Vous aimerez peut-être aussi
- Le syndrome périodique associé à la cryopyrine (CAPS)D'EverandLe syndrome périodique associé à la cryopyrine (CAPS)Pas encore d'évaluation
- MembraneDocument14 pagesMembraneImene HarbaouiPas encore d'évaluation
- Série PILEDocument6 pagesSérie PILEHamami AymenPas encore d'évaluation
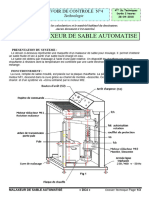
- Malaxeur de Sable AutomatiseDocument9 pagesMalaxeur de Sable AutomatiseHamada HamadaPas encore d'évaluation
- 01 - Systeme de Lavage Automatique de Vehicules - (DT)Document5 pages01 - Systeme de Lavage Automatique de Vehicules - (DT)salem jomaaPas encore d'évaluation
- Devoir de Synthèse N°2 - Technologie Dossier Technique MALAXEUR DE SABLE - Bac Technique (2010-2011) MR ZAAFOURI mEHREZDocument4 pagesDevoir de Synthèse N°2 - Technologie Dossier Technique MALAXEUR DE SABLE - Bac Technique (2010-2011) MR ZAAFOURI mEHREZsuiton fzPas encore d'évaluation
- Devoir de Synthèse N°1 2018 2019 (MR Bakini) PDFDocument10 pagesDevoir de Synthèse N°1 2018 2019 (MR Bakini) PDFPiere EbrahimPas encore d'évaluation
- Boîte de Vitesses PK4: CaractéristiquesDocument5 pagesBoîte de Vitesses PK4: CaractéristiquesDAGORNPas encore d'évaluation
- Série API 3techDocument4 pagesSérie API 3techAissa IsmailPas encore d'évaluation
- Dos TechDocument3 pagesDos TechNejib JallouliPas encore d'évaluation
- Poste Automatique de Séchage Et D'évacuation: RoyaumeDocument53 pagesPoste Automatique de Séchage Et D'évacuation: RoyaumeAbdelhakimPas encore d'évaluation
- BTS Schéma-AutoDocument3 pagesBTS Schéma-Autondiayemalick1008Pas encore d'évaluation
- Devoir de Synthèse N°2 2009 2010 (Baouicha)Document10 pagesDevoir de Synthèse N°2 2009 2010 (Baouicha)halim otmanePas encore d'évaluation
- ISTE TD Auto ET3 Fev 2023Document9 pagesISTE TD Auto ET3 Fev 2023bertrand Nathan ayenePas encore d'évaluation
- Auto - 1 - 2023 OkDocument8 pagesAuto - 1 - 2023 OkfjosephfabricePas encore d'évaluation
- Exercices Supp1Document3 pagesExercices Supp1Salem AmiratPas encore d'évaluation
- 34 - Systèmes Séquentiels - GRAFCET - Structure de Base OU Et ET Divers TDDocument8 pages34 - Systèmes Séquentiels - GRAFCET - Structure de Base OU Et ET Divers TDFadwa GHANIPas encore d'évaluation
- Etude Et Diagnostic D'un Moteur Thermique: Eléments de CorrectionDocument5 pagesEtude Et Diagnostic D'un Moteur Thermique: Eléments de CorrectionAnass ELABDI (Red Amazigh)100% (1)
- Devoir Corrigé de Synthèse N°2 - Génie Mécanique Unité de TRI Automatique Des Caisses - 3ème Technique (2013-2014) MR Ben Abdallah Marouan PDFDocument14 pagesDevoir Corrigé de Synthèse N°2 - Génie Mécanique Unité de TRI Automatique Des Caisses - 3ème Technique (2013-2014) MR Ben Abdallah Marouan PDFYosra Flh100% (1)
- DS2 2014 (DT)Document4 pagesDS2 2014 (DT)Bouabdellaoui saif ennasrPas encore d'évaluation
- Boîte de Vitesses Manuelle: CaractéristiquesDocument5 pagesBoîte de Vitesses Manuelle: CaractéristiquesBruno 9449Pas encore d'évaluation
- Dossier TechniqueDocument6 pagesDossier Techniqueمحمد بن موسى الخوارزمي0% (1)
- Devoir de Synthèse N°3 2015 2016 (MR Hadjkacem Abdelkarim)Document8 pagesDevoir de Synthèse N°3 2015 2016 (MR Hadjkacem Abdelkarim)ba WajihPas encore d'évaluation
- Examen AutomatismeDocument5 pagesExamen AutomatismeKadjePas encore d'évaluation
- TD1 BvaDocument5 pagesTD1 BvamohamedPas encore d'évaluation
- DT Sujet DS3 2023MDocument6 pagesDT Sujet DS3 2023MBouabdellaoui saif ennasrPas encore d'évaluation
- DS1-DT-Lavage PrepayeDocument10 pagesDS1-DT-Lavage PrepayeMouad MemniPas encore d'évaluation
- Distillerie Industrielle I-Presentation Du Systeme:: Lycée Imam Moslem El Menzah Devoir de Synthese N°3 Le 11/05/2017Document7 pagesDistillerie Industrielle I-Presentation Du Systeme:: Lycée Imam Moslem El Menzah Devoir de Synthese N°3 Le 11/05/2017Amira JebaliPas encore d'évaluation
- Devoir de Synthèse N°3 2011 2012 (Ben Abdallah Marouan) PDFDocument15 pagesDevoir de Synthèse N°3 2011 2012 (Ben Abdallah Marouan) PDFmohamed1101Pas encore d'évaluation
- TD GrafcetDocument6 pagesTD GrafcetJovy Berny100% (1)
- dc31 3st 2023 2Document4 pagesdc31 3st 2023 2labossefPas encore d'évaluation
- Devoir de Contrôle N°3 - Génie Mécanique Barrière Automatique - Bac Technique (2011-2012) MR Bakini NoomenDocument10 pagesDevoir de Contrôle N°3 - Génie Mécanique Barrière Automatique - Bac Technique (2011-2012) MR Bakini NoomenKhalil BkekriPas encore d'évaluation
- ASE 1er GR 2014-1Document22 pagesASE 1er GR 2014-1joshuakimmichjr06Pas encore d'évaluation
- Dossier Technique 95spDocument7 pagesDossier Technique 95spouhssainanouarPas encore d'évaluation
- Devoir 1 EST-1Document6 pagesDevoir 1 EST-1josias zinsouPas encore d'évaluation
- Cycles 2t ProfDocument5 pagesCycles 2t ProfHaingtPas encore d'évaluation
- Poste Automatique de Peinture de Paraboles1Document5 pagesPoste Automatique de Peinture de Paraboles1Badreddine KraiemPas encore d'évaluation
- PLAN MAINTENANCE PREVENTIVE-converti PDFDocument10 pagesPLAN MAINTENANCE PREVENTIVE-converti PDFKarim SadjiPas encore d'évaluation
- 4 SC Tech-dt-11-12-Systeme Automatique de MoulageDocument3 pages4 SC Tech-dt-11-12-Systeme Automatique de MoulageezzinePas encore d'évaluation
- Tte 03 Ce 1Document4 pagesTte 03 Ce 1Djerbien Slouma100% (1)
- TD6 EXOS HydrauliqueDocument12 pagesTD6 EXOS Hydrauliquedriss echanchni100% (3)
- Devoir Corrigé de Synthèse N°3 - Génie Mécanique Unité Flexible D'usinage - Bac Technique (2011-2012) MR Ben Abdallah Marouan - 2Document15 pagesDevoir Corrigé de Synthèse N°3 - Génie Mécanique Unité Flexible D'usinage - Bac Technique (2011-2012) MR Ben Abdallah Marouan - 2Bouabdellaoui saif ennasrPas encore d'évaluation
- Corrigé Type Construction G4 Du DT 2022 XDocument8 pagesCorrigé Type Construction G4 Du DT 2022 XJoseph AttignonPas encore d'évaluation
- DossierDocument3 pagesDossierبلال الحمديPas encore d'évaluation
- DT DC2 4NR 2023 2024Document2 pagesDT DC2 4NR 2023 2024Badreddine KraiemPas encore d'évaluation
- DTDocument4 pagesDTmohamed1101Pas encore d'évaluation
- Corrigé TSDEEA 1ADocument5 pagesCorrigé TSDEEA 1AOualid Ouadoudi88% (8)
- Devoir de Contrôle N°3 2013 2014 (Couche Moncef)Document8 pagesDevoir de Contrôle N°3 2013 2014 (Couche Moncef)Ayman TrikiPas encore d'évaluation
- Chap8 Aut Log Vol3 v2Document19 pagesChap8 Aut Log Vol3 v2Phoe NixPas encore d'évaluation
- Devoir de Contrôle N°2 - Génie Mécanique - Mécanisme D'entrainement Du Plateau Tournant - Bac Technique (2017-2018) MR MR GHORBEL MamdouhDocument8 pagesDevoir de Contrôle N°2 - Génie Mécanique - Mécanisme D'entrainement Du Plateau Tournant - Bac Technique (2017-2018) MR MR GHORBEL MamdouhAmira JebaliPas encore d'évaluation
- bacSSI 2006 Nouvelle Caledonie CorrigeDocument8 pagesbacSSI 2006 Nouvelle Caledonie CorrigeILyes AlimPas encore d'évaluation
- BTS 2018 Sujet Hydraulique Pneumatique (MM)Document4 pagesBTS 2018 Sujet Hydraulique Pneumatique (MM)cheikh ahmed tidiane fayePas encore d'évaluation
- Schéma TleDocument8 pagesSchéma Tlejosias zinsouPas encore d'évaluation
- DC3 2èmeSC2 22 23Document6 pagesDC3 2èmeSC2 22 23Adam BenPas encore d'évaluation
- Schema 4eme Annee 2Document4 pagesSchema 4eme Annee 2BAMALJoseph Firmin100% (5)
- Examens National 2bac STM Sci Ingen 2011 N PDFDocument24 pagesExamens National 2bac STM Sci Ingen 2011 N PDFHanane TounsiPas encore d'évaluation
- DevoirDocument3 pagesDevoirsoufiane8fkaPas encore d'évaluation
- 4 SC Tech Ds3!15!16 DT Unite DusinageDocument3 pages4 SC Tech Ds3!15!16 DT Unite DusinageDHia Ben AichaPas encore d'évaluation
- TUTORIAL-Tôlerie-Méthodes de Calcul de DéveloppésDocument7 pagesTUTORIAL-Tôlerie-Méthodes de Calcul de DéveloppésHaiPas encore d'évaluation
- 8146 - D Tableau de DistributionDocument3 pages8146 - D Tableau de DistributionMajdi BelguithPas encore d'évaluation
- Remplacement Mastervac c6Document6 pagesRemplacement Mastervac c6PMAPas encore d'évaluation
- Ct-2019-Lau 272 Lap 272Document3 pagesCt-2019-Lau 272 Lap 272oelbergluisPas encore d'évaluation
- Zenon Software Platform Folder A4 FRDocument6 pagesZenon Software Platform Folder A4 FRYakwinta ItalianoPas encore d'évaluation
- Audit de Climat SocialDocument21 pagesAudit de Climat SocialAbdelhay SahelPas encore d'évaluation
- Les Secrets Du Dessinateur AutoCADDocument327 pagesLes Secrets Du Dessinateur AutoCADMarielle Cavillon90% (10)
- Catalogue Stage Été ATS 2023Document11 pagesCatalogue Stage Été ATS 2023Amal AmamaPas encore d'évaluation
- Pourvoi N°18-23.884 01 07 2020Document5 pagesPourvoi N°18-23.884 01 07 2020Birouk HabibaPas encore d'évaluation
- BTS2 TD Concept FMDDocument20 pagesBTS2 TD Concept FMDLena Ais100% (1)
- Epreuve VraiDocument3 pagesEpreuve VraiSamen LempirePas encore d'évaluation
- Dakamar SarlDocument16 pagesDakamar Sarlam ahPas encore d'évaluation
- Interfaces Graphiques Cours 2Document31 pagesInterfaces Graphiques Cours 2nour alrafeePas encore d'évaluation
- Extrait Acoustique Du Batiment RapinDocument28 pagesExtrait Acoustique Du Batiment RapinVenveslas BALOUBIPas encore d'évaluation
- 1060 24 PDFDocument6 pages1060 24 PDFUnes JrdPas encore d'évaluation
- Mai 1 - 70Document70 pagesMai 1 - 70lewisroPas encore d'évaluation
- Rapport Type 7.4 FINALDocument102 pagesRapport Type 7.4 FINALait hssainPas encore d'évaluation
- FFB - Guide Des DéchetsDocument20 pagesFFB - Guide Des DéchetsProutPas encore d'évaluation
- Arrete 2009-014 Jouissance Des Conges 2 PDFDocument5 pagesArrete 2009-014 Jouissance Des Conges 2 PDFDOUGLASS TIOGOPas encore d'évaluation
- Modèle Rapport PfeDocument21 pagesModèle Rapport PfeAchraf Mous67% (6)
- Objectifs: Objectif Général D1: Travailler Dans Un Environnement Numérique Évolutif Objectifs SpécifiquesDocument14 pagesObjectifs: Objectif Général D1: Travailler Dans Un Environnement Numérique Évolutif Objectifs SpécifiquesAnge Ndouga nganPas encore d'évaluation
- Strategie D'entreprise PDFDocument23 pagesStrategie D'entreprise PDFkhaledPas encore d'évaluation
- Les Maisons BeyrouthinesDocument11 pagesLes Maisons BeyrouthinesMira El AyassPas encore d'évaluation
- Bordiga Commentairesmanuscrits1844 PDFDocument30 pagesBordiga Commentairesmanuscrits1844 PDFLotfiPas encore d'évaluation
- Composites Jean-Marie Berthelot PDFDocument667 pagesComposites Jean-Marie Berthelot PDFAlex Abad91% (11)
- D50102FR20 sg2Document492 pagesD50102FR20 sg2Djebrani AzizPas encore d'évaluation
- Manuel Manoeuvre Arca Ii. Niveau Avance PDFDocument166 pagesManuel Manoeuvre Arca Ii. Niveau Avance PDFJacquemin Attoue KouassiPas encore d'évaluation
- HillDocument2 pagesHillAhmed DergalPas encore d'évaluation
- Support Ciel Compta EvolutionDocument35 pagesSupport Ciel Compta EvolutionBAHPas encore d'évaluation