Vous aimerez peut-être aussi
- Transmission PDFDocument28 pagesTransmission PDFFirass ChafaiPas encore d'évaluation
- TransmissionDocument28 pagesTransmissionzaoui MoussaPas encore d'évaluation
- EMBRAYAGEDocument9 pagesEMBRAYAGEFranky MougouePas encore d'évaluation
- Rapport Des Travaux Pratiques G1 enDocument37 pagesRapport Des Travaux Pratiques G1 enYoro Boubou SIDIBEPas encore d'évaluation
- TFE_BANZA KASONGO JUSMINE 1Document27 pagesTFE_BANZA KASONGO JUSMINE 1moise lolaPas encore d'évaluation
- Oîte de ItessesDocument32 pagesOîte de Itessesfahmy bourkabPas encore d'évaluation
- Tfe Banza Kasongo Jusmine-1Document9 pagesTfe Banza Kasongo Jusmine-1Merveil Tshinyam getPas encore d'évaluation
- Rapport TransmissionDocument13 pagesRapport TransmissionTALEB TariqPas encore d'évaluation
- TansmeteursDocument15 pagesTansmeteursMohamedChentoufPas encore d'évaluation
- Les Embrayages OtmanDocument25 pagesLes Embrayages OtmanOtman StariPas encore d'évaluation
- Exposé Sur Les Embrayages PDF Embrayage Physique Appliquée Et InterdisciplinaireDocument1 pageExposé Sur Les Embrayages PDF Embrayage Physique Appliquée Et InterdisciplinairemohamedPas encore d'évaluation
- Power Shift Twin Disc PDFDocument13 pagesPower Shift Twin Disc PDFakiPas encore d'évaluation
- La Transmission - Généralités: Fonction Du Système de TransmissionDocument2 pagesLa Transmission - Généralités: Fonction Du Système de TransmissionIdrissa MbutaPas encore d'évaluation
- Expose Sur Les Embrayages YassinDocument19 pagesExpose Sur Les Embrayages YassinYassin BarhoumiPas encore d'évaluation
- Chap3 La Boite de VitessesDocument31 pagesChap3 La Boite de VitessesDavidPas encore d'évaluation
- EmbrayagesDocument10 pagesEmbrayagesMohammed ALMUSHIAAPas encore d'évaluation
- Exposé Sur Les EmbrayagesDocument27 pagesExposé Sur Les Embrayagesoumario16100% (4)
- Boîte de Vitesses - WikipédiaDocument6 pagesBoîte de Vitesses - Wikipédiasaidhalloum7Pas encore d'évaluation
- Organes de TransmissionDocument1 pageOrganes de TransmissionFouad GattPas encore d'évaluation
- Transmission de Puissance PDFDocument17 pagesTransmission de Puissance PDFMario StiflerPas encore d'évaluation
- Transmission ManuelleDocument20 pagesTransmission ManuelleTaher Hammami100% (1)
- Cours TransmissionDocument8 pagesCours TransmissionNeoXana01100% (1)
- Boite VitesseDocument10 pagesBoite VitesseYounes SofianePas encore d'évaluation
- Embrayage Boite de VitesseDocument7 pagesEmbrayage Boite de VitesseAbdelillah Yamoul100% (1)
- Chap1 La Chaine Cinémati - CopieDocument2 pagesChap1 La Chaine Cinémati - CopieDavid100% (1)
- Turbo CompresseurDocument6 pagesTurbo CompresseurAhmedPas encore d'évaluation
- Boite VitesseDocument16 pagesBoite Vitesserabie_zitoun80% (5)
- Ltaief TransDocument9 pagesLtaief Transzouhour brahmiPas encore d'évaluation
- Module n10 La Boite de Vitesses TCVVPR OfpptDocument8 pagesModule n10 La Boite de Vitesses TCVVPR OfpptAbo OkaPas encore d'évaluation
- La Chaine CimematiqueDocument8 pagesLa Chaine CimematiqueNaounaouPas encore d'évaluation
- 1 Transformation de MouvementDocument8 pages1 Transformation de MouvementlauriaouedraogoPas encore d'évaluation
- Les Embrayages OtmanDocument16 pagesLes Embrayages Otmanhalim otmanePas encore d'évaluation
- M23-CH4 Boites de VitesseDocument13 pagesM23-CH4 Boites de VitesseAbdoul Majid YaouPas encore d'évaluation
- Etude Pompe Injection BoschDocument8 pagesEtude Pompe Injection BoschnchajaPas encore d'évaluation
- TP Transmission Corrigé3Document4 pagesTP Transmission Corrigé3ismailPas encore d'évaluation
- Projet F241Document47 pagesProjet F241pfePas encore d'évaluation
- Syst Me de TransmissionDocument3 pagesSyst Me de TransmissionMouvement pour le Rassemblement Patriotique100% (1)
- Dossier Technique Direction Assistee DIRAVIDocument12 pagesDossier Technique Direction Assistee DIRAVIDhia Cléop'art ZnaidiPas encore d'évaluation
- Ob La Chaine CinematiqueDocument2 pagesOb La Chaine CinematiqueHatem LaajiliPas encore d'évaluation
- Systeme de DirectionDocument10 pagesSysteme de Directionpapaamadou2604Pas encore d'évaluation
- Ssp133 - FR Boîte de Vitesse Automatique 01jDocument88 pagesSsp133 - FR Boîte de Vitesse Automatique 01jNinou VivanoPas encore d'évaluation
- Exposé Embrayage Groupe 1Document9 pagesExposé Embrayage Groupe 1Fréjus abimbolaPas encore d'évaluation
- Les Freins Et Les Embrayages - PrésentationDocument14 pagesLes Freins Et Les Embrayages - PrésentationHajar GhaziPas encore d'évaluation
- Techniques de Réparation MécaniqueDocument9 pagesTechniques de Réparation MécaniqueAdam Ben Hamouda100% (2)
- Dossier Technique Sur Le Fonctionnement Du VariateurDocument6 pagesDossier Technique Sur Le Fonctionnement Du VariateurmllpoijPas encore d'évaluation
- Expose Accouplement TemporaireDocument37 pagesExpose Accouplement TemporaireSteven Thierry NgoualaPas encore d'évaluation
- Fonctionnement Dune Boite de VitessesDocument3 pagesFonctionnement Dune Boite de VitessesRossi -روسيPas encore d'évaluation
- MD3060P5, RET-TMD - Fre - 01 - 191977 PDFDocument2 pagesMD3060P5, RET-TMD - Fre - 01 - 191977 PDFOlivier Ischi100% (1)
- Résumé Module Transmission TSDEEDocument9 pagesRésumé Module Transmission TSDEEYoussef EssemlaliPas encore d'évaluation
- ReducteurDocument3 pagesReducteurAyman HachchanePas encore d'évaluation
- Les Boite de VitesseDocument13 pagesLes Boite de VitesseOumar Sissoko67% (3)
- SYSTEME DatyDocument12 pagesSYSTEME Datyjebokawhi308Pas encore d'évaluation
- Massey Ferguson Dyna VT PDFDocument8 pagesMassey Ferguson Dyna VT PDFLucas PerronePas encore d'évaluation
- Direction Crémaillère Traditionnelle Et AssistéeDocument29 pagesDirection Crémaillère Traditionnelle Et AssistéeAdama KonatePas encore d'évaluation
- Partie Mecanique Frein Graisseur Boudin Rames z2m Cours DumDocument29 pagesPartie Mecanique Frein Graisseur Boudin Rames z2m Cours DumAbdou Benziane50% (2)
- Comment construire son drone de zéro: Comment construire son drone et dimensionner les différentes partiesD'EverandComment construire son drone de zéro: Comment construire son drone et dimensionner les différentes partiesÉvaluation : 2 sur 5 étoiles2/5 (1)
- Windvane Report: Régulateurs d'allure, un voyage à travers le tempsD'EverandWindvane Report: Régulateurs d'allure, un voyage à travers le tempsPas encore d'évaluation
- A25g FreinDocument12 pagesA25g FreinGégé di TPPas encore d'évaluation
- Essai Origines Jujitsu Belgique PDFDocument13 pagesEssai Origines Jujitsu Belgique PDFChristianAitoPas encore d'évaluation
- CEVAP ANHTRIDocument1 pageCEVAP ANHTRItuksaltopraksanPas encore d'évaluation
- Expression Écrite Les InvitationsDocument2 pagesExpression Écrite Les InvitationsrichardPas encore d'évaluation
- Clé D'activation Office 2007 Home and StudentDocument1 pageClé D'activation Office 2007 Home and Studentvalvalvalval80% (15)
- Schema Presse Et Pressicc: Z.I Saint-Joseph BP 221 - 04102 MANOSQUE Cedex Tél:04.92.72.52.53-Fax:04.92.87.60.48Document16 pagesSchema Presse Et Pressicc: Z.I Saint-Joseph BP 221 - 04102 MANOSQUE Cedex Tél:04.92.72.52.53-Fax:04.92.87.60.48hiba elouajdiPas encore d'évaluation
- OoT Medley Rebar - 003 OcarinaDocument2 pagesOoT Medley Rebar - 003 OcarinaRemington86Pas encore d'évaluation
- 3316 PDFDocument24 pages3316 PDFPDF JournalPas encore d'évaluation
- Semi Marathon de Chartres SITRANS 17/03/2024: Classement GénéralDocument53 pagesSemi Marathon de Chartres SITRANS 17/03/2024: Classement GénéralStéphanie ZEIMETPas encore d'évaluation
- Nivel Básico: Prueba de CertificaciónDocument3 pagesNivel Básico: Prueba de CertificaciónArantxa Ormazabal TelleriaPas encore d'évaluation
- CriteresnoirDocument5 pagesCriteresnoirapi-220728663Pas encore d'évaluation
- Frequences Des Chaines NUMERICABLEsDocument2 pagesFrequences Des Chaines NUMERICABLEsMed Denfil100% (5)
- 20210915083545Z Groupes ComptaDocument4 pages20210915083545Z Groupes ComptaNancy ThônePas encore d'évaluation
- Super Mario World - Ending ThemeDocument9 pagesSuper Mario World - Ending ThemeDawn0% (1)
- Vérins HydrauliquesDocument9 pagesVérins HydrauliquesJean Pierre GaudillierPas encore d'évaluation
- Chapitre1 PDFDocument27 pagesChapitre1 PDFBouhadouPas encore d'évaluation
- Guide DaikidoDocument45 pagesGuide DaikidoK SPas encore d'évaluation
- Bassai Sho BunkaiDocument21 pagesBassai Sho BunkaiBernard Barès100% (1)
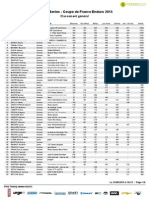
- Enduro Series - Coupe de France Enduro 2015Document6 pagesEnduro Series - Coupe de France Enduro 2015Quentin Chevat Enduro TribePas encore d'évaluation
- Dance With Mandolins - Romeo and Juliet (Sergej Prokofiev)Document5 pagesDance With Mandolins - Romeo and Juliet (Sergej Prokofiev)Antonucci Maria GraziaPas encore d'évaluation
- TD Physique Exercices MéthodologiquesDocument3 pagesTD Physique Exercices MéthodologiquesAirb expPas encore d'évaluation
- Télécharger Examen Avec Corrigé N°2 de Module ALGEBRE 4 (Réduction Des Endomorphismes Et Applications) SMIA S3 PDFDocument2 pagesTélécharger Examen Avec Corrigé N°2 de Module ALGEBRE 4 (Réduction Des Endomorphismes Et Applications) SMIA S3 PDFUriel JohnsonPas encore d'évaluation
- 2925 PDFDocument26 pages2925 PDFPDF JournalPas encore d'évaluation
- Mike Stern Tumble - Home PDFDocument10 pagesMike Stern Tumble - Home PDFКондратьев МихаилPas encore d'évaluation
- QuiDocument1 pageQuiЛюдмила СаградіянPas encore d'évaluation
- Série de TD 07: Exercice 01: Questionnaire À Choix MultiplesDocument1 pageSérie de TD 07: Exercice 01: Questionnaire À Choix MultiplesDJAZOULI ADELPas encore d'évaluation
- Les Objets Roulants Fabrication D Une Charrette Et D Une VoitureDocument5 pagesLes Objets Roulants Fabrication D Une Charrette Et D Une VoitureALODEPas encore d'évaluation
- Grade - Porque Ele ViveDocument2 pagesGrade - Porque Ele ViveCleiton SantosPas encore d'évaluation
- Le Portrait ChinoisDocument23 pagesLe Portrait ChinoisYENNI CATALINA SÁNCHEZ BEDOYAPas encore d'évaluation
- Emploi Du Temps Automne 2022 2023 MIP S1 V2Document3 pagesEmploi Du Temps Automne 2022 2023 MIP S1 V2KHALDI KHALIDPas encore d'évaluation