Vous aimerez peut-être aussi
- Annales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésD'EverandAnnales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- TD 12 Corrigé - Cinématique Graphique - CIR Et ÉquiprojectivitéDocument13 pagesTD 12 Corrigé - Cinématique Graphique - CIR Et Équiprojectivitéimaha9286% (7)
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
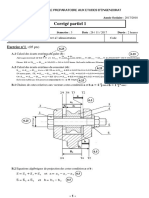
- Corrigé Partiel 1-2018Document4 pagesCorrigé Partiel 1-2018Ramdane BoulahiaPas encore d'évaluation
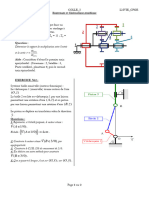
- Examen de Synthèse de Mécanique Du SolideDocument3 pagesExamen de Synthèse de Mécanique Du SolideMESSAOUI0% (1)
- TD 09 - Cinématique Analytique - Dérivation VectorielleDocument3 pagesTD 09 - Cinématique Analytique - Dérivation VectoriellemoulyPas encore d'évaluation
- TD 20 - Lois Entrée-Sortie en Position Et en VitesseDocument10 pagesTD 20 - Lois Entrée-Sortie en Position Et en Vitessebhs channelPas encore d'évaluation
- TD CinematiqueDocument5 pagesTD Cinematiquebenchara100% (1)
- Ci02td 2Document5 pagesCi02td 2Samy BoujihaPas encore d'évaluation
- TD 22 Corrigé - Loi E-S Pour Les Réducteurs Et Multiplicateurs de Vitesse À Train ÉpicycloïdalDocument10 pagesTD 22 Corrigé - Loi E-S Pour Les Réducteurs Et Multiplicateurs de Vitesse À Train ÉpicycloïdalStephVitch50% (2)
- TD Synthc3a8seDocument7 pagesTD Synthc3a8sejawahermohamed.maPas encore d'évaluation
- Colle 5 Tsi Csi en Cg7Document2 pagesColle 5 Tsi Csi en Cg7yasser bhPas encore d'évaluation
- TD 11 - Cinématique Graphique - Composition Des Vecteurs VitessesDocument4 pagesTD 11 - Cinématique Graphique - Composition Des Vecteurs Vitessesmouly100% (1)
- CINEMATIQUE GRAPHIQUE Preparation 214 PDFDocument10 pagesCINEMATIQUE GRAPHIQUE Preparation 214 PDFYoussef RachidPas encore d'évaluation
- Examen MEF 2008 PDFDocument5 pagesExamen MEF 2008 PDFMohammed Mammar KouadriPas encore d'évaluation
- CNC 2020 GM TSIDocument13 pagesCNC 2020 GM TSIKamal PcPas encore d'évaluation
- Examens National 2bac STM Sci Ingen 2013 N PDFDocument28 pagesExamens National 2bac STM Sci Ingen 2013 N PDFHanane TounsiPas encore d'évaluation
- BAC 2013 SI Normale STM PDFDocument18 pagesBAC 2013 SI Normale STM PDFyassine yazidiPas encore d'évaluation
- Colle 5 Tsi Csi en CG4Document2 pagesColle 5 Tsi Csi en CG4yasser bhPas encore d'évaluation
- Chap4 leçoc 3 transformation bielle manivelle 4Tech-12Document12 pagesChap4 leçoc 3 transformation bielle manivelle 4Tech-12ezzinePas encore d'évaluation
- Ds de Mecanique: Nom: Prenom: Classe: NoteDocument6 pagesDs de Mecanique: Nom: Prenom: Classe: NoteertetrPas encore d'évaluation
- Travaux Pratiques Electronique NumériqueDocument10 pagesTravaux Pratiques Electronique NumériqueOumaima RhayaPas encore d'évaluation
- TD 3: Champ Des Vecteurs Vitesses Des Points D'un Solide: Mécanique: CinématiqueDocument1 pageTD 3: Champ Des Vecteurs Vitesses Des Points D'un Solide: Mécanique: CinématiqueANDAHMOU SoulaimanPas encore d'évaluation
- TP de ReseauDocument12 pagesTP de Reseaumahdjoub addaPas encore d'évaluation
- TSI3 ModelisationDocument12 pagesTSI3 Modelisationlouna yunaPas encore d'évaluation
- TDDocument6 pagesTDYassir Ez-znafryPas encore d'évaluation
- TD20 - Train Epicycloidal - Sujet PDFDocument5 pagesTD20 - Train Epicycloidal - Sujet PDFTafotchin Kone100% (1)
- Rapport Circuit Electrique-1Document11 pagesRapport Circuit Electrique-1Ahmad OuedraogoPas encore d'évaluation
- 2013 Normale Sujet PDFDocument19 pages2013 Normale Sujet PDFGuiliassPas encore d'évaluation
- TD2 - Cine - 2017 18Document4 pagesTD2 - Cine - 2017 18Wael YossraPas encore d'évaluation
- Résumé Elec BacDocument29 pagesRésumé Elec BacFethi BenmassoudePas encore d'évaluation
- Corrigé TD2 Automatisme 2020 3ex 2pbDocument8 pagesCorrigé TD2 Automatisme 2020 3ex 2pbMidoxotkPas encore d'évaluation
- Page 1 ExercDocument1 pagePage 1 ExercMohammed Amine BaguiPas encore d'évaluation
- PDF ExercicesDocument13 pagesPDF ExercicesSaad EttahiriPas encore d'évaluation
- Ouvre PortailDocument2 pagesOuvre PortailMarie-Aude LF0% (1)
- CI03 TD09 Sujet - Modéliser Le Comportement Cinématique Des Trains ÉpicycloïdauxDocument6 pagesCI03 TD09 Sujet - Modéliser Le Comportement Cinématique Des Trains ÉpicycloïdauxIsmail El MoufakirPas encore d'évaluation
- TD2 2-BooleDocument2 pagesTD2 2-BooleThe geek CuestaPas encore d'évaluation
- Feuille n1 MecanismesDocument4 pagesFeuille n1 MecanismesntabPas encore d'évaluation
- Revision Generale D Electronique PDFDocument34 pagesRevision Generale D Electronique PDFHamzaStahiPas encore d'évaluation
- TD1 Logique FloueDocument8 pagesTD1 Logique FloueBrahim Gasbaoui100% (1)
- Mécanique Du PingDocument2 pagesMécanique Du Pingfatma niangPas encore d'évaluation
- BouzitetAmeur CFM2009Document7 pagesBouzitetAmeur CFM2009Inass ELHAOUARIPas encore d'évaluation
- Pfiojgzerj R Eugj NuoighjnggggggggggggggggggggggggDocument6 pagesPfiojgzerj R Eugj Nuoighjnggggggggggggggggggggggggyeyeye100% (1)
- MUF141231Document5 pagesMUF141231Big. Gaumont (Big.G)Pas encore d'évaluation
- DS2 3 Tech 18 Mars 2024 Mr R JallouliDocument5 pagesDS2 3 Tech 18 Mars 2024 Mr R JallouliRafek JallouliPas encore d'évaluation
- TD MVT Plan - Portail - Prof - 2021-1Document4 pagesTD MVT Plan - Portail - Prof - 2021-1Dan CheridanPas encore d'évaluation
- HA0503 CorrigeDocument4 pagesHA0503 CorrigeAnonymous LZQTDsB95APas encore d'évaluation
- Examen Mcanique Gnrale 1GM Iset Nabeul Janvier 2011Document5 pagesExamen Mcanique Gnrale 1GM Iset Nabeul Janvier 2011Ahmed SoltaniPas encore d'évaluation
- Examen Mcanique Gnrale 1GM Iset Nabeul Janvier 2011Document5 pagesExamen Mcanique Gnrale 1GM Iset Nabeul Janvier 2011Ahmed SoltaniPas encore d'évaluation
- Examen Mcanique Gnrale 1GM Iset Nabeul Janvier 2011Document5 pagesExamen Mcanique Gnrale 1GM Iset Nabeul Janvier 2011Ahmed SoltaniPas encore d'évaluation
- TDDocument5 pagesTDYassir Ez-znafry100% (1)
- Semestre 2 DS 4 2007-2008 Robot RRTDocument7 pagesSemestre 2 DS 4 2007-2008 Robot RRTLarbi ElbakkaliPas encore d'évaluation
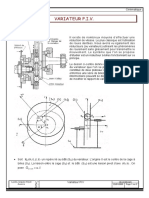
- Cisvariateurpiv PDFDocument2 pagesCisvariateurpiv PDFdjalikadjouPas encore d'évaluation
- Cinématique Colle 1Document3 pagesCinématique Colle 1elkhouddar yassinePas encore d'évaluation
- CAM - Méc de Trans. de MVTDocument33 pagesCAM - Méc de Trans. de MVTMoslem ZariatPas encore d'évaluation
- LIFASR3 TD3 CorDocument5 pagesLIFASR3 TD3 CorIbtissem DERRARPas encore d'évaluation
- CI02 TD03 Sujet - Interpréter Un Schéma CinématiqueDocument3 pagesCI02 TD03 Sujet - Interpréter Un Schéma CinématiqueKhaled JberiPas encore d'évaluation
- Devoir de Contrôle N°1 2015 2016 (MR Yousfi Kamel)Document4 pagesDevoir de Contrôle N°1 2015 2016 (MR Yousfi Kamel)Chaimae SaadiPas encore d'évaluation
- Eléments de Corrigé - DS2 - 1TSI3 - 23-24 - VFDocument4 pagesEléments de Corrigé - DS2 - 1TSI3 - 23-24 - VFyasser bhPas encore d'évaluation
- Colle 7 Tsi PFS 2Document1 pageColle 7 Tsi PFS 2yasser bhPas encore d'évaluation
- Le MarocDocument1 pageLe Marocyasser bhPas encore d'évaluation
- Pfe Widad 2Document41 pagesPfe Widad 2yasser bhPas encore d'évaluation
- Pfe Widad 2Document41 pagesPfe Widad 2yasser bhPas encore d'évaluation
- TD2 DynamiqueDocument3 pagesTD2 Dynamiqueyasser bhPas encore d'évaluation
- Programme Iscae Et MasterDocument7 pagesProgramme Iscae Et Masteryasser bhPas encore d'évaluation
- DTL Filtre Actifs CorrigéDocument6 pagesDTL Filtre Actifs Corrigéyasser bhPas encore d'évaluation