Vous aimerez peut-être aussi
- TP N°2: Etude Des Caractéristiques D'un Moteur Asynchrone Triphasé À CageDocument4 pagesTP N°2: Etude Des Caractéristiques D'un Moteur Asynchrone Triphasé À CageBrandy Odonnell100% (5)
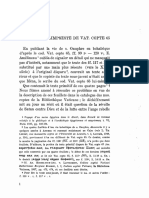
- Lantschoot, Arnold Van. Un Texte Palimpseste de Vat. Copte 65, Muséon 60 (1947), 261-268Document8 pagesLantschoot, Arnold Van. Un Texte Palimpseste de Vat. Copte 65, Muséon 60 (1947), 261-268yadatanPas encore d'évaluation
- Comptabilité Des CliniquesDocument47 pagesComptabilité Des CliniquesAnonymous kAVA6ALXNPas encore d'évaluation
- SULZER Pump WiringDocument1 pageSULZER Pump WiringYahya GharbiPas encore d'évaluation
- TP 5 Etude Alternateur TriphaseDocument10 pagesTP 5 Etude Alternateur Triphaseomar ballalouPas encore d'évaluation
- Manipulation TP N2 Equipements Industriels Ok 2Document5 pagesManipulation TP N2 Equipements Industriels Ok 2drareniiyacinePas encore d'évaluation
- CturbineDocument33 pagesCturbineza3amPas encore d'évaluation
- CcompresseurDocument35 pagesCcompresseurKader MilanoPas encore d'évaluation
- Démarrage Moteur Asynchrone TriphaséDocument20 pagesDémarrage Moteur Asynchrone TriphaséProf St100% (1)
- Démarrage Des Moteurs AsynchronesDocument91 pagesDémarrage Des Moteurs Asynchronesyassin akkninnPas encore d'évaluation
- Commande-Machine4Document53 pagesCommande-Machine4med chemkhiPas encore d'évaluation
- Hanane TPPDocument10 pagesHanane TPPCarmen DelrPas encore d'évaluation
- Cours PSP M.KechidaDocument23 pagesCours PSP M.KechidaSalah DegdouguePas encore d'évaluation
- TP 5 Etude Alternateur TriphaseDocument10 pagesTP 5 Etude Alternateur Triphaseomar ballalouPas encore d'évaluation
- Devoir de Contrôle N°3 2009 2010 (Ibn Rachiq Ezzahra)Document10 pagesDevoir de Contrôle N°3 2009 2010 (Ibn Rachiq Ezzahra)Manu CocoPas encore d'évaluation
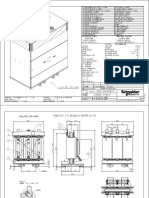
- Trihal - REFCOMM - 1600kVA - 20 KV - ECO21 - 100 - 912297 - Rev0Document4 pagesTrihal - REFCOMM - 1600kVA - 20 KV - ECO21 - 100 - 912297 - Rev0Anonymous 1AAjd0Pas encore d'évaluation
- Trihal - REFCOMM - 3150kVA - 20 KV - ECO21 - 100 - 912300 - Rev0Document4 pagesTrihal - REFCOMM - 3150kVA - 20 KV - ECO21 - 100 - 912300 - Rev0Anonymous 1AAjd0Pas encore d'évaluation
- Le Moteur AsynchroneDocument7 pagesLe Moteur AsynchroneÉlément InstablePas encore d'évaluation
- Fiche Technique Temporisteur - Exemple A1-A2 B1Document4 pagesFiche Technique Temporisteur - Exemple A1-A2 B1chaabiabdeljalilPas encore d'évaluation
- Ventilador forzadoVF A2E200-AF05-15 01821989Document2 pagesVentilador forzadoVF A2E200-AF05-15 01821989Vilma FloresPas encore d'évaluation
- Moteur AsynchroneDocument47 pagesMoteur AsynchronehmakPas encore d'évaluation
- Moteur AsynchroneDocument11 pagesMoteur AsynchroneStéfan SalvatorePas encore d'évaluation
- CHAUFFE ÉLECTRIQUE (Complément)Document10 pagesCHAUFFE ÉLECTRIQUE (Complément)AbdellahPas encore d'évaluation
- Devoir Corrigé de Contrôle N°2 - Génie Mécanique Emmeteur Terrestre (Support Orientable) - Bac Technique (2013-2014) MR Ben Abdallah Marouan PDFDocument15 pagesDevoir Corrigé de Contrôle N°2 - Génie Mécanique Emmeteur Terrestre (Support Orientable) - Bac Technique (2013-2014) MR Ben Abdallah Marouan PDFabdelbasset11Pas encore d'évaluation
- Resume Transfo Isge Avril 2023Document70 pagesResume Transfo Isge Avril 2023THONYPas encore d'évaluation
- theme2_ventilationDocument7 pagestheme2_ventilationgirardPas encore d'évaluation
- ENERGIE POUR LE POMPAGE D'EAU. (Imprimer)Document44 pagesENERGIE POUR LE POMPAGE D'EAU. (Imprimer)Kientega AboubakarPas encore d'évaluation
- DemarrageDocument6 pagesDemarragekololoPas encore d'évaluation
- 05 - Tourelles (Notice) - ALDES - VELONE 10.5 - 4T 1.5kWDocument8 pages05 - Tourelles (Notice) - ALDES - VELONE 10.5 - 4T 1.5kWghjkfPas encore d'évaluation
- 080 - Plan Schema Armoire H0007783 0Document1 page080 - Plan Schema Armoire H0007783 0Abdullah FazilPas encore d'évaluation
- 1-Aop en Regime Non LineaireDocument13 pages1-Aop en Regime Non LineaireChrist-Regis KossonouPas encore d'évaluation
- Electronique Et Loisirs Magazine N - 06 PDFDocument96 pagesElectronique Et Loisirs Magazine N - 06 PDFCleber CostaPas encore d'évaluation
- TP 5Document2 pagesTP 5Khaled AmriPas encore d'évaluation
- Code 68 Ep16ntDocument2 pagesCode 68 Ep16ntMamadou Djibril BaPas encore d'évaluation
- INTORQ BFK458 FRDocument32 pagesINTORQ BFK458 FRMahmoud AlswisyPas encore d'évaluation
- Moteur AsynchroneDocument18 pagesMoteur AsynchroneAnonymous 6VBmiJQ7MPas encore d'évaluation
- Da24v Cpeva PDFDocument8 pagesDa24v Cpeva PDFencotronic100% (1)
- LTM 1090/2 - Tourelle OW-04: Couronne D'orientation À Rouleaux (ROD)Document8 pagesLTM 1090/2 - Tourelle OW-04: Couronne D'orientation À Rouleaux (ROD)ncirPas encore d'évaluation
- S1 Dev1 Etk TF3 07122023Document3 pagesS1 Dev1 Etk TF3 07122023Daouda OUEDRAOGOPas encore d'évaluation
- 2 Généralité Sur Le MAS TriphaséDocument4 pages2 Généralité Sur Le MAS TriphaséRey divino MoukouaPas encore d'évaluation
- Rapport Alternateur (Autosaved) (Recovered)Document22 pagesRapport Alternateur (Autosaved) (Recovered)RabbiPas encore d'évaluation
- DS3 REG 2006 2007fini (DT)Document6 pagesDS3 REG 2006 2007fini (DT)Moh BraberPas encore d'évaluation
- Le Moteur AsynchroneDocument99 pagesLe Moteur AsynchroneBrahimkafing AnamaPas encore d'évaluation
- Synchrone PDFDocument5 pagesSynchrone PDFmoipopPas encore d'évaluation
- TD MS AutopiloteDocument4 pagesTD MS AutopiloteESSADIKE ZAITAPas encore d'évaluation
- Plan Manoeuvre Électrique (Entrées) BURON - GABON - Ed1Document1 pagePlan Manoeuvre Électrique (Entrées) BURON - GABON - Ed1badmang-wo-mecaPas encore d'évaluation
- Manip Seq Bascule Anti Rebond.i1355Document1 pageManip Seq Bascule Anti Rebond.i1355Eya GuedriaPas encore d'évaluation
- 009 Turbines VapeurDocument23 pages009 Turbines Vapeurnesrine louahemPas encore d'évaluation
- Machine Asynchrone TriphaséeDocument26 pagesMachine Asynchrone TriphaséekeylogPas encore d'évaluation
- TP 3 SchemaDocument5 pagesTP 3 SchemaYahiyaoui SofyanePas encore d'évaluation
- KKKKKKKKKKDocument4 pagesKKKKKKKKKKAbderrahmane WardiPas encore d'évaluation
- 39557-430-01 - A Carnet Cables PC WordDocument11 pages39557-430-01 - A Carnet Cables PC WordAyouba AoutaPas encore d'évaluation
- Les Recepteurs TriphasesDocument7 pagesLes Recepteurs TriphasesSalh JerPas encore d'évaluation
- Dossier de Technologie de Construction Mécanique 2Document50 pagesDossier de Technologie de Construction Mécanique 2ahmed100% (2)
- Devoir de Synthèse N°3 - Génie Mécanique - Bac Technique (2011-2012) MR Ben Slimen PDFDocument5 pagesDevoir de Synthèse N°3 - Génie Mécanique - Bac Technique (2011-2012) MR Ben Slimen PDFkhocine0% (1)
- Devoir de Synthèse N°3 - Génie Mécanique - Bac Technique (2011-2012) MR Ben Slimen PDFDocument5 pagesDevoir de Synthèse N°3 - Génie Mécanique - Bac Technique (2011-2012) MR Ben Slimen PDFkhocinePas encore d'évaluation
- 1500W GammeDocument4 pages1500W GammekankeuPas encore d'évaluation
- TPN°2 Transformateur Mono 2023Document8 pagesTPN°2 Transformateur Mono 2023mustapha aPas encore d'évaluation
- Machines AsynchronesDocument6 pagesMachines AsynchronesToon Man100% (1)
- Catalogue SneDocument144 pagesCatalogue Sneila reehasPas encore d'évaluation
- SubnettingDocument19 pagesSubnettingtunisianouPas encore d'évaluation
- Yadh Ben AchourDocument26 pagesYadh Ben AchourIsmail SadaouiPas encore d'évaluation
- Manuel D'utilisation Gamme Murale Ar5000 1.1 Samsung 2014Document57 pagesManuel D'utilisation Gamme Murale Ar5000 1.1 Samsung 2014ddrumeaPas encore d'évaluation
- Bac - Les Meilleures Citations Pour Gagner Des Points en Français - SAMABACDocument4 pagesBac - Les Meilleures Citations Pour Gagner Des Points en Français - SAMABACbeavoguipaulbarre047Pas encore d'évaluation
- Wayser2009 2Document25 pagesWayser2009 2ALEXANDRE F VOLTAPas encore d'évaluation
- LibertéDocument19 pagesLibertételahamidPas encore d'évaluation
- Regarder Le Tresor Du Petit Nicolas Entier VFDocument4 pagesRegarder Le Tresor Du Petit Nicolas Entier VFxzcvxzPas encore d'évaluation
- Pied Au PlancherDocument2 pagesPied Au PlancherKenza BenmokhtarPas encore d'évaluation
- TD PalettisationDocument12 pagesTD PalettisationZine eddine Hadj mokhnachrPas encore d'évaluation
- Gestion Du Temps KaufDocument44 pagesGestion Du Temps KaufHodaPas encore d'évaluation
- Repercussion Islam Ames Hamad1Document15 pagesRepercussion Islam Ames Hamad1saydou bokotaPas encore d'évaluation
- ANALYSE D'UNE Démarche de Cartographie Du RisqueDocument174 pagesANALYSE D'UNE Démarche de Cartographie Du RisqueSouad TouchliftPas encore d'évaluation
- Chimie GeneraleDocument5 pagesChimie Generaletcheva jokhanan TiambiPas encore d'évaluation
- Les Courants LitterairesDocument2 pagesLes Courants LitterairesAna-Maria RoșuPas encore d'évaluation
- Chapitre5 DHCPDocument17 pagesChapitre5 DHCPjeanPas encore d'évaluation
- Corro Philo Valesse 1iere - PDFDocument114 pagesCorro Philo Valesse 1iere - PDFnayoussayacoubou17Pas encore d'évaluation
- Niveaux Langue Registres Exercices PDFDocument4 pagesNiveaux Langue Registres Exercices PDFSadek Kadda Wahid0% (1)
- 2-La Hierarchie AngéliqueDocument6 pages2-La Hierarchie Angéliquemichel fayettetchibinda100% (2)
- Les Vrais Secrets de La Magie NoireDocument113 pagesLes Vrais Secrets de La Magie NoireKawtar Gloom GOthside ൃ100% (1)
- TABLEAU EDEN ROCK - XLSX 2 VILLADocument20 pagesTABLEAU EDEN ROCK - XLSX 2 VILLARebs RebsPas encore d'évaluation
- Les Maladies de Dépérissement Des AgrumesDocument48 pagesLes Maladies de Dépérissement Des AgrumesMichelAndriamahazonoroRaherimanantsoaPas encore d'évaluation
- Met S 23 Sy PDocument4 pagesMet S 23 Sy Pkhocine100% (1)
- Robe Salopette CatherineDocument57 pagesRobe Salopette CatherineAude EPIARD100% (1)
- Mécanique Des RochesDocument41 pagesMécanique Des RochesIssam ZougariPas encore d'évaluation
- 17M110hhhhhh PDFDocument101 pages17M110hhhhhh PDFilham haniniPas encore d'évaluation
- Qui A Inventé L'aiguille CreuseDocument4 pagesQui A Inventé L'aiguille CreusejewelgoodremPas encore d'évaluation
- Anelise TalbourdeauDocument9 pagesAnelise TalbourdeauDennis AlexanderPas encore d'évaluation
- Syl M2 Inf-DcDocument28 pagesSyl M2 Inf-DcChihebeddine AmmarPas encore d'évaluation