Vous aimerez peut-être aussi
- Examen AN 2016 - 17 + CorrigeDocument5 pagesExamen AN 2016 - 17 + CorrigeWiem MelkiPas encore d'évaluation
- Méthodes Économétriques Séance Du 25032020 - Hafid El HassaniDocument6 pagesMéthodes Économétriques Séance Du 25032020 - Hafid El HassanimidoPas encore d'évaluation
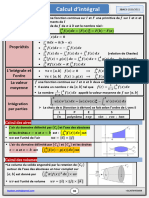
- Calcul IntegralDocument1 pageCalcul IntegralAbdelKarim dergoulPas encore d'évaluation
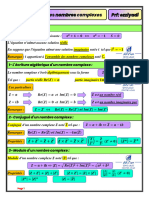
- Complexe TotaleDocument6 pagesComplexe TotaleZakaria EzziyadiPas encore d'évaluation
- Nombres Complexes1-2Document4 pagesNombres Complexes1-2Zakaria EzziyadiPas encore d'évaluation
- Optimisation 2Document7 pagesOptimisation 2Wiem MelkiPas encore d'évaluation
- 4.1correction - Sã© Rie - 6 - Cinã© Matique Du SolideDocument10 pages4.1correction - Sã© Rie - 6 - Cinã© Matique Du SolideHossam NajibPas encore d'évaluation
- cours_Mécanique_quantique_L2_chap_2_newDocument13 pagescours_Mécanique_quantique_L2_chap_2_newFabrice ArriaPas encore d'évaluation
- Fiche Physique quantique Chapitre 3Document4 pagesFiche Physique quantique Chapitre 3merièm rezguiPas encore d'évaluation
- Chapitre 3 - Changement de RéférentielDocument10 pagesChapitre 3 - Changement de RéférentielHamza BoutlihPas encore d'évaluation
- OD2 - TDC - Ondes - Acoustiques 7Document1 pageOD2 - TDC - Ondes - Acoustiques 7rachid idrissiPas encore d'évaluation
- Corrigé Examen PST - 10 Février 2022Document4 pagesCorrigé Examen PST - 10 Février 2022mayar mimiPas encore d'évaluation
- Chapitre 1Document4 pagesChapitre 1Zakaria Ghrissi alouiPas encore d'évaluation
- Chapitre 1 - Fonctions (Méthode:Fiche)Document3 pagesChapitre 1 - Fonctions (Méthode:Fiche)Саломея ЕяPas encore d'évaluation
- Examen1 Théorie Du ChampDocument3 pagesExamen1 Théorie Du ChampGACEM KARIMPas encore d'évaluation
- Formulaire 2.6 GEOMETRIE ComplexesDocument3 pagesFormulaire 2.6 GEOMETRIE Complexesgps.melisPas encore d'évaluation
- Chapitre Ii, CoursDocument7 pagesChapitre Ii, CoursabdouPas encore d'évaluation
- Ds2 2019 CorrigeDocument2 pagesDs2 2019 Corrigefarid regraguiPas encore d'évaluation
- Support TS - CH6 - L2etL3Document14 pagesSupport TS - CH6 - L2etL3Steven dav UchiwaPas encore d'évaluation
- Chapitre IDocument18 pagesChapitre IMamadou BambaPas encore d'évaluation
- Corrigé Examen de Remplacement PST (L3) 22 Féveier 2022Document3 pagesCorrigé Examen de Remplacement PST (L3) 22 Féveier 2022mayar mimiPas encore d'évaluation
- cours_Mécanique_quantique_L2_Chap_3_newDocument14 pagescours_Mécanique_quantique_L2_Chap_3_newFabrice ArriaPas encore d'évaluation
- Rappels-Signe+valeur Absolue+trigo-1bacDocument2 pagesRappels-Signe+valeur Absolue+trigo-1bacdohach24Pas encore d'évaluation
- MNA2Document5 pagesMNA218188yem3761Pas encore d'évaluation
- Spécial Vaccance 2-2SMDocument28 pagesSpécial Vaccance 2-2SMyunuabou3Pas encore d'évaluation
- Interrogation de Module Propagation Et AntenneDocument8 pagesInterrogation de Module Propagation Et AntenneBrahim LeguebedjPas encore d'évaluation
- Mathématiques 1: 4 Heures Calculatrice AutoriséeDocument4 pagesMathématiques 1: 4 Heures Calculatrice AutoriséeSoufiane MoustakbalPas encore d'évaluation
- 6 Solution TD 6Document6 pages6 Solution TD 6Mohamed HaddadPas encore d'évaluation
- 298269Document23 pages298269Hasina AndlPas encore d'évaluation
- Semaine 5Document9 pagesSemaine 5Kpabou KpabouPas encore d'évaluation
- Chapitre - 1 - Partie3 - Régime HarmoniqueDocument17 pagesChapitre - 1 - Partie3 - Régime Harmoniqueelectroniquepfe04Pas encore d'évaluation
- Chapitre 2 - Spin Et Addition de Moments AngulairesDocument4 pagesChapitre 2 - Spin Et Addition de Moments AngulaireshessoulPas encore d'évaluation
- Analyse Complexe Chapitre1Document6 pagesAnalyse Complexe Chapitre1Rania AboudiPas encore d'évaluation
- Chapitre 3Document6 pagesChapitre 3Boù ChràPas encore d'évaluation
- Test Diagnostique-2bac SCDocument1 pageTest Diagnostique-2bac SCAbdelkbir MoradiPas encore d'évaluation
- Correcteurs-analogiquesDocument15 pagesCorrecteurs-analogiquesMelissaPas encore d'évaluation
- MIA1 - Etudes Des Fonctions D'une Variable RéelleDocument28 pagesMIA1 - Etudes Des Fonctions D'une Variable Réellekakashihaku59Pas encore d'évaluation
- Chapitre3 SAPSDocument29 pagesChapitre3 SAPSHouda SenoussiPas encore d'évaluation
- Fiche Résumé Analyse Complexe (Niveau L3)Document2 pagesFiche Résumé Analyse Complexe (Niveau L3)SuperChocolatPas encore d'évaluation
- Chapitre 8 LET52Document6 pagesChapitre 8 LET52MassoudreguigPas encore d'évaluation
- Correction-Exo-3-TD No-3-SMI-S1-ABDocument5 pagesCorrection-Exo-3-TD No-3-SMI-S1-ABAbdel ouameurPas encore d'évaluation
- Cours Ana Num Chapitre2Document14 pagesCours Ana Num Chapitre2Glody FwasaPas encore d'évaluation
- Transformée de Laplace ELN 3Document13 pagesTransformée de Laplace ELN 3DocPas encore d'évaluation
- Exercice 10-Série N°5 (Dynamique)Document7 pagesExercice 10-Série N°5 (Dynamique)aminemimou647Pas encore d'évaluation
- Formulaire MEF MATDocument15 pagesFormulaire MEF MATAbdelaziz KraaPas encore d'évaluation
- TD 1 SolutionDocument3 pagesTD 1 Solutionbrahim bboulebPas encore d'évaluation
- L'ntégration NumériqueDocument5 pagesL'ntégration NumériqueNasser TALL BOUBACARPas encore d'évaluation
- Résumé CinétiqueDocument11 pagesRésumé CinétiqueAB lifestylePas encore d'évaluation
- DS 4 v1 CORRIGEDocument14 pagesDS 4 v1 CORRIGEBaptiste DambrePas encore d'évaluation
- Solutions SERIE N 01 TD TCMA 2022-2023Document5 pagesSolutions SERIE N 01 TD TCMA 2022-2023Younes ChaouchePas encore d'évaluation
- MoleculeH2plusDocument5 pagesMoleculeH2plusCHEIKH ABDOUL AZIZ H'MEIDYPas encore d'évaluation
- Jet D'air Zhano 2016-2017 (16,5) - CorrigéDocument16 pagesJet D'air Zhano 2016-2017 (16,5) - CorrigéCla sher cocPas encore d'évaluation
- projet asservissementDocument15 pagesprojet asservissementagboyibo jeremiePas encore d'évaluation
- Cours de Proba 2 2 1Document16 pagesCours de Proba 2 2 1ayumihyesu2Pas encore d'évaluation
- Correction SÃrie Nâ3 2022 2023Document14 pagesCorrection SÃrie Nâ3 2022 2023rebaiahmed244Pas encore d'évaluation
- Capitre2-Bande EnergieDocument14 pagesCapitre2-Bande Energiefaiza hallakPas encore d'évaluation
- Chapitre 1, Corde Vibrante Partie 1Document5 pagesChapitre 1, Corde Vibrante Partie 1Macoc YoutubePas encore d'évaluation
- Logique Mathematique Serie Dexercices 1Document2 pagesLogique Mathematique Serie Dexercices 1saidighir94Pas encore d'évaluation
- Chapitre1 2Document36 pagesChapitre1 2Mohammed HachemiPas encore d'évaluation
- Chapitre 1 - Introduction A La Theorie Des CordesDocument16 pagesChapitre 1 - Introduction A La Theorie Des Cordesivan kikungaPas encore d'évaluation
- Series Ondes LumineusesDocument4 pagesSeries Ondes LumineusesMoulayMoulyPas encore d'évaluation
- Analyse VibratoireDocument21 pagesAnalyse VibratoireOmarPas encore d'évaluation
- Les Premiers Travaux de Jean-Pierre Vigier Sur La Théorie Des Quanta: Une Rencontre Entre Science Et Marxisme (1951-1954)Document111 pagesLes Premiers Travaux de Jean-Pierre Vigier Sur La Théorie Des Quanta: Une Rencontre Entre Science Et Marxisme (1951-1954)virgile_bessonPas encore d'évaluation
- Simulation Echangeurs Pour KarimDocument8 pagesSimulation Echangeurs Pour KarimYassine BouaichiPas encore d'évaluation
- Benosmane PDFDocument92 pagesBenosmane PDFsarah wiwiPas encore d'évaluation
- Bételgeuse - Salsa JDocument10 pagesBételgeuse - Salsa JFabien LegeronPas encore d'évaluation
- Transfert Thermique DR HADDADDocument94 pagesTransfert Thermique DR HADDADGasmi Kr100% (1)
- Chimie: Première Partie: Étude de La Pile Zinc-NickelDocument2 pagesChimie: Première Partie: Étude de La Pile Zinc-Nickelyaasir ouukesoPas encore d'évaluation
- Choix Moteur BrushlessDocument25 pagesChoix Moteur BrushlessHamza RezguiPas encore d'évaluation
- 03-Animation Prise TerreDocument15 pages03-Animation Prise TerreLinda batolaPas encore d'évaluation
- MQdec 2022Document3 pagesMQdec 2022Hicham Al FalouPas encore d'évaluation
- RDM NotationsDocument1 pageRDM Notationsbtp formationPas encore d'évaluation
- Inerie Fleche Poutre Acier AluDocument5 pagesInerie Fleche Poutre Acier AluNgouoPas encore d'évaluation
- THMOPQ - 04 Travail de Compression Adiabatique Reversible PDFDocument2 pagesTHMOPQ - 04 Travail de Compression Adiabatique Reversible PDFBertin KamsipaPas encore d'évaluation
- Etude D'Un Jet Par Un Orifice - Determination de CV : Licence 02Document4 pagesEtude D'Un Jet Par Un Orifice - Determination de CV : Licence 02Inas Dr100% (1)
- Emploi Du Temps SP 2010-11 v3Document18 pagesEmploi Du Temps SP 2010-11 v3Abdelaziz IabdallatenPas encore d'évaluation
- Leçon 1: Atome D'hydrogène Spining Et Précession Résonance Excitation Et Relaxation Génération Du Signal (FID)Document144 pagesLeçon 1: Atome D'hydrogène Spining Et Précession Résonance Excitation Et Relaxation Génération Du Signal (FID)Mohamed SeyidPas encore d'évaluation
- Aspects ÉnergéDocument3 pagesAspects ÉnergéHaraf HarafPas encore d'évaluation
- TD3 5ieme IGEDocument2 pagesTD3 5ieme IGElahbak abderrahmenePas encore d'évaluation
- Averaged Unaveraged ResultsDocument24 pagesAveraged Unaveraged ResultsKévin GuiotPas encore d'évaluation
- Instal BT ProfDocument31 pagesInstal BT ProfImmamHadramyPas encore d'évaluation
- 2 - Indice de FluiditeDocument3 pages2 - Indice de Fluiditeamani.arfaoui1991Pas encore d'évaluation
- Corrigé de L'exercice N° 1: Calcul Du Potentiel D'équilibre D'un IonDocument10 pagesCorrigé de L'exercice N° 1: Calcul Du Potentiel D'équilibre D'un IonSabo100% (1)
- Cours - Sciences Physiques Adaptation Récepteur - Générateur - 2ème Sciences (2013-2014) MR Sakhraoui Noureddine PDFDocument2 pagesCours - Sciences Physiques Adaptation Récepteur - Générateur - 2ème Sciences (2013-2014) MR Sakhraoui Noureddine PDFRAY EVOLUTIONPas encore d'évaluation
- Mesure Hydraulique PotentiometreDocument47 pagesMesure Hydraulique Potentiometreghiz-Pas encore d'évaluation
- Cours T 11 FlexionDocument7 pagesCours T 11 FlexionAbdelhak OuanzouguiPas encore d'évaluation
- Concours Doctorat UFAS 1 2019 4Document13 pagesConcours Doctorat UFAS 1 2019 4MohamedKecibaPas encore d'évaluation
- Partie Evaluations Des Ressources 15Pts Exercice 1 Pts Considère Dans L'équationDocument2 pagesPartie Evaluations Des Ressources 15Pts Exercice 1 Pts Considère Dans L'équationyvesyacinthendjoh1234Pas encore d'évaluation