IUT du Littoral Côte d’Opale (Dept GEII) M. Fnadi & M.
Pruvost
Automatique – R4.06
TP No 3
Régulation de débit d’air
Rapport de TP : À la fin de la séance, vous allez déposer sur Moodle un compte rendu au format PDF
résumant les résultats obtenus et leur interprétations physiques.
1 But du TP
Il s’agit de déterminer un modèle de fonction de transfert du
système objet de l’étude, à partir d’essais expérimentaux. Ce
modèle sera déterminé pour un point de fonctionnement du
système au voisinage de 50% du signal de mesure. Les gran-
deurs obtenues lors de ces essais seront utilisées pour déter-
miner les paramètres d’un correcteur proportionnel. La ma-
quette Débit d’air représentée sur la figure 1 est reliée
aux boitiers ERD005 et IRPI. Le boitier IRPI se connecte
au PC via un câble USB sur le port USB situé le plus haut sur
la face avant du PC. Pour commander le processus on utilisera F IGURE 1: Photo de la maquette
le logiciel D_reg.
2 Identification : Régime transitoire en boucle ouverte
2.1 Caractéristique de transfert statique en boucle ouverte
Expérimentations
1. Choisir le mode de commande ’en boucle ouverte’, pour cela cliquer sur les menus successifs :
Mode de Commande -> Boucle ouverte.
2. Connecter la sortie régulateur (Sr ) à la commande débit, pour cela cliquer dans la zone repérée au dessus
du commutateur.
3. Positionner une sonde de mesure sur la mesure débit repérée MD, pour cela cliquer droit dans la zone
circulaire au dessous du point MD.
4. Vérifier que le clapet est ouvert (l’extrémité du tube).
5. Pour différentes valeurs de repos, relever la valeur affichée de la mesure de débit, pour changer la valeur
de repos il suffit de cliquer dans la zone repérée Valeur de repos et d’introduire une nouvelle valeur.
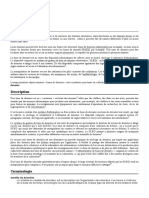
Positionner commutateur
I.R.P.I. (Interface pour Régulations de Processus Industriels
) pour commander débit Processus
Commande en Boucle Ouverte Débit température
Valeur Repos Air
10.00 %
N->A
IcD
Sc1
Commande: 4/20 mA Cde Débit
Pour modifier la Echelon constant Sr
0.00 %
Sr = 60.00 %
commande débit
N->A
IcT
Sc2
Retard = 0.000 s 4/20 mA
Cde Temp.
MD N<-A ImD F
M1
4/20 mA Capteur Débit
28.7 %
MT N<-A ImT T
M2
4/20 mA Capteur
Température
•F
Positionner sonde pour
•P
mesurer débit
F IGURE 2: Schéma synoptique pour cet essai
1
�Exploitations
1. A partir des points relevés expérimentalement tracer la caractéristique statique M D = f (Sr)
2. Conclure sur la linéarité de cette caractéristique.
2.2 Identification à partir d’une réponse à un échelon constant
Expérimentations
1. Choisir une valeur de repos égale à Sr = Sr0 - 10%
2. Choisir une commande de type ’Echelon constant’ et une ’Valeur C’ égale à Sr0 + 10% pour cela
C
’cliquer’ sur le bloc ’Commande’ puis sur le bouton , introduire la valeur de C , choisir une valeur de
retard d’application de la commande égal à 0, 2s et enfin ’cliquer’ sur ’Valider’.
3. Valider les points d’enregistrement, d’abord M D puis Sr , en ’cliquant’ dessus.
4. Appliquer l’échelon en ’cliquant’ sur le commutateur
5. Visualiser la réponse temporelle en ’cliquant’ sur le bouton
Exploitations
1. Montrer que l’on peut mettre la fonction de transfert du système en boucle ouverte sous la forme ci-
contre (système du premier ordre) :
Gvo .e−Tr p
G(p) =
(1 + τ.p)
2. Identifier les paramètres Tr , Gvo et τ selon le modèle de Broïda à partir de la courbe de réponse ex-
périmentale ? Le cours sur la régulation, en particulier le chapitre sur la modélisation et l’identification,
fournit des instructions précises à ce sujet.
3. Déterminer le temps de réponse à 5% noté tr5% en se servant du logiciel : Faire clic droit dans page
’tracé de courbe’ et sélectionner ’temps de réponse à 5% ’ ou cliquer sur le bouton .
4. Evaluer la valeur du retard pur noté Tr à partir de la réponse temporelle m(t) ou le calculer Tr ≈
(tr5% ) − 3.τ1 . Inscrivez en zone commentaire vos noms et groupe de TP. Faire un ’copier - coller’dans
votre compte rendu.
5. Identification sous le modèle de Strejc. Il s’agit de mettre la fonction de transfert du système en boucle
ouverte sous la forme :
Gvo
Gs (p) =
(1 + τ2 .p)n
3 Etude en BF avec correction proportionnelle
3.1 Expérimentations
1. Choisir le mode de commande en boucle fermée pour cela cliquer sur les menus successifs :
Choisir-> Mode de commande -> Boucle fermée -> PID
2. Ne valider que l’action proportionnelle du régulateur, pour cela fermer l’interrupteur en sortie d’action
P et ouvrir les interrupteurs en sortie des actions I et D. On change l’état des interrupteurs en cliquant
gauche.
3. Affecter la valeur du coefficient d’action proportionnel (Régler K1=1 et K2=1).
— Choisir la valeur de repos égale à 45%. Pour cela cliquer dans la fenêtre "Valeur de repos" et intro-
duire la valeur.
— Choisir une consigne en échelon constant, égale à Valeur C=55%. Pour cela cliquer dans la fenêtre
"Consigne" et introduire la valeur.
4. Sélectionner les points d’enregistrement. Pour cela cliquer dans les points C et M en cliquant gauche
dessus.
5. Appliquer la commande . Pour cela fermer l’interrupteur qui relie la fenêtre de commande à l’entrée de
commande en cliquant gauche dessus.
— Visualiser l’évolution temporelle des deux grandeurs sélectionnées en cliquant sur le bouton .
2
� — Placer éventuellement des repères "commentaires" : idempour le placement des coordonnées mais
après avoir sélectionner "commentaires" après un clic droit.
— Inscrivez en zone "commentaire" vos noms.
— Faire un copier coller (ctrl C) et coller (ctrl V) dans un document "Word" pour votre compte rendu.
— Faire une sauvegarde des résultats de l’essai en cours : cliquer sur "Fichier" puis "enregistrer sous"
et donner un nom au fichier de sauvegarde.
3.2 Relevés expérimentaux et exploitations
Pour les 3 essais, en utilisant les possibilités offertes par le logiciel "D-Reg" :
1. Déterminer le temps de réponse à 5%. On pourra utiliser les possibilités du logiciel D_Reg en cliquant
sur le bouton .
2. Relever l’amplitude absolue, puis relative, du dépassement éventuel ainsi que l’instant où il se produit
(instant noté tpic ). On pourra utiliser les possibilités du logiciel D_Reg en cliquant sur le bouton .
3. Déterminer l’erreur statique absolue puis relative :
(a) l’erreur statique absolue notée εs = C − m(∞)
(b) l’erreur statique relative notée εr en % = 100.(εs/C)
Mesure
A m(∞) ± 0.05*Δm
m(∞)
Commande
C(0+)=C(∞)=C=55%
B Δm
Δc m(0)
C(0-)=35%
t t
tpic tr à 5%
F IGURE 3: Mesure du dépassement et du temps de réponse
4. Partant des valeurs de réglage précédentes, rechercher la valeur de K2 qui conduit à une réponse tempo-
relle présentant un dépassement relatif de 15%. Enregistrer cet essai et relever également les grandeurs
caractéristiques.
5. Reporter toutes ces grandeurs caractéristiques dans un tableau ce qui facilitera leur comparaison.
6. Conclure.