Vous aimerez peut-être aussi
- Prinicpe Fondamental StatiqueDocument9 pagesPrinicpe Fondamental StatiqueJp Tauvel100% (1)
- Moments-Couples-Résultantes (Présentation)Document29 pagesMoments-Couples-Résultantes (Présentation)kaoenergiepPas encore d'évaluation
- 5-Mesure de Debit PDFDocument112 pages5-Mesure de Debit PDFMed Ben AhmedPas encore d'évaluation
- (RDM) (TD) Bouteilles de PlongeeDocument4 pages(RDM) (TD) Bouteilles de Plongeebouchaib12345Pas encore d'évaluation
- Principe Fondamental de La Statique Et ADocument49 pagesPrincipe Fondamental de La Statique Et AAmal Hammami Ep SghaierPas encore d'évaluation
- Etude D'Un Montage de Roulement: Sujet 1: EnoncéDocument12 pagesEtude D'Un Montage de Roulement: Sujet 1: EnoncéSoufiane BounezraPas encore d'évaluation
- Resistance Des Matériaux - Tome 1, Timoshenko PDFDocument218 pagesResistance Des Matériaux - Tome 1, Timoshenko PDFHENGKIMHACHPas encore d'évaluation
- 1-Introduction Regulation PDFDocument14 pages1-Introduction Regulation PDFMed Ben AhmedPas encore d'évaluation
- Cinematique - Mécanique Des FluidesDocument13 pagesCinematique - Mécanique Des FluidesSalma BrbPas encore d'évaluation
- GGGJJDocument6 pagesGGGJJAhmed HamadaPas encore d'évaluation
- Electrotechnique Model 2 PDFDocument116 pagesElectrotechnique Model 2 PDFr_racPas encore d'évaluation
- Machines Et Conception Cours V PDFDocument20 pagesMachines Et Conception Cours V PDFFrancis Di-netjerPas encore d'évaluation
- Les VISDocument4 pagesLes VISSlah SametPas encore d'évaluation
- Suspensions CoursDocument13 pagesSuspensions Coursrachidtij50% (2)
- Buses Soniques PDFDocument10 pagesBuses Soniques PDFsb aliPas encore d'évaluation
- Le 2 Temps ProfDocument6 pagesLe 2 Temps ProfAmina DinariPas encore d'évaluation
- 3 Liaisons MécaniquesDocument6 pages3 Liaisons MécaniquesWafa Raboudi0% (1)
- Variation de Vitesse (Couple Resistant) PDFDocument3 pagesVariation de Vitesse (Couple Resistant) PDFmounaPas encore d'évaluation
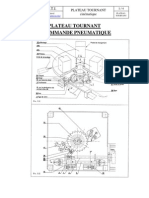
- Plateau TournantDocument4 pagesPlateau TournantMabrouk Ben AmarPas encore d'évaluation
- Manuel ChainesDocument46 pagesManuel ChainesaminePas encore d'évaluation
- Devoir Mecanique V2Document6 pagesDevoir Mecanique V2MATOUMBA PAULINPas encore d'évaluation
- A MecaniqueDocument15 pagesA Mecaniquemi_hathor6209Pas encore d'évaluation
- Mode D'emploi D'un Pied À CoulisseDocument1 pageMode D'emploi D'un Pied À CoulisseMohammed teggarPas encore d'évaluation
- Formulaire BTSDocument17 pagesFormulaire BTSMoussa TirPas encore d'évaluation
- Guidage en Rotation Par RoulementDocument4 pagesGuidage en Rotation Par RoulementMrnadhir MecaniquePas encore d'évaluation
- Calcul Clavette2Document16 pagesCalcul Clavette2Adima SaidPas encore d'évaluation
- CM7-CONAN - Roulement Oblique VFDocument70 pagesCM7-CONAN - Roulement Oblique VFAntonin Donnadieu0% (1)
- Serie03 TD MDFDocument2 pagesSerie03 TD MDFGenie100% (1)
- Coursd'Electroniques (YAP)Document168 pagesCoursd'Electroniques (YAP)anoh guyPas encore d'évaluation
- TP 01 2016Document38 pagesTP 01 2016raoufPas encore d'évaluation
- Cours EtancheiteDocument4 pagesCours EtancheiteAbdou Lahat NdiayePas encore d'évaluation
- Lois HydrostatiqueDocument10 pagesLois HydrostatiquefouadPas encore d'évaluation
- Ecole Nationale Supérieure D'ingénieurs de Tunis: Exercice 1Document10 pagesEcole Nationale Supérieure D'ingénieurs de Tunis: Exercice 1Ahmed GtariPas encore d'évaluation
- ENAFOR Equipement de Levage01Document73 pagesENAFOR Equipement de Levage01Laminus DZPas encore d'évaluation
- Pression HydrostatiqueDocument3 pagesPression HydrostatiqueKBahloulPas encore d'évaluation
- Correction Examen AMVENITDocument4 pagesCorrection Examen AMVENITzaidifaroukPas encore d'évaluation
- TD 1Document4 pagesTD 1Ahmed Hassan Hamid HamidPas encore d'évaluation
- Dev Mai 2003Document17 pagesDev Mai 2003FarrourahamadouPas encore d'évaluation
- Electro Cine TiqueDocument70 pagesElectro Cine TiquekarimovPas encore d'évaluation
- Calcul RotulesDocument7 pagesCalcul RotulesReaderRiderPas encore d'évaluation
- Activités Transmettre Lénergie Mécanique Sans Modification de La Vitesse PDFDocument5 pagesActivités Transmettre Lénergie Mécanique Sans Modification de La Vitesse PDFModen MdnPas encore d'évaluation
- Ex c1 Pelle HydrauliqueDocument3 pagesEx c1 Pelle Hydrauliqueyounes100% (1)
- TD 05 Corrigé - Comportement Temporel Des SLCI Proportionnel, Dérivateur, Intégrateur Et Du 1er OrdreDocument6 pagesTD 05 Corrigé - Comportement Temporel Des SLCI Proportionnel, Dérivateur, Intégrateur Et Du 1er OrdreMohamed AbaakilPas encore d'évaluation
- Exo Vannes - IIDocument3 pagesExo Vannes - IIpalary18100% (1)
- Notion de Base RDMDocument17 pagesNotion de Base RDMJean EudesPas encore d'évaluation
- Chapitre 7 Elements Immobilisation Organes ArbreDocument4 pagesChapitre 7 Elements Immobilisation Organes ArbreEditson SobtsiPas encore d'évaluation
- Cours CNDDocument44 pagesCours CNDالخماهو الاصيل صاحبيPas encore d'évaluation
- 1-1 Initiation À La Vibration PDFDocument15 pages1-1 Initiation À La Vibration PDFBelaliaPas encore d'évaluation
- Galilei Et Einstein: Réflexions Sur La Théorie De La Relativité General - La Chute Libre Des CorpsD'EverandGalilei Et Einstein: Réflexions Sur La Théorie De La Relativité General - La Chute Libre Des CorpsPas encore d'évaluation
- Expériences et observations sur l'électricité faites à Philadelphie en AmériqueD'EverandExpériences et observations sur l'électricité faites à Philadelphie en AmériquePas encore d'évaluation
- Évolution des procédés - la séparation de l'air atmosphérique en ses éléments, l'oxygène et l'azoteD'EverandÉvolution des procédés - la séparation de l'air atmosphérique en ses éléments, l'oxygène et l'azotePas encore d'évaluation
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- Anglais Visuel 3 - Nourriture et Cuisine - 250 images, 250 mots et des exemples de phrases - L’Anglais facile a lire: Anglais Visuel, #3D'EverandAnglais Visuel 3 - Nourriture et Cuisine - 250 images, 250 mots et des exemples de phrases - L’Anglais facile a lire: Anglais Visuel, #3Pas encore d'évaluation
- TorseurDocument36 pagesTorseurFilaliAbderrahimPas encore d'évaluation
- Cours - Modélisation Des Systèmes Mécaniques - Insa ParisDocument162 pagesCours - Modélisation Des Systèmes Mécaniques - Insa ParisAlaa Eddine Radh100% (4)
- MP/MP Psi/Psi : Sciences IndustriellesDocument530 pagesMP/MP Psi/Psi : Sciences IndustriellesAbdellah agregationPas encore d'évaluation
- Chapitre 0 Calcul VectorielDocument22 pagesChapitre 0 Calcul VectorielHamid AwichePas encore d'évaluation
- Statique Du SolideDocument55 pagesStatique Du SolideZiko100% (1)
- 110 1 8 Cineamtique Composition MouvementDocument10 pages110 1 8 Cineamtique Composition MouvementCherki ONkPas encore d'évaluation
- Robotique IndustrielleDocument32 pagesRobotique IndustrielleSofia Berry100% (3)
- Statique 2-PFSDocument4 pagesStatique 2-PFSAdnanePas encore d'évaluation
- DS5 MPSI1 Avril 21Document17 pagesDS5 MPSI1 Avril 21abderrahim najimPas encore d'évaluation
- Meca Solide Rigides Complet 2019Document102 pagesMeca Solide Rigides Complet 2019elfananihanaPas encore d'évaluation
- MecaFluides4sur6 PDFDocument34 pagesMecaFluides4sur6 PDFEvaPas encore d'évaluation
- TD Série1 TorseursDocument2 pagesTD Série1 TorseursEl Matador100% (1)
- Colle 7 Tsi PFS 6Document1 pageColle 7 Tsi PFS 6yasser bhPas encore d'évaluation
- Cours MG + TDDocument44 pagesCours MG + TDdido100% (1)
- Livre Cours Sciences Industrielles 1ere Annee Ouakidi2010Document151 pagesLivre Cours Sciences Industrielles 1ere Annee Ouakidi2010Felicia Richard100% (1)
- QCM Et Tests DiversDocument10 pagesQCM Et Tests DiversNicola VitulliPas encore d'évaluation
- MSD TPDocument96 pagesMSD TPbenshotshajeanpaulPas encore d'évaluation
- Physique IV Mécanique RationnelleDocument145 pagesPhysique IV Mécanique RationnelleAbdoulaye DIALLOPas encore d'évaluation
- ZINE RDM Cours Et TDs GIM 1 PDFDocument45 pagesZINE RDM Cours Et TDs GIM 1 PDFZAKARIA BOUKILPas encore d'évaluation
- Préparation Concours20 CinématiqueDocument7 pagesPréparation Concours20 CinématiqueAdamPas encore d'évaluation
- TD2 Cohésion TreuilDocument2 pagesTD2 Cohésion TreuilAlexandre Trecasse100% (1)
- Td3 StatiqueDocument10 pagesTd3 StatiqueYaye Anta DiopPas encore d'évaluation
- Cours CM Partie 1 PDFDocument40 pagesCours CM Partie 1 PDFJELLALI Alaa100% (1)
- Chap 2 - TorseursDocument14 pagesChap 2 - Torseursandry nomenjanahryPas encore d'évaluation
- (P. Agati - N. Mattera) Mecanique Appliquee - ResiDocument692 pages(P. Agati - N. Mattera) Mecanique Appliquee - ResiChaimaa EnnouhiPas encore d'évaluation
- Cours 1Document13 pagesCours 1Jonathan BataillePas encore d'évaluation
- Lagrange CoursDocument30 pagesLagrange CoursHorseman AnassPas encore d'évaluation
- °°cours Mecanique Solide Fsa-Agadir SMP3 20-21 PDFDocument37 pages°°cours Mecanique Solide Fsa-Agadir SMP3 20-21 PDFAkerkouch OmarPas encore d'évaluation
- PSI7SIDocument32 pagesPSI7SIbassem SakjiPas encore d'évaluation
- Chapitre 6 MSI COMPLETDocument27 pagesChapitre 6 MSI COMPLETMohamed mellah0% (1)