Vous aimerez peut-être aussi
- Exercices d'optique et d'électromagnétismeD'EverandExercices d'optique et d'électromagnétismeÉvaluation : 5 sur 5 étoiles5/5 (1)
- Exercices d'intégrales de lignes, de surfaces et de volumesD'EverandExercices d'intégrales de lignes, de surfaces et de volumesPas encore d'évaluation
- Introduction à la physique de la matièreD'EverandIntroduction à la physique de la matièreÉvaluation : 3 sur 5 étoiles3/5 (1)
- Exercices d'intégrales et d'équations intégro-différentiellesD'EverandExercices d'intégrales et d'équations intégro-différentiellesPas encore d'évaluation
- Exercice Cinématique Solide Avec CorrectionDocument6 pagesExercice Cinématique Solide Avec Correctionomar EL AADDAMPas encore d'évaluation
- Serie2 CorrectionDocument8 pagesSerie2 CorrectionNayoPas encore d'évaluation
- 4 CinematiqueDocument2 pages4 CinematiqueRahouba Ben DhiebPas encore d'évaluation
- TD N°2 Fonctions de L'electronique : Oscillateurs Quasi-SinusoïdauxDocument5 pagesTD N°2 Fonctions de L'electronique : Oscillateurs Quasi-SinusoïdauxÆn RåçhPas encore d'évaluation
- Formulaire CinématiqueDocument1 pageFormulaire CinématiqueDABAKH LDEEBOYPas encore d'évaluation
- Dynamique en Translation ExerciceDocument4 pagesDynamique en Translation Exercicenour1960100% (1)
- Examens Corr MecDocument7 pagesExamens Corr MecKhalid ZegPas encore d'évaluation
- TD Cinematique 2023-WahabdiopDocument2 pagesTD Cinematique 2023-Wahabdioppapa samba sarrPas encore d'évaluation
- SERIE 4 Changement RéférentielDocument3 pagesSERIE 4 Changement RéférentielOussama parkour. Red100% (1)
- Coordonnées Cartésiennes, Cylindriques, SphériquesDocument3 pagesCoordonnées Cartésiennes, Cylindriques, SphériquesbadriPas encore d'évaluation
- TD 1 CorrectionDocument0 pageTD 1 Correctionm-roi2005Pas encore d'évaluation
- Série 3aDocument3 pagesSérie 3aOmar SeddasPas encore d'évaluation
- 5wa3w-Examen Special Physique3 2010 2011Document4 pages5wa3w-Examen Special Physique3 2010 2011Manizan Emmanuel YaoPas encore d'évaluation
- Preparation DS 05Document8 pagesPreparation DS 05الدعم الجامعيPas encore d'évaluation
- Courant TransitoiresDocument16 pagesCourant TransitoiresMbaira LeilaPas encore d'évaluation
- SLCI - Analyse FréquentielleDocument10 pagesSLCI - Analyse FréquentielleBah KhalilPas encore d'évaluation
- Série N°3 Cinématique PDFDocument4 pagesSérie N°3 Cinématique PDFSa LimPas encore d'évaluation
- Mécanique Du Solide-1 PDFDocument58 pagesMécanique Du Solide-1 PDFArsène KekpenaPas encore d'évaluation
- Cinematique en Coordonnees CartesiennesDocument11 pagesCinematique en Coordonnees CartesiennesHassan HallaouaPas encore d'évaluation
- Rachid Mesrar Aplli Cine D Solide PDFDocument10 pagesRachid Mesrar Aplli Cine D Solide PDFAhmed Hamada100% (2)
- TP Ondes Et VibrationsDocument8 pagesTP Ondes Et VibrationsNo1 Ad3Pas encore d'évaluation
- Cinematique AnalytiqueDocument5 pagesCinematique AnalytiqueDésiré TedPas encore d'évaluation
- TD2 - Meca1 - Sigma - 2021 - CopieDocument3 pagesTD2 - Meca1 - Sigma - 2021 - Copieblandinette momoPas encore d'évaluation
- Chapitre 1 Charge Et Décharge D' Un CondensateurDocument9 pagesChapitre 1 Charge Et Décharge D' Un CondensateurfarouhhPas encore d'évaluation
- Cinématique ExercicesDocument9 pagesCinématique ExercicesSébastien NiyonzimaPas encore d'évaluation
- Theorie Des Mecanismes Hyperstatisme, Mobilite, Liaison EquivalenteDocument8 pagesTheorie Des Mecanismes Hyperstatisme, Mobilite, Liaison EquivalenteothmanePas encore d'évaluation
- Referentiel Non GaliléenDocument24 pagesReferentiel Non GaliléenVictor B.Pas encore d'évaluation
- TP N 1 RsaDocument15 pagesTP N 1 RsaAbar youcefPas encore d'évaluation
- 21 Exercices en Electrostatique Et MagnétostatiqueDocument9 pages21 Exercices en Electrostatique Et MagnétostatiqueAfkir HamzaPas encore d'évaluation
- CNC Si Psi 2015Document30 pagesCNC Si Psi 2015Zaineb AbbadPas encore d'évaluation
- TD2 Cinematique Corrige PHY12ab 2014Document13 pagesTD2 Cinematique Corrige PHY12ab 2014MohamedBejjaPas encore d'évaluation
- TD - Cinématique SolideDocument3 pagesTD - Cinématique SolideAbdelkhalekBenOmarPas encore d'évaluation
- TD3 CinematiqueDocument4 pagesTD3 Cinematiqueimenrds0% (1)
- TD de Mecanique Generale ISET Nabeul L1Document18 pagesTD de Mecanique Generale ISET Nabeul L1Adel ZitouniPas encore d'évaluation
- Changement de RéférentielDocument7 pagesChangement de RéférentielHossam TalibPas encore d'évaluation
- Série D'exercices - Cinématique - Ts - SunudaaraDocument5 pagesSérie D'exercices - Cinématique - Ts - SunudaaraJule BaPas encore d'évaluation
- 9 Generalite Systemes OscillantsDocument19 pages9 Generalite Systemes OscillantsMilliardaire RüssëPas encore d'évaluation
- DS 15 16 1Document5 pagesDS 15 16 1Mohammed MarzougPas encore d'évaluation
- 4 - Problemes Corrigés D'electrotechniquelDocument10 pages4 - Problemes Corrigés D'electrotechniquelblbmalekPas encore d'évaluation
- A Savoir InertieDocument3 pagesA Savoir InertieemyazPas encore d'évaluation
- TP 4Document8 pagesTP 4Mohamud Lhaf100% (1)
- Mouvements de Translation Exercices ÉlèveDocument6 pagesMouvements de Translation Exercices ÉlèveMourad Chokri Ben JemaaPas encore d'évaluation
- Enoncé.: M5.4. Oscillations Forcées D'un Véhicule Sur Une Route OnduléeDocument3 pagesEnoncé.: M5.4. Oscillations Forcées D'un Véhicule Sur Une Route OnduléeCristopher RolandoPas encore d'évaluation
- Dynamique Du Point Matériel (Référentiel Galiléen)Document9 pagesDynamique Du Point Matériel (Référentiel Galiléen)KhaDija KhaLdiPas encore d'évaluation
- (Mam) (TD) Modelisation Des Actions MecaniquesDocument2 pages(Mam) (TD) Modelisation Des Actions MecaniquesMATOUMBA PAULIN100% (1)
- ProjMMD1 BarrageTamiseSujet PDFDocument22 pagesProjMMD1 BarrageTamiseSujet PDFclara supiotPas encore d'évaluation
- CNC Si MP 2021 CGDocument8 pagesCNC Si MP 2021 CGayaelhadef123Pas encore d'évaluation
- Thermo 3 GGDocument4 pagesThermo 3 GGmathsmiths2010100% (1)
- Armatures Fondations SuperficiellesDocument3 pagesArmatures Fondations SuperficiellesThouleija AyachiPas encore d'évaluation
- 2-2-Action de La NeigeDocument7 pages2-2-Action de La NeigeAhmed BougachaPas encore d'évaluation
- 1 Composition Du BetonDocument11 pages1 Composition Du BetonMajida RoumyPas encore d'évaluation
- Ferraillage BetonDocument125 pagesFerraillage BetonROUABAHKA100% (6)
- 02 3 Durabilite Enrobage PDFDocument3 pages02 3 Durabilite Enrobage PDFMahdi KhadraPas encore d'évaluation
- Circulaire BTS bâtiment 2020Document8 pagesCirculaire BTS bâtiment 2020api34Pas encore d'évaluation
- Grille Isometrique TuyauterieDocument7 pagesGrille Isometrique TuyauterieNeo Pacifista100% (1)
- Resume Poteaux Ipe Ipn - Projet - 2000 PDFDocument33 pagesResume Poteaux Ipe Ipn - Projet - 2000 PDFljr21Pas encore d'évaluation
- Cours12 DynamiqueDocument5 pagesCours12 Dynamiqueapi34Pas encore d'évaluation
- Cours Qualité ProfDocument19 pagesCours Qualité Profapi34Pas encore d'évaluation
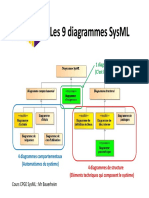
- Les 9 Diagramas SysMLDocument12 pagesLes 9 Diagramas SysMLEdith NavaPas encore d'évaluation
- Quizz ForceDocument4 pagesQuizz Forceapi34Pas encore d'évaluation
- Exercices Concept GPS Et Cotation Iso-3Document10 pagesExercices Concept GPS Et Cotation Iso-3api34Pas encore d'évaluation
- Techno Gene CM PDFDocument93 pagesTechno Gene CM PDFmathx342908100% (1)
- BTS CRCI BTS CRCI Conception Et RealisatDocument37 pagesBTS CRCI BTS CRCI Conception Et Realisatapi34Pas encore d'évaluation
- Cours Modelisation - de - SYSMLDocument12 pagesCours Modelisation - de - SYSMLapi34Pas encore d'évaluation
- Cours SoudureDocument9 pagesCours Soudureapi34Pas encore d'évaluation
- Le Serrage Des Joints de Brides Dans Les Classes de Bts CrciDocument92 pagesLe Serrage Des Joints de Brides Dans Les Classes de Bts Crciapi34Pas encore d'évaluation
- 5241 Metallurgie Du Soudage Dossier ProfesseurDocument55 pages5241 Metallurgie Du Soudage Dossier ProfesseurImedRezk0% (1)
- Dilatation Thermique Des Matériaux Et Amplitude de Mouvement Du JointDocument3 pagesDilatation Thermique Des Matériaux Et Amplitude de Mouvement Du Jointapi34100% (1)
- Referentiel Crci 2018Document118 pagesReferentiel Crci 2018api34Pas encore d'évaluation
- Differents Procedes de SoudageDocument62 pagesDifferents Procedes de Soudageapi34100% (1)
- Guide D Auto-Apprentissage Soudage PDFDocument266 pagesGuide D Auto-Apprentissage Soudage PDFkatibra100% (3)
- 1.1 Introduction GeneraleDocument35 pages1.1 Introduction Generaleapi34Pas encore d'évaluation
- 5241 Metallurgie Du Soudage Dossier ProfesseurDocument55 pages5241 Metallurgie Du Soudage Dossier ProfesseurImedRezk0% (1)
- SoudabilitacierDocument10 pagesSoudabilitacierapi34Pas encore d'évaluation
- Cours Metallurgie Soudage Word Novembre 2014Document43 pagesCours Metallurgie Soudage Word Novembre 2014api34Pas encore d'évaluation
- 1.1 Introduction GeneraleDocument35 pages1.1 Introduction Generaleapi34Pas encore d'évaluation
- Differents Procedes de SoudageDocument62 pagesDifferents Procedes de Soudageapi34100% (1)
- Guide D Auto-Apprentissage Soudage PDFDocument266 pagesGuide D Auto-Apprentissage Soudage PDFkatibra100% (3)
- Physique Terminale S Tome 1 135Document3 pagesPhysique Terminale S Tome 1 135ely ElassryPas encore d'évaluation
- Staub GM 428Document15 pagesStaub GM 428giampieroPas encore d'évaluation
- Tutorial HlibDocument9 pagesTutorial HlibHajar MobhidPas encore d'évaluation
- GM DS7-2015 CorrigeDocument6 pagesGM DS7-2015 CorrigeZakaria BENBARKAPas encore d'évaluation
- s2019 Caplp Externe Genie Meca Maintenance Vehicules 1 CopieDocument41 pagess2019 Caplp Externe Genie Meca Maintenance Vehicules 1 CopieGRANDPas encore d'évaluation
- Cours 16Document5 pagesCours 16BalalaŇaŖîfPas encore d'évaluation
- GIM-Chapitre 1 - Fonction Assemblage 1ère PartieDocument35 pagesGIM-Chapitre 1 - Fonction Assemblage 1ère PartieDavid VHOUMBYPas encore d'évaluation
- UNITÉ 1 - La Cinématique: Sph3UDocument41 pagesUNITÉ 1 - La Cinématique: Sph3Uapi-528291418Pas encore d'évaluation
- tp3 - Dynamique 2eme Loi de NewtonDocument3 pagestp3 - Dynamique 2eme Loi de Newtonahmed benhammaPas encore d'évaluation
- Boite de Vitesses Manuelle: Cliquez Sur Le Signet Correspondant Pour Sélectionner L'année Du Modèle Que Vous SouhaitezDocument22 pagesBoite de Vitesses Manuelle: Cliquez Sur Le Signet Correspondant Pour Sélectionner L'année Du Modèle Que Vous SouhaitezpompelargeurPas encore d'évaluation
- Prothese Transtibiale 2013 Si PSIDocument31 pagesProthese Transtibiale 2013 Si PSIKhaled SouaissaPas encore d'évaluation
- M23-CH4 Boites de VitesseDocument13 pagesM23-CH4 Boites de VitesseAbdoul Majid YaouPas encore d'évaluation
- Exercices Supplmentaires Me CorrigDocument2 pagesExercices Supplmentaires Me CorrigZakaria Nexus92% (12)
- Turbomachines FinalDocument33 pagesTurbomachines Finalothmaner1990100% (16)
- 13 - Représentation Des Liaisons MécaniquesDocument13 pages13 - Représentation Des Liaisons MécaniquesManal El Matmour M'hairPas encore d'évaluation
- Boîte Mécanique À 6 Rapports 0A5Document36 pagesBoîte Mécanique À 6 Rapports 0A5Alexandre RobertPas encore d'évaluation
- Série 04 - Cinématique RelatifDocument4 pagesSérie 04 - Cinématique RelatifZahia ZinebPas encore d'évaluation
- Statique Dans L'espaceDocument35 pagesStatique Dans L'espaceseddikmorabet50% (2)
- Statique - Exercices Divers ELEVEDocument2 pagesStatique - Exercices Divers ELEVEOussama ZagharPas encore d'évaluation
- SKF 80p1 VKT en E07 enDocument65 pagesSKF 80p1 VKT en E07 enEmmanuel Quequesana VílchezPas encore d'évaluation
- STI pt3 PDFDocument10 pagesSTI pt3 PDFMakrem CherifPas encore d'évaluation
- Cm-Modelisation Des Liaisons MecaniqueDocument11 pagesCm-Modelisation Des Liaisons MecaniqueYosso YohannPas encore d'évaluation
- TD 6B Science de L'ingénieurDocument4 pagesTD 6B Science de L'ingénieurNiane Møùstãphà BãssîrôūPas encore d'évaluation
- TD 18 - Loi Entrée-Sortie Par Fermeture GéométriqueDocument4 pagesTD 18 - Loi Entrée-Sortie Par Fermeture GéométriqueJawad Hamriti100% (1)
- Deutz Fahr Agroplus 60-70-80 Service Manual PDFDocument506 pagesDeutz Fahr Agroplus 60-70-80 Service Manual PDFCosobea PetruPas encore d'évaluation
- These Van Anh PDFDocument118 pagesThese Van Anh PDFdvnccbmacbtPas encore d'évaluation
- Les Liaisons Doc Prof MOUKHTARIDocument9 pagesLes Liaisons Doc Prof MOUKHTARIELMustaphaELMoukhtariPas encore d'évaluation
- TP1 New Ec Ligne Action MecaniquetransmissibleDocument8 pagesTP1 New Ec Ligne Action MecaniquetransmissiblemateosohyPas encore d'évaluation
- 08 Section MTDocument31 pages08 Section MTAli LabidiPas encore d'évaluation