOumaima OughnimaPas encore d'évaluation
- NF EN 1993-1-7 NA Aout 2008Document4 pagesNF EN 1993-1-7 NA Aout 2008fauvyPas encore d'évaluation
- Composition Et Correction Français 1AP T2Document4 pagesComposition Et Correction Français 1AP T2Boud Aek100% (1)
- Methode de TravailDocument2 pagesMethode de Travailamal akhoulouPas encore d'évaluation
- Estem: Eau Dans Le SolDocument27 pagesEstem: Eau Dans Le SolAlli BoukhchPas encore d'évaluation
- Cours 3 ProthèseDocument4 pagesCours 3 ProthèseDDan2005Pas encore d'évaluation
- Sup'air SellettesDocument1 pageSup'air SellettesStefanoPas encore d'évaluation
- Is - Corrigé de L - Étude de Cas Ayda (Version 2016)Document5 pagesIs - Corrigé de L - Étude de Cas Ayda (Version 2016)Hicham DaouchPas encore d'évaluation
- Karim, Ousmane Socé PDFDocument27 pagesKarim, Ousmane Socé PDFL’unique SuperboyPas encore d'évaluation
- AFAM - Projet de RechercheDocument23 pagesAFAM - Projet de RechercheAlbert Francis Abega MekongoPas encore d'évaluation
- Exos PDT Conjugaison G1Document16 pagesExos PDT Conjugaison G1Olivier Benard100% (1)
- TIG Ta33 Panneau de Commande FRDocument22 pagesTIG Ta33 Panneau de Commande FRk.a55Pas encore d'évaluation
- Page D'accueil - Espace Élèves - PRONOTE 2023.0.2.7 - Centre National d' Enseignement E-LearningDocument1 pagePage D'accueil - Espace Élèves - PRONOTE 2023.0.2.7 - Centre National d' Enseignement E-LearningzhcczgfbmwPas encore d'évaluation
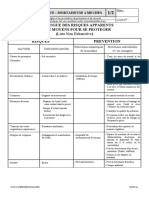
- S o Mortaiseuse MechesDocument2 pagesS o Mortaiseuse Mechesp bwPas encore d'évaluation
- Jeremie Gouyon Ok-2Document289 pagesJeremie Gouyon Ok-2leucinedijaPas encore d'évaluation
- Introduction A L'immunologieDocument9 pagesIntroduction A L'immunologieBalakibawi ESSOPas encore d'évaluation
- Cas IS AmortissementsDocument3 pagesCas IS AmortissementsT. AndersonPas encore d'évaluation
- PDFDocument24 pagesPDFCompétitionPas encore d'évaluation
- Solution TD3 Module POO Univ OuarglaDocument7 pagesSolution TD3 Module POO Univ OuarglaEmna KanzariPas encore d'évaluation
- Examples Questions Examen AcoustiqueDocument4 pagesExamples Questions Examen AcoustiquePierreFontenellePas encore d'évaluation
- AUguste Blanqui L'Éternité Par Les AstresDocument79 pagesAUguste Blanqui L'Éternité Par Les AstresYvan KalievPas encore d'évaluation
- Exam MDMDocument4 pagesExam MDMHaithem AminePas encore d'évaluation
- Les Thèmes Du Dalf C1Document28 pagesLes Thèmes Du Dalf C1Ioana Babarus100% (1)
- TD2 MCC Corrigé InfotroniqueDocument3 pagesTD2 MCC Corrigé InfotroniqueRima AlayaPas encore d'évaluation
- Matièreexamen 4 Ème Aet DDocument6 pagesMatièreexamen 4 Ème Aet DToby 17Pas encore d'évaluation
- Mur Types PDFDocument76 pagesMur Types PDFWafaa ElyaâgoubiPas encore d'évaluation