Vous aimerez peut-être aussi
- Résumé Asservissement SIDocument20 pagesRésumé Asservissement SIBalalaŇaŖîf100% (7)
- Équations différentielles: Les Grands Articles d'UniversalisD'EverandÉquations différentielles: Les Grands Articles d'UniversalisPas encore d'évaluation
- TDDocument13 pagesTDMariem Trojette100% (1)
- Pour Une Critique Des Traductions John DonneDocument22 pagesPour Une Critique Des Traductions John DonneMatej Marko Petković0% (1)
- QCM GeneralDocument12 pagesQCM GeneralSalma SekkatPas encore d'évaluation
- FraisageDocument19 pagesFraisageWiàm Zanobà100% (1)
- 300 Accords de Piano Guide Et Dictionnaire 2015Document35 pages300 Accords de Piano Guide Et Dictionnaire 2015haykalham.piano9588Pas encore d'évaluation
- td1 EnoncéDocument4 pagestd1 EnoncéAbdiPas encore d'évaluation
- Accompagnement ISO 15189 2011Document1 pageAccompagnement ISO 15189 2011Tamara DissanayakePas encore d'évaluation
- Sujet 01Document6 pagesSujet 01Abdou HarchePas encore d'évaluation
- Transforme de LaplaceDocument5 pagesTransforme de LaplacewwiissPas encore d'évaluation
- CP 02 Organisation Et Gestion de Departement de CoupeDocument112 pagesCP 02 Organisation Et Gestion de Departement de CoupeHayet Hayet67% (3)
- Droit Des ContratsDocument53 pagesDroit Des ContratsLhmr Medo100% (1)
- Econometri PDFDocument37 pagesEconometri PDFstevy darel100% (1)
- ENV 1995-2-1999 - Calcul Des Structures en Bois - PontsDocument44 pagesENV 1995-2-1999 - Calcul Des Structures en Bois - PontsStefan IonitaPas encore d'évaluation
- Cours SLCI1 AutomaTIQUEDocument20 pagesCours SLCI1 AutomaTIQUElahceneljandouz358Pas encore d'évaluation
- Etude Temporel Des SystèmesDocument10 pagesEtude Temporel Des Systèmesdonald youngouaPas encore d'évaluation
- Travaux Dirigés Asservissements Continus 18Document18 pagesTravaux Dirigés Asservissements Continus 18Yassine HaniniPas encore d'évaluation
- Cours Automatique Séance4 2023 2024Document48 pagesCours Automatique Séance4 2023 2024AMJADPas encore d'évaluation
- 01 Exercices Laplace PDFDocument4 pages01 Exercices Laplace PDFnano physics50% (2)
- Cours AutomatiqueDocument77 pagesCours AutomatiqueAmadou Abdoulaye DIENGPas encore d'évaluation
- Annexe 2Document4 pagesAnnexe 2Abd El heyPas encore d'évaluation
- Cours Dautomatique NL Méthode de CypkinDocument8 pagesCours Dautomatique NL Méthode de CypkinAmi NePas encore d'évaluation
- RFWERFAWEFDocument18 pagesRFWERFAWEFCHOUKI REDAPas encore d'évaluation
- Cours Syst BouclesDocument72 pagesCours Syst BouclesAlaEddineBelhajFraj100% (1)
- Seance1 2020Document11 pagesSeance1 2020Karym ElhoussinePas encore d'évaluation
- 2- Résumé Cours Asservissement 2TSI1Document17 pages2- Résumé Cours Asservissement 2TSI1Abdelali MarinPas encore d'évaluation
- TD1 CLS2021Document3 pagesTD1 CLS2021Nadhir BndPas encore d'évaluation
- 126 Resume Asserv 2020 PDFDocument20 pages126 Resume Asserv 2020 PDFafif ikramePas encore d'évaluation
- Cours 7 - StabilitéDocument8 pagesCours 7 - StabilitéImad NouniPas encore d'évaluation
- Régulation CH03Document11 pagesRégulation CH03Abd HRPas encore d'évaluation
- Commande Avancée PDFDocument296 pagesCommande Avancée PDFBouazzaPas encore d'évaluation
- Cours Automatique PDFDocument51 pagesCours Automatique PDFEl-kahiri MouhcinePas encore d'évaluation
- Old-Lp342 TP3Document1 pageOld-Lp342 TP3zied houanebPas encore d'évaluation
- Résumé Asserv 2023Document15 pagesRésumé Asserv 2023elhayounifatimazohraPas encore d'évaluation
- Chap 5 AutDocument18 pagesChap 5 AutJean-Pierre AwuPas encore d'évaluation
- Chapitre 2 Modélisation Mathématique Des Systèmes AsservisDocument11 pagesChapitre 2 Modélisation Mathématique Des Systèmes AsservisSmati DjamelPas encore d'évaluation
- Chapitre 4 Transformee de LaplaceDocument10 pagesChapitre 4 Transformee de LaplaceRoeya KhachnaouiPas encore d'évaluation
- Chapitre 1 TLDocument13 pagesChapitre 1 TLmaymoun jabnouniPas encore d'évaluation
- Automatique Chap2Document33 pagesAutomatique Chap2Modibo ToloPas encore d'évaluation
- Resume AsservissementDocument20 pagesResume AsservissementNafie AlamiPas encore d'évaluation
- Travaux Diriges RégulationDocument7 pagesTravaux Diriges RégulationsonamoffothierryPas encore d'évaluation
- Cours Slci2Document16 pagesCours Slci2moipopPas encore d'évaluation
- CH 2Document9 pagesCH 2Rahal karimPas encore d'évaluation
- PLL 1Document9 pagesPLL 1Malick THIAMPas encore d'évaluation
- Transformada de LaplaceDocument2 pagesTransformada de LaplaceAlex BecaPas encore d'évaluation
- 1 Divers Aspects Du Filtrage D'Une Tension Pé-Riodique: DS N°1 CCINP - E3aDocument7 pages1 Divers Aspects Du Filtrage D'Une Tension Pé-Riodique: DS N°1 CCINP - E3aMohamed El AmeliPas encore d'évaluation
- Cours de Commande Numérique EnsatDocument63 pagesCours de Commande Numérique EnsatYassine ElabdiPas encore d'évaluation
- GE116Document84 pagesGE116Kesraoui HichemPas encore d'évaluation
- Chapitre 2 Transformee de LaplaceDocument6 pagesChapitre 2 Transformee de LaplaceLarbi ElbakkaliPas encore d'évaluation
- ZazaDocument5 pagesZazaHinnich SaidPas encore d'évaluation
- 612a28196e724tp Maths Transformee de Laplace Bts GoDocument4 pages612a28196e724tp Maths Transformee de Laplace Bts Gokoffi gerardPas encore d'évaluation
- Chapitre 2 Canaux Non IdéauxDocument12 pagesChapitre 2 Canaux Non Idéauxwalid berbouchiPas encore d'évaluation
- 9-Oscillations Libres Dans Un Circuit RLC Série (WWW - Pc1.ma)Document9 pages9-Oscillations Libres Dans Un Circuit RLC Série (WWW - Pc1.ma)Hiba Raja100% (1)
- Réponse D'un Système LineaireDocument27 pagesRéponse D'un Système LineaireanasPas encore d'évaluation
- TD3 Modelisation EX 5 (Corrigé)Document4 pagesTD3 Modelisation EX 5 (Corrigé)Iheb JallouzPas encore d'évaluation
- Chapitre 1Document10 pagesChapitre 1ADEM BELDIPas encore d'évaluation
- Les Filtres AnalogiquesDocument16 pagesLes Filtres AnalogiquesWalid HajiiPas encore d'évaluation
- Tabla LaplaceDocument2 pagesTabla LaplaceMAYRA ELIZABETH ESPARZA LOPEZPas encore d'évaluation
- Mon Cours Étudiant A&r - Commande NumériqueDocument50 pagesMon Cours Étudiant A&r - Commande NumériqueMouhamed DioufPas encore d'évaluation
- Corr S1 Ex I Ex II Ex III Ex IV MTI S2Document2 pagesCorr S1 Ex I Ex II Ex III Ex IV MTI S2ezziki lailaPas encore d'évaluation
- Transform e de LaplaceDocument18 pagesTransform e de Laplaceforum algerieDZPas encore d'évaluation
- Chapitre - 01 - Partie 01Document4 pagesChapitre - 01 - Partie 01Abdou HarchePas encore d'évaluation
- Transformation de Laplace Et Lois de Probabilites Bts 2è AnnéeDocument8 pagesTransformation de Laplace Et Lois de Probabilites Bts 2è Annéekouame guillaume kouadio100% (1)
- Chapitre 3 SC.Document20 pagesChapitre 3 SC.Ayman LamzouriPas encore d'évaluation
- Méthodes IdentificationDocument9 pagesMéthodes IdentificationAyoub Django RFPas encore d'évaluation
- TP infi IndusDocument11 pagesTP infi IndusWiàm ZanobàPas encore d'évaluation
- Format-mémoire Issam et Hakim1000(2)Document125 pagesFormat-mémoire Issam et Hakim1000(2)Wiàm ZanobàPas encore d'évaluation
- CHP IV Les Capteurs de NiveauDocument20 pagesCHP IV Les Capteurs de NiveauWiàm ZanobàPas encore d'évaluation
- Pfe Distributeur 2Document15 pagesPfe Distributeur 2Wiàm ZanobàPas encore d'évaluation
- Cours de Statistique Chapitre 3Document12 pagesCours de Statistique Chapitre 3Wiàm ZanobàPas encore d'évaluation
- ELECTROMAGNETISMEDocument44 pagesELECTROMAGNETISMEWiàm ZanobàPas encore d'évaluation
- TD Vérin de Sertissage ÉlèveDocument4 pagesTD Vérin de Sertissage ÉlèveWiàm ZanobàPas encore d'évaluation
- Cours Applications LaplaceDocument66 pagesCours Applications LaplaceWiàm ZanobàPas encore d'évaluation
- Propriétés Physiques Des Semi ConducteursDocument11 pagesPropriétés Physiques Des Semi ConducteursWiàm ZanobàPas encore d'évaluation
- Guide Du Big Data 2017 2018Document116 pagesGuide Du Big Data 2017 2018laparisiennePas encore d'évaluation
- Chap 1 Les SeismesDocument2 pagesChap 1 Les SeismesSVTPas encore d'évaluation
- Bendoume Moukagni Grace Keichia Epse IBINGA: Profil Professionnel CompétencesDocument2 pagesBendoume Moukagni Grace Keichia Epse IBINGA: Profil Professionnel CompétencesRHYCKS DANIELPas encore d'évaluation
- Seq0 180312 PDFDocument26 pagesSeq0 180312 PDFKamal BouzidiPas encore d'évaluation
- Centre Universitaire de Béchar: Cours Du Béton Armé IDocument6 pagesCentre Universitaire de Béchar: Cours Du Béton Armé IyoussefPas encore d'évaluation
- Tout Savoir Sur Windows 10Document4 pagesTout Savoir Sur Windows 10Stoleri LiviuPas encore d'évaluation
- PARIS La Ville La Plus RomantiqueDocument5 pagesPARIS La Ville La Plus RomantiqueAnonimul2000Pas encore d'évaluation
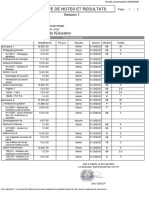
- Releve de Notes Et Resultats: Session 1Document2 pagesReleve de Notes Et Resultats: Session 1CasparPas encore d'évaluation
- Cloison AmovibleDocument14 pagesCloison Amovible'BenBelgacem HoussemPas encore d'évaluation
- TD Thermique 3 CorrectifDocument33 pagesTD Thermique 3 CorrectifNassima El OuazzaniPas encore d'évaluation
- Fiche Ppe3 Bini KoffiDocument2 pagesFiche Ppe3 Bini Koffiapi-360240780Pas encore d'évaluation
- 10.montaigne FragmentsDocument4 pages10.montaigne FragmentsmartaludwikamatlakPas encore d'évaluation
- Sartre - CopieDocument1 pageSartre - CopieSamuel ManyukaPas encore d'évaluation
- TDMeca 4Document3 pagesTDMeca 4Ihsan MokhlissePas encore d'évaluation
- TD2 GeoDocument2 pagesTD2 GeokawtarPas encore d'évaluation
- 3 Pfe 18031Document3 pages3 Pfe 18031MostafaPas encore d'évaluation
- Edition Du Lundi 28 Avril 2014Document24 pagesEdition Du Lundi 28 Avril 2014Annonces de la SeinePas encore d'évaluation
- VF Excel Correction V 25 01Document82 pagesVF Excel Correction V 25 01bfdbfdPas encore d'évaluation
- Chapitre 1 Ensembles de NombresDocument10 pagesChapitre 1 Ensembles de NombresJosephPas encore d'évaluation
- Presentation Atelier ALTITUDE TELECOMDocument27 pagesPresentation Atelier ALTITUDE TELECOMksbt8210Pas encore d'évaluation
- CHAPITRE I Mur de SoutènementDocument13 pagesCHAPITRE I Mur de SoutènementSafaa SassouPas encore d'évaluation
- Thèse Yann LerouxDocument293 pagesThèse Yann LerouxYann Leroux100% (2)