Vous aimerez peut-être aussi
- QCM 17 HelicesDocument10 pagesQCM 17 HelicesAbdelaziz Abdo100% (1)
- Fusion 360 | étape par étape: Conception CAO, Simulation FEM & FAO pour les débutants.D'EverandFusion 360 | étape par étape: Conception CAO, Simulation FEM & FAO pour les débutants.Pas encore d'évaluation
- Cour Solid Works 01Document48 pagesCour Solid Works 01ntayoub0% (1)
- FreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesD'EverandFreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesPas encore d'évaluation
- Memo MécaniqueDocument212 pagesMemo MécaniqueYounessElkarkouriPas encore d'évaluation
- TP Solaire PhotovoltaiqueDocument21 pagesTP Solaire PhotovoltaiqueOthmane Elmouatamid100% (2)
- Fascicule de TD Maintenance IndustrielleDocument17 pagesFascicule de TD Maintenance IndustrielleOussama Zaghar100% (4)
- La Méthode Du Barycentre - Etude de CasDocument13 pagesLa Méthode Du Barycentre - Etude de Casapi-3748220100% (5)
- Omocn MTP06 PDFDocument90 pagesOmocn MTP06 PDFBadr HadriPas encore d'évaluation
- Support de Cours Intermediaire Lectra Modaris v8 Expert-CompresseDocument46 pagesSupport de Cours Intermediaire Lectra Modaris v8 Expert-CompresseAbkari Nabil100% (3)
- MINI PROJET ConceptionDocument40 pagesMINI PROJET Conceptionzehii ghofranPas encore d'évaluation
- TP 30 310Document9 pagesTP 30 310Anonymous 9qKdViDP4Pas encore d'évaluation
- Accouplements, Embrayages, FreinsDocument16 pagesAccouplements, Embrayages, FreinsZakariaBenPas encore d'évaluation
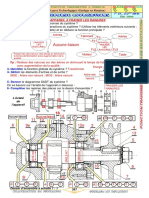
- FONCTION TRANSMETTRE L ÉNERGIE Aspect Technologique (Guidage en Rotation) Reponse Applications PDFDocument18 pagesFONCTION TRANSMETTRE L ÉNERGIE Aspect Technologique (Guidage en Rotation) Reponse Applications PDFBen Fah100% (3)
- TP Hydrau (1 Et 2)Document21 pagesTP Hydrau (1 Et 2)Oussama SalHiPas encore d'évaluation
- Isostatismes MIP MAP PDFDocument8 pagesIsostatismes MIP MAP PDFMou Hamoudi100% (1)
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- TP FiletageDocument5 pagesTP FiletageSaid Djaballah100% (2)
- BTS CPI Juin 2000 Palan Eurochain VL5 U41Document33 pagesBTS CPI Juin 2000 Palan Eurochain VL5 U41Yassire SamirPas encore d'évaluation
- TD FinaleDocument8 pagesTD Finalewass princePas encore d'évaluation
- Dossier Technique Cric HydrauliqueDocument6 pagesDossier Technique Cric HydrauliqueYousfi Wahid100% (1)
- 9 Veaux TrainsDocument268 pages9 Veaux TrainsKhalil MokhPas encore d'évaluation
- TP 4 Etude Systeme Differentiel PDFDocument10 pagesTP 4 Etude Systeme Differentiel PDFYoucef MimouniPas encore d'évaluation
- TD 1: Compresseur: ON DONNE: Trois Vues Réduites Du Compresseur D'airDocument99 pagesTD 1: Compresseur: ON DONNE: Trois Vues Réduites Du Compresseur D'airCHOKRI Atef100% (1)
- CoursDocument181 pagesCoursMohamed Sahil100% (3)
- M13Programmation Reglage Et Conduite Des MOCN Version 1Document212 pagesM13Programmation Reglage Et Conduite Des MOCN Version 1Soufiane TouilPas encore d'évaluation
- Graphe de Montage Et Graphe de DémontageDocument18 pagesGraphe de Montage Et Graphe de Démontagehamdi radhwenPas encore d'évaluation
- Conception Touret À Meuler PDFDocument2 pagesConception Touret À Meuler PDFMohamed SaidiPas encore d'évaluation
- Exposé MacroDocument41 pagesExposé MacroBrian PhungPas encore d'évaluation
- Analyse Catia V5 PDFDocument55 pagesAnalyse Catia V5 PDFkokakiki100% (1)
- LA VIABILITE DES RADIOS DE PROXIMITE - MODULE 4 - Une Guide de Formation (Radio For Peacebuilding Africa, SFCG - 2010)Document17 pagesLA VIABILITE DES RADIOS DE PROXIMITE - MODULE 4 - Une Guide de Formation (Radio For Peacebuilding Africa, SFCG - 2010)HayZara MadagascarPas encore d'évaluation
- Correction TD 3 Schéma CinématiqueDocument7 pagesCorrection TD 3 Schéma CinématiqueShooting StarPas encore d'évaluation
- AccouplementDocument32 pagesAccouplementTimo ShmittPas encore d'évaluation
- 01 Tour ParalleleDocument7 pages01 Tour ParallelekhocinePas encore d'évaluation
- td3 Ci1 Capteur CorDocument4 pagestd3 Ci1 Capteur CorbecemPas encore d'évaluation
- Progression Programme 2STMDocument1 pageProgression Programme 2STMadil100% (1)
- Mini ProjetDocument13 pagesMini ProjetSaif GuesmiPas encore d'évaluation
- (Tec) (CO) Transmission de PuissanceDocument18 pages(Tec) (CO) Transmission de PuissanceousmanePas encore d'évaluation
- Les Douille À Billes PDFDocument50 pagesLes Douille À Billes PDFNadia DridiPas encore d'évaluation
- Exam 2010 PresentationDocument20 pagesExam 2010 PresentationRamzi MansouriPas encore d'évaluation
- Engrenages ConiquesDocument3 pagesEngrenages ConiquesAmine IsaAdPas encore d'évaluation
- Meca0444 11Document48 pagesMeca0444 11Djelloul ReziniPas encore d'évaluation
- t2 Con Elec2015 CadreuseDocument6 pagest2 Con Elec2015 CadreuseBen Hamda Fethi80% (5)
- Chapitre 3 Calcul ArbreDocument8 pagesChapitre 3 Calcul ArbreYousif AliPas encore d'évaluation
- Chapitre V - Les Centres D'usinageDocument3 pagesChapitre V - Les Centres D'usinagehichem tazir100% (2)
- Etude TC 2016 SUJET 21 11 2013Document14 pagesEtude TC 2016 SUJET 21 11 2013Ben Aissa ChokriPas encore d'évaluation
- TD1 EngrenagesDocument6 pagesTD1 EngrenagesYoussefPas encore d'évaluation
- Les Liaisons Cinématiques Sur CATIA V5Document37 pagesLes Liaisons Cinématiques Sur CATIA V5abir bzPas encore d'évaluation
- Rapport BE1Document51 pagesRapport BE1ahmed017100% (1)
- Chap 2 Les Embrayages GM2 ENIBDocument23 pagesChap 2 Les Embrayages GM2 ENIBTaoufik Ben HadidPas encore d'évaluation
- Cahier Meca 4 ST 1Document10 pagesCahier Meca 4 ST 1Ibrahima DiopPas encore d'évaluation
- Mortaiseuse PDFDocument4 pagesMortaiseuse PDFOTHMAN MCHACHTIPas encore d'évaluation
- ENONCE TP Statique CRIC FILAIRE MECA3D V2012 PDFDocument4 pagesENONCE TP Statique CRIC FILAIRE MECA3D V2012 PDFSCORSAM1Pas encore d'évaluation
- Rapport RoulementDocument7 pagesRapport RoulementChristian Nkomayombi100% (1)
- 3-Patinette Electrique PDFDocument4 pages3-Patinette Electrique PDFAhmed AbenPas encore d'évaluation
- TD-8 Hydraulique ProportionnelleDocument5 pagesTD-8 Hydraulique ProportionnellemounaPas encore d'évaluation
- Etau A Serrage Rapide1Document7 pagesEtau A Serrage Rapide1Anonymous UzC0WUsqw50% (2)
- 11-Calcul Des RessortsDocument3 pages11-Calcul Des RessortsJeanne Varenne EmvutouPas encore d'évaluation
- Chap 2 EngrenagesDocument19 pagesChap 2 EngrenagesMhd Koundio100% (1)
- Mécanisme de SerrageDocument5 pagesMécanisme de Serragestafe100% (1)
- Rapport Mini ProjetDocument14 pagesRapport Mini ProjetYuba Mis n'Arrif0% (1)
- Corrige Flex I OnDocument6 pagesCorrige Flex I OnToufikJalalEddine100% (1)
- Calcul-Ajustement CotDocument2 pagesCalcul-Ajustement CotMansour Ndiaye100% (2)
- Stat Graph Cric HydrauDocument4 pagesStat Graph Cric HydrauAlmaxPas encore d'évaluation
- Verins Maintien COURS CORRIGEDocument7 pagesVerins Maintien COURS CORRIGEDog RayzPas encore d'évaluation
- Zgomot La Pornire - Volanta Cu Masa Dubla SI SX 12273 ZMS Geraeusche Beim Starten Des Motors En-1Document8 pagesZgomot La Pornire - Volanta Cu Masa Dubla SI SX 12273 ZMS Geraeusche Beim Starten Des Motors En-1Anonymous CZbChofeAPas encore d'évaluation
- Soutenance TP Verin Jeanne Et ClaudeDocument20 pagesSoutenance TP Verin Jeanne Et ClaudesitayohannmeyerPas encore d'évaluation
- Conception Et Developpement D'un Systeme de Gestion de QualiteDocument54 pagesConception Et Developpement D'un Systeme de Gestion de QualiteIssam MbarekPas encore d'évaluation
- Dépliant Cité de L'espérance - Cité Des LilasDocument8 pagesDépliant Cité de L'espérance - Cité Des LilasCharles KouassiPas encore d'évaluation
- Cas Pratique 3Document4 pagesCas Pratique 3Mamadou DiaPas encore d'évaluation
- Rapport PCP Samé Ouolof Kayes - 11102019Document35 pagesRapport PCP Samé Ouolof Kayes - 11102019Moussa100% (1)
- Edhc 4ème L - 7 - L'utilisation Rationnelle Des Ressources Et Le Bien-Être Des Membres de La FamilleDocument5 pagesEdhc 4ème L - 7 - L'utilisation Rationnelle Des Ressources Et Le Bien-Être Des Membres de La FamilleTOURE100% (1)
- Synthèse Sur La GeoeconomieDocument3 pagesSynthèse Sur La GeoeconomieAmine FxPas encore d'évaluation
- PU Hors CatégorieDocument3 pagesPU Hors CatégorieBtissamPas encore d'évaluation
- Ast Cs Ex FR Mock WebpageDocument21 pagesAst Cs Ex FR Mock WebpageMohamed OuedarbiPas encore d'évaluation
- FNTC Guide+signature+elecDocument72 pagesFNTC Guide+signature+elecazqsdfPas encore d'évaluation
- LM339 Exam 2018Document2 pagesLM339 Exam 2018ghouti ghoutiPas encore d'évaluation
- L-Antibible Du Controle de Gestion CH 2 GratuitDocument12 pagesL-Antibible Du Controle de Gestion CH 2 GratuitUn Vrai EnfoiréPas encore d'évaluation
- Upload - Résumé Du Cours-MCC Et Hacheur-2014-2015Document4 pagesUpload - Résumé Du Cours-MCC Et Hacheur-2014-2015Hichem Hamdi100% (3)
- EFM1Document2 pagesEFM1laila sadkiPas encore d'évaluation
- Phap bài KT ĐTQG số 2 tháng 12.2021-ĐỀDocument10 pagesPhap bài KT ĐTQG số 2 tháng 12.2021-ĐỀDiệu Anh NguyễnPas encore d'évaluation
- Documentation Technique NarrowDim X4 FR Ed4Document4 pagesDocumentation Technique NarrowDim X4 FR Ed4Abdessalem BachaPas encore d'évaluation
- Stockage de LDocument14 pagesStockage de Lbelabbes kheiraPas encore d'évaluation
- L'approche Stratégique Fondée Sur Les RessourcesDocument44 pagesL'approche Stratégique Fondée Sur Les RessourcesKhadija FahlatoPas encore d'évaluation
- Crea BahiDocument110 pagesCrea BahiarsalanePas encore d'évaluation
- Ex Micro 2Document2 pagesEx Micro 2Lolita zwina100% (1)
- Rapport de Stage: Stage Effectué Du 20/05/2019 Au 05/07/2019 ÀDocument27 pagesRapport de Stage: Stage Effectué Du 20/05/2019 Au 05/07/2019 Àapi-507649878Pas encore d'évaluation
- Disposition de Drainage Dans Les Barrages en Terre - OdtDocument4 pagesDisposition de Drainage Dans Les Barrages en Terre - OdtYassine ChaouiPas encore d'évaluation
- Villes Portuaires en MutationDocument147 pagesVilles Portuaires en MutationIhssane Haj Moussa100% (1)
- Chapitre 4-Comment Expliquer La Mobilite Sociale-Activit SDocument7 pagesChapitre 4-Comment Expliquer La Mobilite Sociale-Activit SRafanomezantsoaPas encore d'évaluation