Vous aimerez peut-être aussi
- TD Statique CinématiqueDocument5 pagesTD Statique CinématiqueAhmed fattoumPas encore d'évaluation
- Cinematique Ex2004Document16 pagesCinematique Ex2004Larbi Elbakkali100% (1)
- Mécanique de Solide - TDDocument12 pagesMécanique de Solide - TDMoùm Mèd'Pas encore d'évaluation
- Torseur Cinematique Liaison UsuelleDocument1 pageTorseur Cinematique Liaison UsuelleSaid H-djo0% (1)
- TD 12 Corrigé - Cinématique Graphique - CIR Et ÉquiprojectivitéDocument13 pagesTD 12 Corrigé - Cinématique Graphique - CIR Et Équiprojectivitéimaha9286% (7)
- 04.1 TD N 1 Centre D Inertie Aire VolumeDocument9 pages04.1 TD N 1 Centre D Inertie Aire VolumeYahya Elamrani50% (2)
- Corrigé de L'examen de SynthèseDocument2 pagesCorrigé de L'examen de SynthèseMESSAOUI100% (3)
- TD 20 - Lois Entrée-Sortie en Position Et en VitesseDocument10 pagesTD 20 - Lois Entrée-Sortie en Position Et en Vitessebhs channelPas encore d'évaluation
- TD Serie1Document4 pagesTD Serie1Anouar Donald Cobain67% (3)
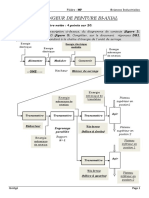
- Melangeur de Peinture Bi-AxialDocument18 pagesMelangeur de Peinture Bi-AxialBalalaŇaŖîfPas encore d'évaluation
- TD - Cinématique SolideDocument3 pagesTD - Cinématique SolideAbdelkhalekBenOmarPas encore d'évaluation
- TD 24 - Comportement Statique Des SystèmesDocument8 pagesTD 24 - Comportement Statique Des Systèmesbhs channel50% (2)
- Corrigé TD 15 - Liaisons - Schéma CinématiqueDocument6 pagesCorrigé TD 15 - Liaisons - Schéma Cinématiquebhs channelPas encore d'évaluation
- Regulateur WattDocument2 pagesRegulateur WattAmara Neji83% (6)
- Exercices Mecanique GeneraleDocument295 pagesExercices Mecanique GeneraleSalah-eddine ZitiPas encore d'évaluation
- Corrigé TD 10 - Comportement Cinématique Des SystèmesDocument5 pagesCorrigé TD 10 - Comportement Cinématique Des Systèmesbhs channelPas encore d'évaluation
- Max PIDDocument19 pagesMax PIDmarinmikaelPas encore d'évaluation
- Exercices Mécanique GénéraleDocument295 pagesExercices Mécanique GénéraleAmira Zarglayoun100% (6)
- TD Cinématique CHARIOT FILOGUIDEDocument4 pagesTD Cinématique CHARIOT FILOGUIDELamia Achour Ep Zanned100% (3)
- Corrigé TD 21 - Comportement Statique Des SystèmesDocument7 pagesCorrigé TD 21 - Comportement Statique Des Systèmesbhs channel100% (1)
- Résumé Mécanique Du Solide (Tensorielle)Document18 pagesRésumé Mécanique Du Solide (Tensorielle)باسم الجراية100% (1)
- "Examen" de Mécanique Des Solides Indéformables: Responsable Du Module: PR H. Ait RimouchDocument3 pages"Examen" de Mécanique Des Solides Indéformables: Responsable Du Module: PR H. Ait RimouchAlexis James0% (1)
- Theoremes Generaux PDFDocument37 pagesTheoremes Generaux PDFAyoub Hwité100% (1)
- MecaniqueDocument35 pagesMecaniquejiren0% (1)
- TD1 PFS 17 18Document4 pagesTD1 PFS 17 18Yassine Bouchatta50% (2)
- Chapitre 3 - Schema Cinematique - 1er STDocument25 pagesChapitre 3 - Schema Cinematique - 1er STYДSSДMiNЭ NДRCISSЭ100% (1)
- Corr SUP TD CIN PSDocument2 pagesCorr SUP TD CIN PSSafae SabirPas encore d'évaluation
- TD 20 Corrigé - Loi Entrée-Sortie À L'aide D'un Produit Scalaire Constant de Deux Vecteurs D'orientationDocument6 pagesTD 20 Corrigé - Loi Entrée-Sortie À L'aide D'un Produit Scalaire Constant de Deux Vecteurs D'orientationMönsîeur Abd NourPas encore d'évaluation
- Poly Théorie Des MécanismesDocument24 pagesPoly Théorie Des MécanismesJaksMaksPas encore d'évaluation
- Chapitre Torseur 200928Document25 pagesChapitre Torseur 200928fatou100% (1)
- 5 Schemas Cinematiques CorrigesDocument5 pages5 Schemas Cinematiques Corrigessamir ghebouliPas encore d'évaluation
- Cinematique Du Solide PDFDocument60 pagesCinematique Du Solide PDFSameh Oussama100% (5)
- TD 10 - Cinmatique Analytique - Composition Des Vecteurs Vitesses Et Champ Des Vecteurs VitessesDocument4 pagesTD 10 - Cinmatique Analytique - Composition Des Vecteurs Vitesses Et Champ Des Vecteurs VitessesZarroui Abdellah0% (1)
- Ci02td 2Document5 pagesCi02td 2Samy BoujihaPas encore d'évaluation
- Sujets de Méca Géné 2009Document110 pagesSujets de Méca Géné 2009souheil_sou100% (4)
- TD 13 - Comportement Cinématique Des SystèmesDocument9 pagesTD 13 - Comportement Cinématique Des Systèmesbhs channelPas encore d'évaluation
- Cours Theorie Des Mecanismes PDFDocument12 pagesCours Theorie Des Mecanismes PDFmaraghni_hassine7592100% (2)
- TD 08 - Calcul VectorielDocument4 pagesTD 08 - Calcul Vectorielbhs channelPas encore d'évaluation
- Mac Application Torseur 2Document1 pageMac Application Torseur 2Bilel LaamiriPas encore d'évaluation
- Courbes de BézierDocument17 pagesCourbes de BézierAl CasPas encore d'évaluation
- 2019-Mp-Feuille de TD de DynamiqueDocument9 pages2019-Mp-Feuille de TD de DynamiqueAyman BenamerPas encore d'évaluation
- TD 19 - Loi Entrée-Sortie Par Fermeture CinématiqueDocument4 pagesTD 19 - Loi Entrée-Sortie Par Fermeture CinématiqueDrisse Achar60% (5)
- 03 Cours Le Schema CinematiqueDocument7 pages03 Cours Le Schema CinematiqueMohammed El azhariPas encore d'évaluation
- TD 3 CinemaTiqueDocument15 pagesTD 3 CinemaTiqueMohamed OuladPas encore d'évaluation
- TD de Mécanique AnalytiqueDocument48 pagesTD de Mécanique AnalytiqueMahfoud Zaki90% (10)
- Cours Mécanique Des FluidesDocument42 pagesCours Mécanique Des FluidesSaad IhbPas encore d'évaluation
- COURS Théorie Des Mécanismes PDFDocument5 pagesCOURS Théorie Des Mécanismes PDFMohamed Naciri100% (1)
- GM DS9-2013 CorrigéDocument4 pagesGM DS9-2013 CorrigéGray AbPas encore d'évaluation
- Serie1 MADocument3 pagesSerie1 MAHocine HohoPas encore d'évaluation
- Colle - 1 - CorrectionDocument4 pagesColle - 1 - CorrectionAbdelali YacoubiPas encore d'évaluation
- Modélisation Cinématique Des MécanismesDocument8 pagesModélisation Cinématique Des MécanismesmounirgemPas encore d'évaluation
- Chapitres 1 Les LiaisonsDocument15 pagesChapitres 1 Les LiaisonsmohchouPas encore d'évaluation
- Mecanismes PDFDocument34 pagesMecanismes PDFesloch50% (2)
- Chap3 Cinematique Du Solide OkDocument16 pagesChap3 Cinematique Du Solide OkmatozoPas encore d'évaluation
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- Chapitre4 AlgebreS1Document21 pagesChapitre4 AlgebreS1Salah MoulakatPas encore d'évaluation
- Troupeau-Le Traité Sur La TrinitéDocument20 pagesTroupeau-Le Traité Sur La TrinitéHammadi HabadPas encore d'évaluation
- PDF Translator 1690979409622Document72 pagesPDF Translator 1690979409622Stephane KABOREPas encore d'évaluation
- Hypnose Ericksonienne Communication Engageante Persuasive Infuence Psychologie Sociale Persuasion Jean Touati Orgadia PDFDocument11 pagesHypnose Ericksonienne Communication Engageante Persuasive Infuence Psychologie Sociale Persuasion Jean Touati Orgadia PDFNas FartasPas encore d'évaluation
- Poly Si MeriseDocument112 pagesPoly Si MeriseZaid ZizouPas encore d'évaluation
- Identité Meurtrières-3Document2 pagesIdentité Meurtrières-3Alexa VázquezPas encore d'évaluation
- Phi-1110 A19 87853Document11 pagesPhi-1110 A19 87853marlenezogo8Pas encore d'évaluation
- Valeur Test Critere de Caracterisation StatistiqueDocument7 pagesValeur Test Critere de Caracterisation StatistiqueJuan SimpertiguePas encore d'évaluation
- Antécédent (Grammaire)Document2 pagesAntécédent (Grammaire)Evariste GbedoyesiaPas encore d'évaluation
- Eda Baci Ped 3757Document4 pagesEda Baci Ped 3757api-371465708Pas encore d'évaluation
- Cours Terminologie Scientifique Et Expression Écrite Et OraleDocument8 pagesCours Terminologie Scientifique Et Expression Écrite Et OraleSAHRA YOUPas encore d'évaluation
- Guide Confiance en SoiDocument13 pagesGuide Confiance en SoiLuisPas encore d'évaluation
- Marx Et Le Marxisme Une Pensee Une Histoire PDFDocument161 pagesMarx Et Le Marxisme Une Pensee Une Histoire PDFhugueseap100% (1)
- Se Conhecesses o Dom de DeusDocument1 pageSe Conhecesses o Dom de Deusaggathaestrela100% (3)
- Ma PhilosophieDocument4 pagesMa PhilosophieAmina OusaidPas encore d'évaluation
- 3.1 Charge Décharge C ExaoDocument3 pages3.1 Charge Décharge C ExaoYa HiaPas encore d'évaluation
- Encyclopédie de La Gestion Et Du ManagementDocument315 pagesEncyclopédie de La Gestion Et Du ManagementSafa Fessi50% (2)
- Tendances Principales D e La Recherche Dans Les Sciences Sociales Et HumainesDocument1 034 pagesTendances Principales D e La Recherche Dans Les Sciences Sociales Et HumainesfenomenotextesPas encore d'évaluation
- Trouver Le Plaisir D Enseigner Et D ApprendreDocument6 pagesTrouver Le Plaisir D Enseigner Et D ApprendreStukinePas encore d'évaluation
- Anthropologie Chez ST Augustin Et L'anthrolopogie MédiévaleDocument4 pagesAnthropologie Chez ST Augustin Et L'anthrolopogie MédiévaleBenjamin MilordPas encore d'évaluation
- ABÉLÈS, Marc e JEUDY, Henri P - Anthropologie Du PolitiqueDocument35 pagesABÉLÈS, Marc e JEUDY, Henri P - Anthropologie Du Politiquesergio tavaresPas encore d'évaluation