Vous aimerez peut-être aussi
- TP Mecanique Des Fluides Mesure de DébitDocument9 pagesTP Mecanique Des Fluides Mesure de Débitkhalfallah hamza100% (1)
- Impact D'un JetDocument6 pagesImpact D'un JetKhouloud Besbes100% (1)
- Convection ForcéeDocument9 pagesConvection ForcéeBilal Bouakrif100% (1)
- TpdeversoireDocument9 pagesTpdeversoiremalik selena0% (1)
- TP2Document6 pagesTP2Mzoughi HaythemPas encore d'évaluation
- Rapport TP FluideDocument5 pagesRapport TP FluideNora RamiPas encore d'évaluation
- But Du TPDocument7 pagesBut Du TPAsma MensiPas encore d'évaluation
- Δh ΔT ΔV ΔPDocument5 pagesΔh ΔT ΔV ΔPMohamed AmanePas encore d'évaluation
- TP Pompe CentrifugeDocument6 pagesTP Pompe CentrifugeWafa SaidaniPas encore d'évaluation
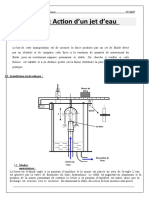
- TP #2: Action D'un Jet D'eauDocument8 pagesTP #2: Action D'un Jet D'eauSalah-eddine Ziti100% (1)
- Mini Projet de FondationsDocument5 pagesMini Projet de FondationsbPas encore d'évaluation
- Action Dun Jet Deau Sur Des Obstacles 3Document4 pagesAction Dun Jet Deau Sur Des Obstacles 3bhd aminouPas encore d'évaluation
- KadijaDocument6 pagesKadijaHANANE WAAZIZPas encore d'évaluation
- Compte Rendu tp02 ETUDE DUN VENTURIDocument4 pagesCompte Rendu tp02 ETUDE DUN VENTURImidou chPas encore d'évaluation
- Pompe CentrifugeDocument4 pagesPompe Centrifugeiheb.benlakhelPas encore d'évaluation
- Mds 2 TP 1 .... - 1Document9 pagesMds 2 TP 1 .... - 1luminatecommunicationPas encore d'évaluation
- Série 1Document3 pagesSérie 1Gasmi KrPas encore d'évaluation
- TP 1 Hydrau.g-1Document5 pagesTP 1 Hydrau.g-1abdelmalekchabi08Pas encore d'évaluation
- Devoir Libre 2 HydrologieDocument6 pagesDevoir Libre 2 HydrologieHanan BenhmaidaPas encore d'évaluation
- TP MDF 3Document4 pagesTP MDF 3Tv OuazenePas encore d'évaluation
- Convection Forcè RabieDocument6 pagesConvection Forcè RabieBilal BouakrifPas encore d'évaluation
- Atelier 4Document7 pagesAtelier 4khaoula bezzinePas encore d'évaluation
- TPmdf1Document25 pagesTPmdf1hammikheira844Pas encore d'évaluation
- لtude sismiqueDocument6 pagesلtude sismiqueAmine Hadj MoussaPas encore d'évaluation
- Mini Projet Pendule SimpleDocument11 pagesMini Projet Pendule Simplerim aninyPas encore d'évaluation
- TP2: Action D'u Jet D'eau Département Génie Mécanique: Réalisé ParDocument6 pagesTP2: Action D'u Jet D'eau Département Génie Mécanique: Réalisé ParAziz YhPas encore d'évaluation
- Nouveau Document Microsoft WordDocument6 pagesNouveau Document Microsoft Wordkzi itaPas encore d'évaluation
- Démonstration Du Théorème de BernoulliDocument29 pagesDémonstration Du Théorème de BernoulliEl Hadji Seydou FallPas encore d'évaluation
- TP 2 HydrodynamiqueDocument5 pagesTP 2 HydrodynamiqueNadji FenichiPas encore d'évaluation
- TPE methode speed (Enregistré automatiquement)Document9 pagesTPE methode speed (Enregistré automatiquement)Geovanni MBONDOPas encore d'évaluation
- Reactio D'un JetDocument9 pagesReactio D'un JetHaniPas encore d'évaluation
- Essai ŒdométriqueDocument6 pagesEssai Œdométriqueadnane kassimiPas encore d'évaluation
- Compte Rend U ThermoDocument8 pagesCompte Rend U ThermosouafiaymenabdrrahmanePas encore d'évaluation
- Projet7 - Dimensionnement de La Vidange de FondDocument9 pagesProjet7 - Dimensionnement de La Vidange de FondmustafaPas encore d'évaluation
- Apou 1Document7 pagesApou 1hylaayatPas encore d'évaluation
- Travaux Pratiques de MecaniqueDocument13 pagesTravaux Pratiques de Mecaniqueanaraja2005Pas encore d'évaluation
- Compte Rendu Hydro tp02Document4 pagesCompte Rendu Hydro tp02zeboudj.n14Pas encore d'évaluation
- TD2 RhéoDocument4 pagesTD2 RhéoAbderahmane Sahli100% (3)
- Consolidation Et Compressibilité À L'oediomètreDocument6 pagesConsolidation Et Compressibilité À L'oediomètremedtahafehriPas encore d'évaluation
- WahyaDocument14 pagesWahyaSofiane MehadjiPas encore d'évaluation
- TP1 Forces Exercees Par Un Jet Deau 1. ODocument14 pagesTP1 Forces Exercees Par Un Jet Deau 1. OMouadBtkPas encore d'évaluation
- Pour 3Document8 pagesPour 3hylaayatPas encore d'évaluation
- TP HydrauliqueDocument16 pagesTP HydrauliqueZakii MPas encore d'évaluation
- ETUDE DE CASDocument5 pagesETUDE DE CASAyoub VbPas encore d'évaluation
- NwopdnqwDocument3 pagesNwopdnqwBima AfdaPas encore d'évaluation
- Moment Sous Poids Propre: Etude de La SectionDocument14 pagesMoment Sous Poids Propre: Etude de La SectionAmada HolmesPas encore d'évaluation
- TP2 DernierDocument9 pagesTP2 Dernierchaymaa MRHARPas encore d'évaluation
- Oscillateur MécaniqueDocument10 pagesOscillateur MécaniqueyessinePas encore d'évaluation
- Examan TP Mecanique de SolDocument13 pagesExaman TP Mecanique de SolAmel JradPas encore d'évaluation
- Compte Rendu Cinetique Ch4 Ismail Et InesDocument5 pagesCompte Rendu Cinetique Ch4 Ismail Et InesIsmail ZitouniPas encore d'évaluation
- Correction Série 5 HydrologieDocument3 pagesCorrection Série 5 Hydrologiesami nasrPas encore d'évaluation
- Ajustement Des Débits Moyens AnnuelsDocument7 pagesAjustement Des Débits Moyens AnnuelsferhatiPas encore d'évaluation
- TP MDF Group 5etude Des Pertes de Charges Dans Les Conduites Coudes Et VannesDocument11 pagesTP MDF Group 5etude Des Pertes de Charges Dans Les Conduites Coudes Et VannesbsbsjsjdhPas encore d'évaluation
- TPDocument5 pagesTPAmel BrhPas encore d'évaluation
- Pitot Et Ventiri2Document10 pagesPitot Et Ventiri2Youssef BouzianePas encore d'évaluation
- Travaux Pratique de ThermodynamiqueDocument13 pagesTravaux Pratique de Thermodynamiqueouajihinizar00Pas encore d'évaluation
- Tp1 Pression A Paroi PlaneDocument11 pagesTp1 Pression A Paroi PlaneLakhdari BoutheinaPas encore d'évaluation
- TP - 4 Mach - HydrDocument3 pagesTP - 4 Mach - HydrIsmail EzzaraaPas encore d'évaluation
- GLmizM73Pdg Calcul-AbaqueDocument50 pagesGLmizM73Pdg Calcul-AbaqueMajdi JerbiPas encore d'évaluation
- jeu de société empile - Recherche GoogleDocument1 pagejeu de société empile - Recherche GoogleGhita OuazzaniPas encore d'évaluation
- Le PositionnementDocument5 pagesLe PositionnementGhita OuazzaniPas encore d'évaluation
- Etude de marché + strategieDocument6 pagesEtude de marché + strategieGhita OuazzaniPas encore d'évaluation
- Le PositionnementDocument5 pagesLe PositionnementGhita OuazzaniPas encore d'évaluation
- Chapitre - Modelisation - Liaisons - 11 - 2020 - Avec Commentaires Du ClasseDocument56 pagesChapitre - Modelisation - Liaisons - 11 - 2020 - Avec Commentaires Du ClasseNadia ElbouaazzaouiPas encore d'évaluation
- Ultrason Application MedecineDocument33 pagesUltrason Application MedecineMohamed MoudinePas encore d'évaluation
- Chp1 Variateur de Vitesse PDFDocument10 pagesChp1 Variateur de Vitesse PDFJamila DebayaPas encore d'évaluation
- DEFORMATIONDocument58 pagesDEFORMATIONishaq AllalPas encore d'évaluation
- Verification PannesDocument5 pagesVerification PannesAsting elboujidi abdessamadPas encore d'évaluation
- Cours - Thermo - TAC - S5 Chap 1Document51 pagesCours - Thermo - TAC - S5 Chap 1Youssef JayedPas encore d'évaluation
- Caracteristique Des MateriauxDocument10 pagesCaracteristique Des MateriauxAbdelali SolPas encore d'évaluation
- Chap 4 B Conduites Équivalentes CoursDocument15 pagesChap 4 B Conduites Équivalentes CoursModou MbayePas encore d'évaluation
- Lecon Phy 1 ActivitésDocument2 pagesLecon Phy 1 Activitéssaid berkaouiPas encore d'évaluation
- CSO5 - Sécurité Des ConstructionsDocument32 pagesCSO5 - Sécurité Des ConstructionsEDOHPas encore d'évaluation
- HYDRAULIQUEDocument38 pagesHYDRAULIQUEbessamPas encore d'évaluation
- Fonctions Réalistes de Vulnérabilité SismiqueDocument46 pagesFonctions Réalistes de Vulnérabilité Sismiquehasnaa azziPas encore d'évaluation
- Boulons Ordinaires - ExercicesDocument22 pagesBoulons Ordinaires - ExercicesMsdPas encore d'évaluation
- Text MarkDocument4 pagesText MarkrachidaccPas encore d'évaluation
- T4 PDFDocument2 pagesT4 PDFFatima DahbiPas encore d'évaluation
- U11 CorrigéDocument11 pagesU11 Corrigéspectrum66Pas encore d'évaluation
- 2015 Antilles Exo3 Correction CinemometreDocument3 pages2015 Antilles Exo3 Correction CinemometreMoustieePas encore d'évaluation
- TD 2 343 06-7Document3 pagesTD 2 343 06-7Adel AdelPas encore d'évaluation
- Compte Rendu SLIMANI MouhssineDocument17 pagesCompte Rendu SLIMANI MouhssineredPas encore d'évaluation
- Le Spin PDFDocument51 pagesLe Spin PDFDeedee81Pas encore d'évaluation
- Mecanique Des Fluides TD 1Document12 pagesMecanique Des Fluides TD 1عبد الرحيمPas encore d'évaluation
- SAS Thermodynamique 2 Premier Principe de La Thermodynamique SAM 280721Document22 pagesSAS Thermodynamique 2 Premier Principe de La Thermodynamique SAM 280721lilorcsaPas encore d'évaluation
- 12 Ondes SonoresDocument2 pages12 Ondes Sonoresferyelkeraani100% (1)
- Exercices Mecanique GeneraleDocument295 pagesExercices Mecanique GeneraleSalah-eddine ZitiPas encore d'évaluation
- Controle 2-1 1er Bac SM Semestre 1 Prof - Elajoumi (WWW - Pc1.ma)Document6 pagesControle 2-1 1er Bac SM Semestre 1 Prof - Elajoumi (WWW - Pc1.ma)Abdellah AboʉloʉąfaPas encore d'évaluation
- Chap 10 - Les Ondes Mecaniques - Copie 2Document2 pagesChap 10 - Les Ondes Mecaniques - Copie 2Amandiiine SeguinPas encore d'évaluation
- ExercicesDocument13 pagesExercicesSi smailPas encore d'évaluation
- Ebauche - Général - 5 Mai 2023Document20 pagesEbauche - Général - 5 Mai 2023Football on firePas encore d'évaluation
- Mecanique - Systemes Des Forces - Chap3Document25 pagesMecanique - Systemes Des Forces - Chap3G. FreddyPas encore d'évaluation
- Stabilite Des Constructions v2023 - 031458Document116 pagesStabilite Des Constructions v2023 - 031458Abel KisimbaPas encore d'évaluation